Important
Traducerea este un efort al comunității, la care puteți să vă alăturați. În prezent, această pagină este tradusă 62.92%.
28.1.12. Point Cloud Conversion
NEW in 3.32
Notă
These algorithms are only available if QGIS uses the PDAL library version 2.5.0 or newer.
28.1.12.1. Convert format
Converts a point cloud to a different file format, e.g. creates a compressed .LAZ.
Parametri
Etichetă |
Denumire |
Tip |
Descriere |
|---|---|---|---|
Strat de intrare |
|
[point cloud] |
Input point cloud layer to convert |
Converted |
|
[point cloud] Implicit: |
Specify the point cloud file to use as output. One of:
|
Rezultate
Etichetă |
Denumire |
Tip |
Descriere |
|---|---|---|---|
Converted |
|
[point cloud] |
Output point cloud layer in a modified file format.
Currently supported formats are |
Cod Python
Algorithm ID: pdal:convertformat
import processing
processing.run("algorithm_id", {parameter_dictionary})
ID-ul algoritmului se afișează atunci când cursorul mouse-ului se deplasează deasupra denumirii unui algoritm din caseta instrumentelor de procesare. Dicționarul parametrilor furnizează valorile și numele parametrilor. Pentru detalii despre rularea algoritmilor de procesare din consola Python, parcurgeți Utilizarea algoritmilor de procesare din consolă.
28.1.12.2. Export to raster
Exports point cloud data to a 2D raster grid having cell size of given resolution, writing values from the specified attribute.
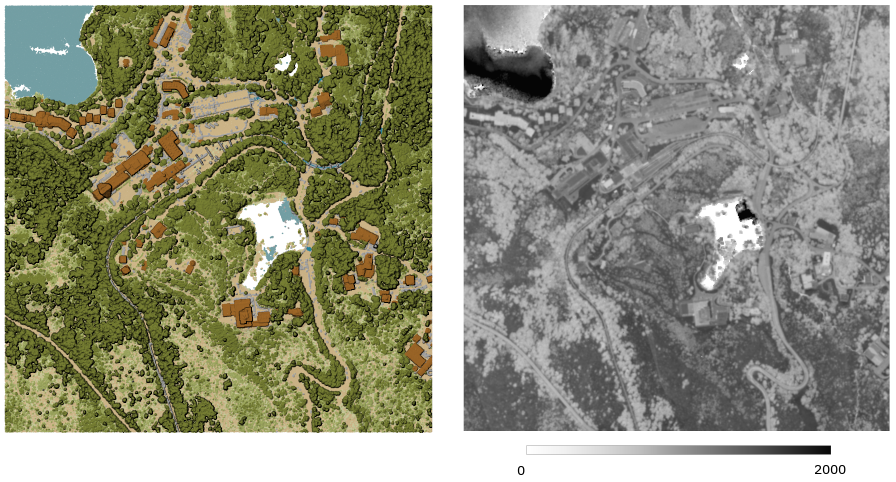
Fig. 28.10 Raster output using Intensity attribute of points
Parametri
Parametri de bază
Etichetă |
Denumire |
Tip |
Descriere |
|---|---|---|---|
Strat de intrare |
|
[point cloud] |
Input point cloud layer to export |
Atribut |
|
[field] [enumeration] |
A Field of the point cloud layer to extract the values from |
Resolution of the density raster |
|
[număr] Implicit: 1.0 |
Cell size of the output raster |
Tile size for parallel runs |
|
[număr] Implicit: 1000 |
|
Exported |
|
[raster] Implicit: |
Specify the raster file to export the data to. One of:
|
Parametri avansați
Etichetă |
Denumire |
Tip |
Descriere |
|---|---|---|---|
Filter expression Opţional |
|
[expresie] |
A PDAL expression for selecting a subset of features in the point cloud data |
Cropping extent Opţional |
|
[extent] |
A map extent for selecting a subset of features in the point cloud data Metodele disponibile sunt:
|
X origin of a tile for parallel runs Opţional |
|
[număr] |
|
Y origin of a tile for parallel runs Opţional |
|
[număr] |
Rezultate
Etichetă |
Denumire |
Tip |
Descriere |
|---|---|---|---|
Exported |
|
[raster] |
Output raster layer features of the point cloud layer are exported to.
Currently supported format is |
Cod Python
Algorithm ID: pdal:exportraster
import processing
processing.run("algorithm_id", {parameter_dictionary})
ID-ul algoritmului se afișează atunci când cursorul mouse-ului se deplasează deasupra denumirii unui algoritm din caseta instrumentelor de procesare. Dicționarul parametrilor furnizează valorile și numele parametrilor. Pentru detalii despre rularea algoritmilor de procesare din consola Python, parcurgeți Utilizarea algoritmilor de procesare din consolă.
28.1.12.3. Export raster (using triangulation)
Exports point cloud data to a 2D raster grid using a triangulation of points and then interpolating cell values from triangles.
Notă
Using this algorithm can be slower if you are dealing with a large dataset. If your point cloud is dense, you can export your ground points as a raster using the Export to raster algorithm.
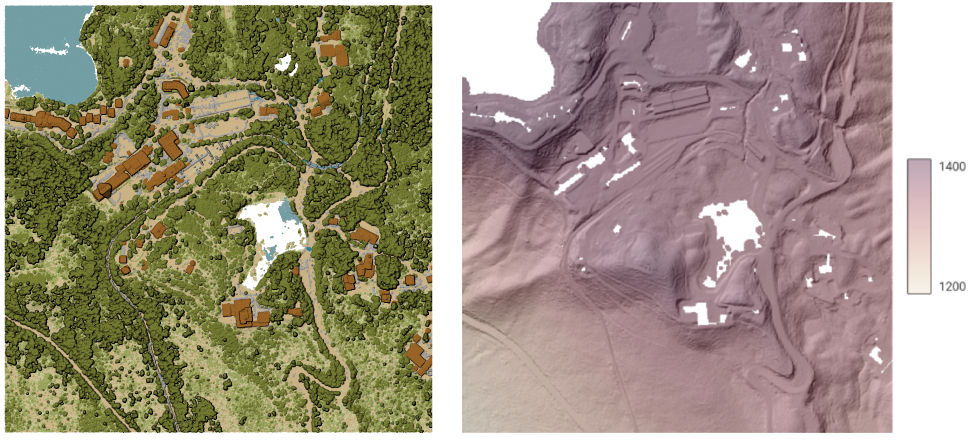
Fig. 28.11 Terrain raster output generated by point cloud triangulation
Parametri
Parametri de bază
Etichetă |
Denumire |
Tip |
Descriere |
|---|---|---|---|
Strat de intrare |
|
[point cloud] |
Input point cloud layer to export |
Resolution of the density raster |
|
[număr] Implicit: 1.0 |
Cell size of the output raster |
Tile size for parallel runs |
|
[număr] Implicit: 1000 |
|
Exported |
|
[raster] Implicit: |
Specify the raster file to export the data to. One of:
|
Parametri avansați
Etichetă |
Denumire |
Tip |
Descriere |
|---|---|---|---|
Filter expression Opţional |
|
[expresie] |
A PDAL expression for selecting a subset of features in the point cloud data |
Cropping extent Opţional |
|
[extent] |
A map extent for selecting a subset of features in the point cloud data Metodele disponibile sunt:
|
X origin of a tile for parallel runs Opţional |
|
[număr] |
|
Y origin of a tile for parallel runs Opţional |
|
[număr] |
Rezultate
Etichetă |
Denumire |
Tip |
Descriere |
|---|---|---|---|
Exportat (folosind triangularea) |
|
[raster] |
Output raster layer features of the point cloud layer are exported to.
Currently supported format is |
Cod Python
Algorithm ID: pdal:exportrastertin
import processing
processing.run("algorithm_id", {parameter_dictionary})
ID-ul algoritmului se afișează atunci când cursorul mouse-ului se deplasează deasupra denumirii unui algoritm din caseta instrumentelor de procesare. Dicționarul parametrilor furnizează valorile și numele parametrilor. Pentru detalii despre rularea algoritmilor de procesare din consola Python, parcurgeți Utilizarea algoritmilor de procesare din consolă.
28.1.12.4. Export to vector
Exports point cloud data to a vector layer with 3D points (a GeoPackage), optionally with extra attributes.
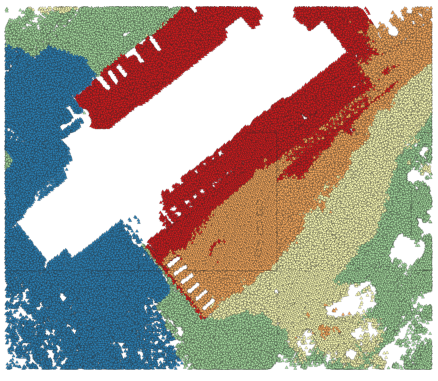
Fig. 28.12 Exporting point cloud (ground points) to a vector layer styled based on the elevation
Parametri
Parametri de bază
Etichetă |
Denumire |
Tip |
Descriere |
|---|---|---|---|
Strat de intrare |
|
[point cloud] |
Input point cloud layer to export |
Atribut Opţional |
|
[field] [list] |
One or more fields of the point cloud layer to export with the points. |
Exported |
|
[vector] Implicit: |
Specify the vector file to export the data to. One of:
|
Parametri avansați
Etichetă |
Denumire |
Tip |
Descriere |
|---|---|---|---|
Filter expression Opţional |
|
[expresie] |
A PDAL expression for selecting a subset of features in the point cloud data |
Cropping extent Opţional |
|
[extent] |
A map extent for selecting a subset of features in the point cloud data Metodele disponibile sunt:
|
Rezultate
Etichetă |
Denumire |
Tip |
Descriere |
|---|---|---|---|
Exported |
|
[vector] |
Output vector layer features of the point cloud layer are exported to.
Currently supported format is |
Cod Python
Algorithm ID: pdal:exportvector
import processing
processing.run("algorithm_id", {parameter_dictionary})
ID-ul algoritmului se afișează atunci când cursorul mouse-ului se deplasează deasupra denumirii unui algoritm din caseta instrumentelor de procesare. Dicționarul parametrilor furnizează valorile și numele parametrilor. Pentru detalii despre rularea algoritmilor de procesare din consola Python, parcurgeți Utilizarea algoritmilor de procesare din consolă.