24.1.17. Point Cloud Extraction
Attention
Running these algorithms requires QGIS installed with PDAL >= 2.5.0 (see menu).
24.1.17.1. Boundary
Added in 3.32
Exports a polygon file containing point cloud layer boundary. It may contain holes and it may be a multi-part polygon.
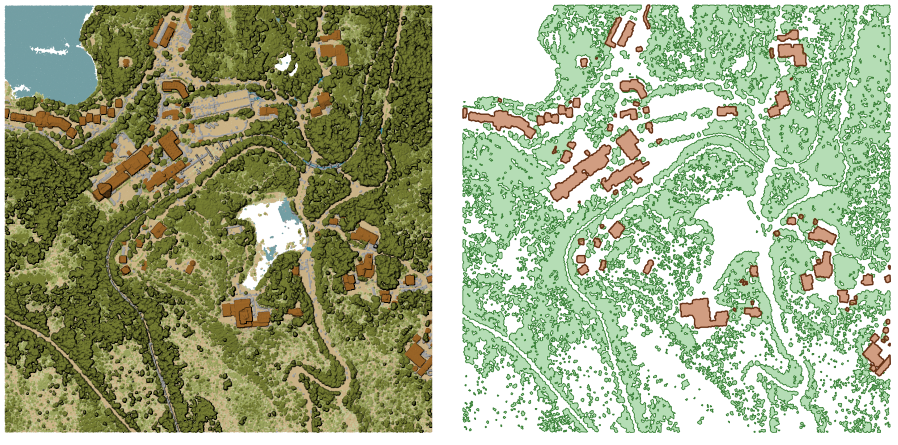
Fig. 24.47 Extracting high vegetation and building polygons from an input point cloud layer
Parameters
Basic parameters
Label |
Name |
Type |
Description |
|---|---|---|---|
Input layer |
|
[point cloud] |
Input point cloud layer to calculate boundary for |
Resolution of cells used to calculate boundary Optional |
|
[numeric: double] |
Resolution of cells used to calculate boundary |
Minimal number of points in a cell to consider cell occupied Optional |
|
[numeric: integer] |
Minimal number of points in a cell to consider cell occupied |
Boundary |
|
[vector: polygon] Default: |
Specify the point cloud file to use as output. One of:
|
Advanced parameters
Label |
Name |
Type |
Description |
|---|---|---|---|
Filter expression Optional |
|
[expression] |
A PDAL expression for selecting a subset of features in the point cloud data |
Cropping extent Optional |
|
[extent] |
A map extent for selecting a subset of features in the point cloud data Available methods are:
|
Outputs
Label |
Name |
Type |
Description |
|---|---|---|---|
Boundary |
|
[vector: polygon] |
Output polygon vector layer with the point cloud boundary.
Currently supported format is |
Python code
Algorithm ID: pdal:boundary
import processing
processing.run("algorithm_id", {parameter_dictionary})
The algorithm id is displayed when you hover over the algorithm in the Processing Toolbox. The parameter dictionary provides the parameter NAMEs and values. See Using processing algorithms from the console for details on how to run processing algorithms from the Python console.
24.1.17.2. Filter point cloud
Added in 3.32
Extracts point from the input point cloud which match PDAL expression and/or are inside of a cropping rectangle.
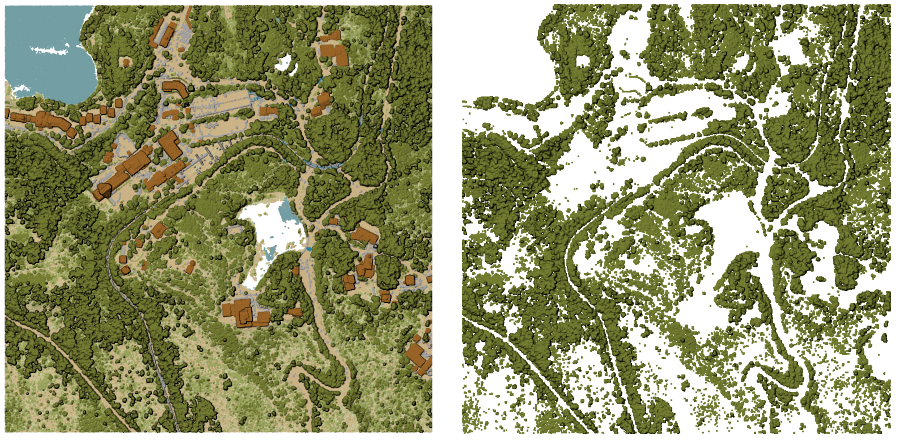
Fig. 24.48 Filtering of high vegetation class from an input point cloud layer
Parameters
Basic parameters
Label |
Name |
Type |
Description |
|---|---|---|---|
Input layer |
|
[point cloud] |
Input point cloud layer to export |
Filter expression |
|
[expression] |
A PDAL expression for selecting a subset of features in the point cloud data |
Cropping extent Optional |
|
[extent] |
A map extent for selecting a subset of features in the point cloud data Available methods are:
|
Filtered |
|
[point cloud] Default: |
Specify the point cloud file to export the data to. One of:
|
Advanced parameters
Label |
Name |
Type |
Description |
|---|---|---|---|
VPC Output Format
|
|
[enumeration] Default: 0 |
Specify the underlying format in which data are stored
for Virtual Point Cloud (
LAZ/LAS may be faster to process, however they only allow rendering of the point cloud extents. |
Outputs
Label |
Name |
Type |
Description |
|---|---|---|---|
Filtered |
|
[point cloud] |
Output point cloud layer with the filtered features of the input point cloud layer.
Currently supported formats are |
Python code
Algorithm ID: pdal:filter
import processing
processing.run("algorithm_id", {parameter_dictionary})
The algorithm id is displayed when you hover over the algorithm in the Processing Toolbox. The parameter dictionary provides the parameter NAMEs and values. See Using processing algorithms from the console for details on how to run processing algorithms from the Python console.
24.1.17.3. Point cloud density
Added in 3.32
Exports a raster file based on the number of points within each raster cell - useful for quality checking of point cloud datasets.
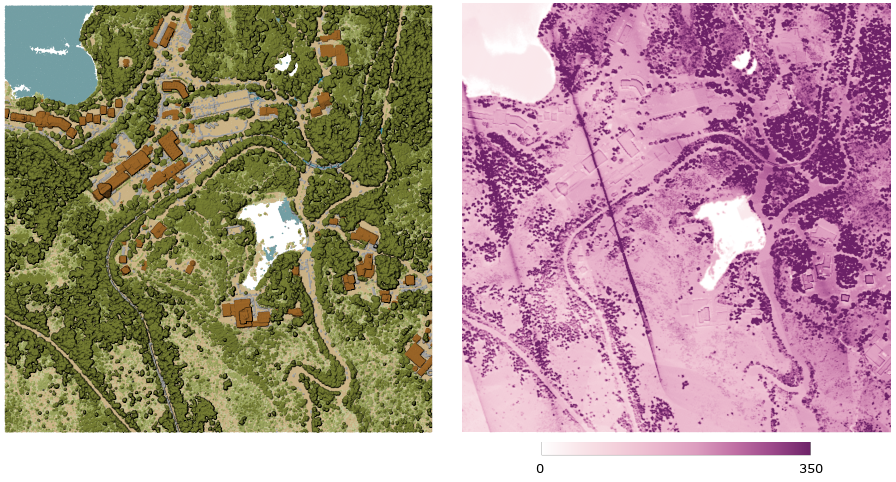
Fig. 24.49 Point density (number of points per 2x2 m) as a raster
Parameters
Basic parameters
Label |
Name |
Type |
Description |
|---|---|---|---|
Input layer |
|
[point cloud] |
Input point cloud layer to export |
Resolution of the density raster |
|
[numeric: double] Default: 1.0 |
Cell size of the output raster |
Tile size for parallel runs |
|
[numeric: integer] Default: 1000 |
Size of the tiles to split the data into for parallel runs |
Density |
|
[raster] Default: |
Specify the raster file to export the data to. One of:
|
Advanced parameters
Label |
Name |
Type |
Description |
|---|---|---|---|
Filter expression Optional |
|
[expression] |
A PDAL expression for selecting a subset of features in the point cloud data |
Cropping extent Optional |
|
[extent] |
A map extent for selecting a subset of features in the point cloud data Available methods are:
|
X origin of a tile for parallel runs Optional |
|
[numeric: double] |
|
Y origin of a tile for parallel runs Optional |
|
[numeric: double] |
Outputs
Label |
Name |
Type |
Description |
|---|---|---|---|
Density |
|
[raster] |
Output raster layer with number of points within each cell.
Currently supported format is |
Python code
Algorithm ID: pdal:density
import processing
processing.run("algorithm_id", {parameter_dictionary})
The algorithm id is displayed when you hover over the algorithm in the Processing Toolbox. The parameter dictionary provides the parameter NAMEs and values. See Using processing algorithms from the console for details on how to run processing algorithms from the Python console.