중요
번역은 여러분이 참여할 수 있는 커뮤니티 활동입니다. 이 페이지는 현재 100.00% 번역되었습니다.
28.1.12. 점구름 변환
NEW in 3.32
참고
QGIS가 PDAL 라이브러리 2.5.0 이상 버전을 사용하는 경우에만 이 알고리즘들을 사용할 수 있습니다.
28.1.12.1. 포맷 변환하기
점구름을 다른 파일 포맷으로, 예를 들면 압축 .LAZ 파일을 생성하는 방식으로 변환합니다.
파라미터
라벨 |
이름 |
유형 |
설명 |
|---|---|---|---|
Input layer |
|
[point cloud] |
변환할 입력 점구름 레이어 |
Converted |
|
[point cloud] 기본값: |
산출물로 사용할 점구름 파일을 지정합니다. 다음 가운데 하나를 선택할 수 있습니다:
|
산출물
라벨 |
이름 |
유형 |
설명 |
|---|---|---|---|
Converted |
|
[point cloud] |
수정된 파일 포맷의 산출 점구름 레이어입니다. 현재 |
파이썬 코드
알고리즘 ID: pdal:convertformat
import processing
processing.run("algorithm_id", {parameter_dictionary})
공간 처리 툴박스에 있는 알고리즘 위에 마우스를 가져가면 알고리즘 ID 를 표시합니다. 파라미터 목록(dictionary) 은 파라미터 이름 및 값을 제공합니다. 파이썬 콘솔에서 공간 처리 알고리즘을 어떻게 실행하는지 자세히 알고 싶다면 콘솔에서 공간 처리 알고리즘 사용 을 참조하세요.
28.1.12.2. 래스터로 내보내기
점구름 데이터를 2차원 래스터 그리드로 내보냅니다. 지정한 해상도가 그리드 셀 크기이며, 지정한 속성의 값을 작성합니다.
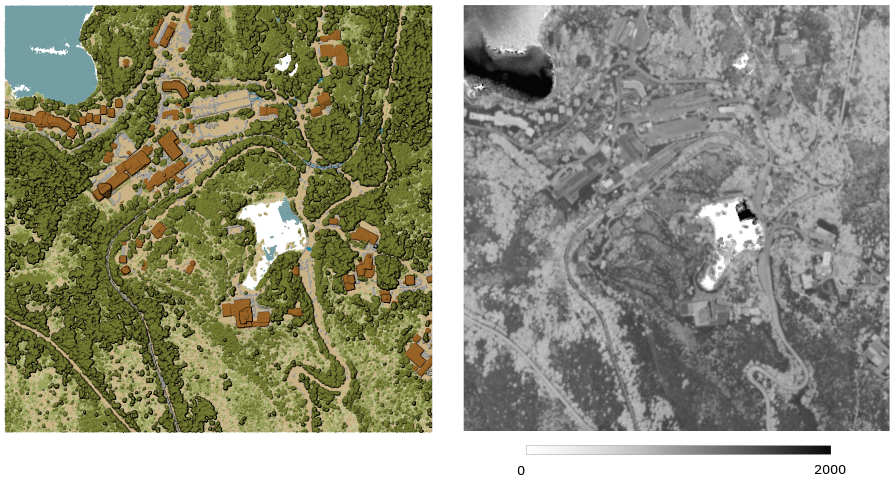
그림 28.10 포인트의 강도(intensity) 속성을 사용한 래스터 산출물
파라미터
기본 파라미터
라벨 |
이름 |
유형 |
설명 |
|---|---|---|---|
Input layer |
|
[point cloud] |
내보낼 입력 점구름 레이어 |
Attribute |
|
[field] [enumeration] |
값을 추출할 점구름 레이어의 필드 |
Resolution of the density raster |
|
[number] 기본값: 1.0 |
산출 래스터의 셀 크기 |
Tile size for parallel runs |
|
[number] 기본값: 1000 |
|
Exported |
|
[raster] 기본값: |
데이터를 내보낼 래스터 파일을 지정합니다. 다음 가운데 하나를 선택할 수 있습니다:
|
고급 파라미터
라벨 |
이름 |
유형 |
설명 |
|---|---|---|---|
Filter expression 선택적 |
|
[expression] |
점구름 데이터에 있는 피처의 하위 집합을 선택하기 위한 PDAL 표현식 |
Cropping extent 선택적 |
|
[extent] |
점구름 데이터에 있는 피처의 하위 집합을 선택하기 위한 맵 범위입니다. 다음과 같은 메소드를 사용할 수 있습니다: |
X origin of a tile for parallel runs 선택적 |
|
[number] |
|
Y origin of a tile for parallel runs 선택적 |
|
[number] |
산출물
라벨 |
이름 |
유형 |
설명 |
|---|---|---|---|
Exported |
|
[raster] |
점구름 레이어의 피처를 내보낸 산출 래스터 레이어입니다. 현재 |
파이썬 코드
알고리즘 ID: pdal:exportraster
import processing
processing.run("algorithm_id", {parameter_dictionary})
공간 처리 툴박스에 있는 알고리즘 위에 마우스를 가져가면 알고리즘 ID 를 표시합니다. 파라미터 목록(dictionary) 은 파라미터 이름 및 값을 제공합니다. 파이썬 콘솔에서 공간 처리 알고리즘을 어떻게 실행하는지 자세히 알고 싶다면 콘솔에서 공간 처리 알고리즘 사용 을 참조하세요.
28.1.12.3. 래스터 내보내기 (삼각분할 사용)
점구름 데이터를 포인트들을 삼각분할한 다음 삼각형들에서 나온 셀 값들을 보간해서 2차원 래스터 그리드로 내보냅니다.
참고
이 알고리즘은 대용량 데이터셋을 처리하는 경우 느릴 수 있습니다. 사용자의 점구름 밀도가 높다면, 지상 포인트들을 래스터로 내보내기 알고리즘을 사용해서 래스터로 내보내면 됩니다.
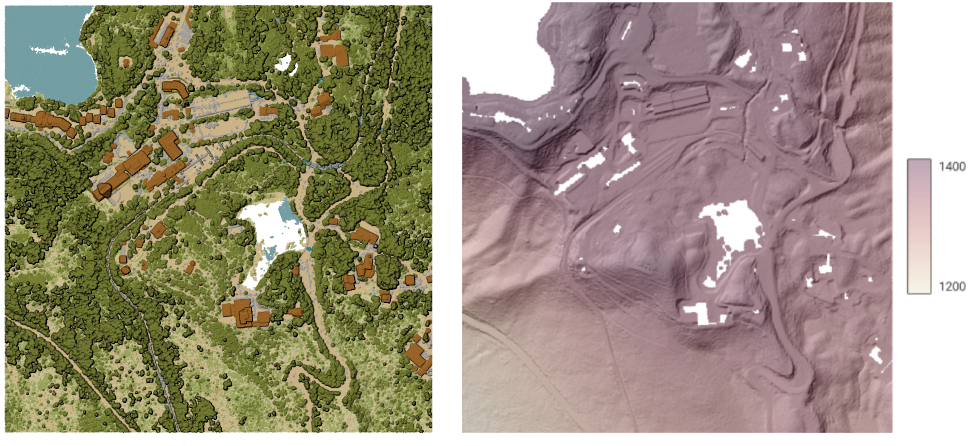
그림 28.11 점구름 삼각분할로 생성된 지형 래스터 산출물
파라미터
기본 파라미터
라벨 |
이름 |
유형 |
설명 |
|---|---|---|---|
Input layer |
|
[point cloud] |
내보낼 입력 점구름 레이어 |
Resolution of the density raster |
|
[number] 기본값: 1.0 |
산출 래스터의 셀 크기 |
Tile size for parallel runs |
|
[number] 기본값: 1000 |
|
Exported |
|
[raster] 기본값: |
데이터를 내보낼 래스터 파일을 지정합니다. 다음 가운데 하나를 선택할 수 있습니다:
|
고급 파라미터
라벨 |
이름 |
유형 |
설명 |
|---|---|---|---|
Filter expression 선택적 |
|
[expression] |
점구름 데이터에 있는 피처의 하위 집합을 선택하기 위한 PDAL 표현식 |
Cropping extent 선택적 |
|
[extent] |
점구름 데이터에 있는 피처의 하위 집합을 선택하기 위한 맵 범위입니다. 다음과 같은 메소드를 사용할 수 있습니다: |
X origin of a tile for parallel runs 선택적 |
|
[number] |
|
Y origin of a tile for parallel runs 선택적 |
|
[number] |
산출물
라벨 |
이름 |
유형 |
설명 |
|---|---|---|---|
Exported (using triangulation) |
|
[raster] |
점구름 레이어의 피처를 내보낸 산출 래스터 레이어입니다. 현재 |
파이썬 코드
알고리즘 ID: pdal:exportrastertin
import processing
processing.run("algorithm_id", {parameter_dictionary})
공간 처리 툴박스에 있는 알고리즘 위에 마우스를 가져가면 알고리즘 ID 를 표시합니다. 파라미터 목록(dictionary) 은 파라미터 이름 및 값을 제공합니다. 파이썬 콘솔에서 공간 처리 알고리즘을 어떻게 실행하는지 자세히 알고 싶다면 콘솔에서 공간 처리 알고리즘 사용 을 참조하세요.
28.1.12.4. 벡터로 내보내기
점구름 데이터를 3차원 포인트를 가진 벡터 레이어(GeoPackage)로 내보냅니다. 선택적인 추가 속성을 가질 수도 있습니다.
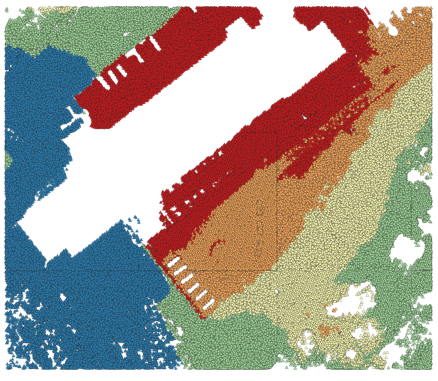
그림 28.12 점구름(지상 포인트)를 표고 기반 스타일을 적용한 벡터 레이어로 내보내기
파라미터
기본 파라미터
라벨 |
이름 |
유형 |
설명 |
|---|---|---|---|
Input layer |
|
[point cloud] |
내보낼 입력 점구름 레이어 |
Attribute 선택적 |
|
[field] [list] |
포인트와 함께 내보낼 점구름 레이어의 하나 이상의 필드 |
Exported |
|
[vector] 기본값: |
데이터를 내보낼 벡터 파일을 지정합니다. 다음 가운데 하나를 선택할 수 있습니다:
|
고급 파라미터
라벨 |
이름 |
유형 |
설명 |
|---|---|---|---|
Filter expression 선택적 |
|
[expression] |
점구름 데이터에 있는 피처의 하위 집합을 선택하기 위한 PDAL 표현식 |
Cropping extent 선택적 |
|
[extent] |
점구름 데이터에 있는 피처의 하위 집합을 선택하기 위한 맵 범위입니다. 다음과 같은 메소드를 사용할 수 있습니다: |
산출물
라벨 |
이름 |
유형 |
설명 |
|---|---|---|---|
Exported |
|
[vector] |
점구름 레이어의 피처를 내보낸 산출 벡터 레이어입니다. 현재 |
파이썬 코드
알고리즘 ID: pdal:exportvector
import processing
processing.run("algorithm_id", {parameter_dictionary})
공간 처리 툴박스에 있는 알고리즘 위에 마우스를 가져가면 알고리즘 ID 를 표시합니다. 파라미터 목록(dictionary) 은 파라미터 이름 및 값을 제공합니다. 파이썬 콘솔에서 공간 처리 알고리즘을 어떻게 실행하는지 자세히 알고 싶다면 콘솔에서 공간 처리 알고리즘 사용 을 참조하세요.