중요
번역은 여러분이 참여할 수 있는 커뮤니티 활동입니다. 이 페이지는 현재 100.00% 번역되었습니다.
28.1.13. 점구름 데이터 관리
NEW in 3.32
참고
QGIS가 PDAL 라이브러리 2.5.0 이상 버전을 사용하는 경우에만 이 알고리즘들을 사용할 수 있습니다.
28.1.13.1. 투영체 할당하기
점구름 레이어의 좌표계가 누락되었거나 잘못된 경우, 새 레이어를 생성하는 방식으로 점구름 레이어에 좌표계를 할당합니다.
더 보기
파라미터
라벨 |
이름 |
유형 |
설명 |
|---|---|---|---|
Input layer |
|
[point cloud] |
좌표계를 할당할 입력 점구름 레이어 |
Desired CRS |
|
[crs] |
레이어에 적용할 좌표계 |
Output layer |
|
[point cloud] 기본값: |
산출물로 사용할 점구름 파일을 지정합니다. 다음 가운데 하나로 저장할 수 있습니다:
|
산출물
라벨 |
이름 |
유형 |
설명 |
|---|---|---|---|
Converted |
|
[point cloud] |
새 좌표계를 가진 산출 점구름 레이어입니다. 현재 |
파이썬 코드
알고리즘 ID: pdal:assignprojection
import processing
processing.run("algorithm_id", {parameter_dictionary})
공간 처리 툴박스에 있는 알고리즘 위에 마우스를 가져가면 알고리즘 ID 를 표시합니다. 파라미터 목록(dictionary) 은 파라미터 이름 및 값을 제공합니다. 파이썬 콘솔에서 공간 처리 알고리즘을 어떻게 실행하는지 자세히 알고 싶다면 콘솔에서 공간 처리 알고리즘 사용 을 참조하세요.
28.1.13.2. 가상 점구름(VPC) 작성하기
입력 점구름 데이터로부터 가상 점구름(Virtual Point Cloud) 을 생성합니다.
선택적인 파라미터들을 체크하지 않은 채 알고리즘을 실행하면, 알고리즘이 입력 파일의 메타데이터만 읽어올 것이기 때문에 VPC를 매우 빠르게 작성할 것입니다. 선택적인 파라미터를 하나라도 설정한 경우, 알고리즘이 모든 포인트를 읽어올 것이기 때문에 시간이 걸릴 수 있습니다.
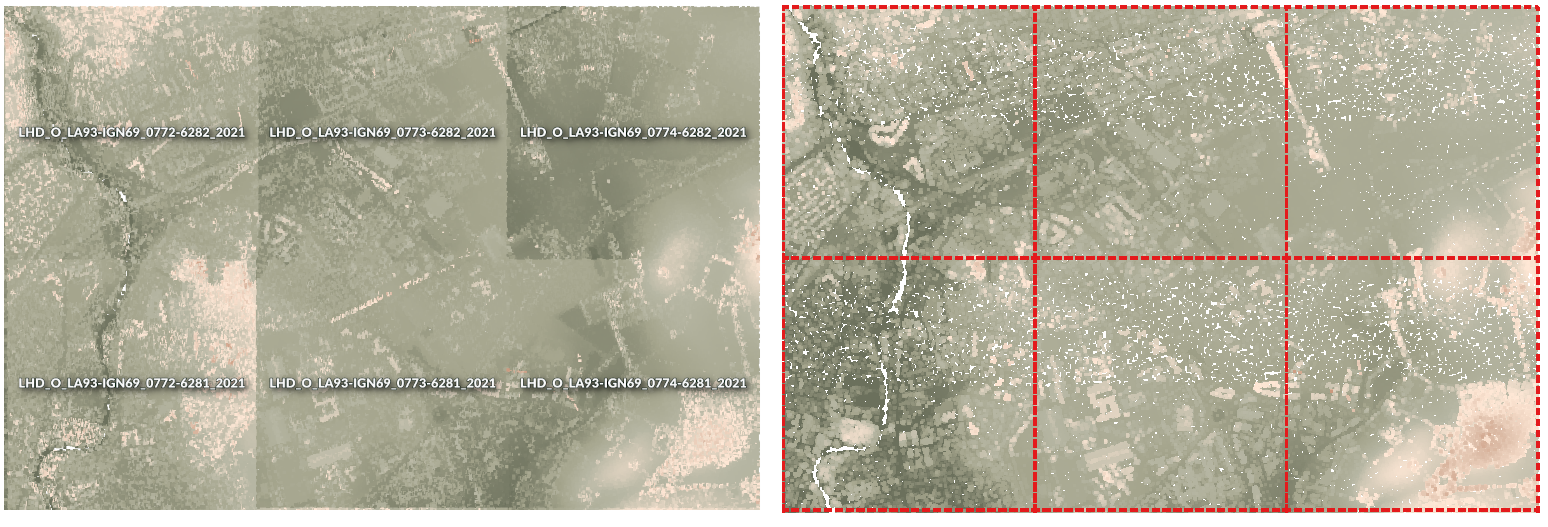
그림 28.13 점구름 타일 집합으로부터 오버뷰를 가진 가상 점구름 생성하기
더 보기
파라미터
라벨 |
이름 |
유형 |
설명 |
|---|---|---|---|
Input layers |
|
[point cloud] [list] |
가상 점구름 레이어 내부에 결합할 입력 점구름 레이어들 |
Calculate boundary polygon |
|
[boolean] 기본값: False |
참으로 설정하면 데이터의 (직사각형 범위만 표시하기보다) 정확한 경계를 표시합니다. |
Calculate statistics |
|
[boolean] 기본값: False |
참으로 설정하면 여러 속성들의 값의 범위를 이해할 수 있습니다. |
Build overview point cloud |
|
[boolean] 기본값: False |
모든 입력 데이터의 (원본 데이터에서 1,000번째마다의 포인트만 사용해서) “솎아낸(thinned)” 단일 점구름을 생성합니다. VPC 파일 옆에 오버뷰 점구름을 생성할 것입니다. 예를 들어 |
Virtual point cloud |
|
[point cloud] 기본값: |
데이터를 작성할 점구름 파일을 지정합니다. 다음 가운데 하나를 선택할 수 있습니다:
|
산출물
라벨 |
이름 |
유형 |
설명 |
|---|---|---|---|
Virtual point cloud |
|
[raster] |
모든 입력 데이터를 결합한, 가상 파일로써의 산출 점구름 레이어입니다. |
파이썬 코드
알고리즘 ID: pdal:virtualpointcloud
import processing
processing.run("algorithm_id", {parameter_dictionary})
공간 처리 툴박스에 있는 알고리즘 위에 마우스를 가져가면 알고리즘 ID 를 표시합니다. 파라미터 목록(dictionary) 은 파라미터 이름 및 값을 제공합니다. 파이썬 콘솔에서 공간 처리 알고리즘을 어떻게 실행하는지 자세히 알고 싶다면 콘솔에서 공간 처리 알고리즘 사용 을 참조하세요.
28.1.13.3. 잘라내기(Clip)
산출되는 점구름이 폴리곤 내부에 들어오는 포인트만 담게 되도록 점구름 레이어를 폴리곤 레이어로 잘라냅니다.
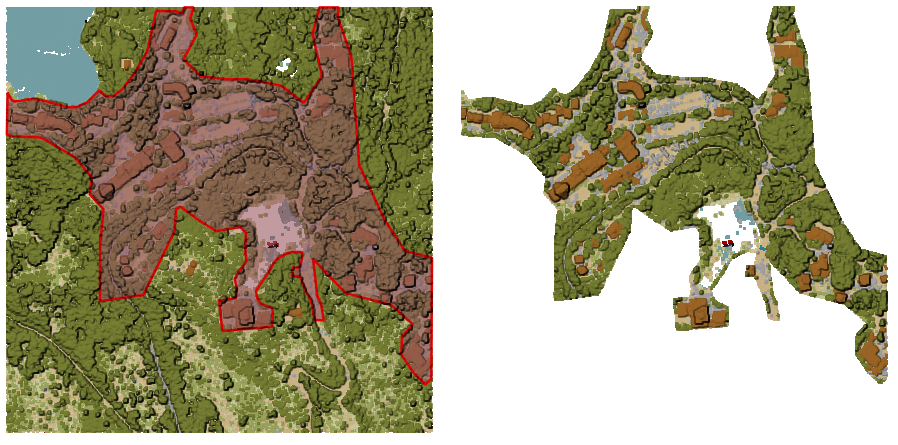
그림 28.14 입력 점구름 레이어를 폴리곤 커버리지로 잘라내기
파라미터
기본 파라미터
라벨 |
이름 |
유형 |
설명 |
|---|---|---|---|
Input layer |
|
[point cloud] |
잘라낼 입력 점구름 레이어 |
Clipping polygons |
|
[vector: polygon] |
포인트들을 잘라내기 위한 커버리지로 사용할 폴리곤 벡터 레이어 |
Clipped |
|
[point cloud] 기본값: |
잘라낸 포인트를 내보낼 점구름 파일을 지정합니다. 다음 가운데 하나를 선택할 수 있습니다:
|
고급 파라미터
라벨 |
이름 |
유형 |
설명 |
|---|---|---|---|
Filter expression 선택적 |
|
[expression] |
점구름 데이터에 있는 피처의 하위 집합을 선택하기 위한 PDAL 표현식 |
Cropping extent 선택적 |
|
[extent] |
점구름 데이터에 있는 피처의 하위 집합을 선택하기 위한 맵 범위 다음과 같은 메소드를 사용할 수 있습니다: |
산출물
라벨 |
이름 |
유형 |
설명 |
|---|---|---|---|
Clipped |
|
[raster] |
커버리지 폴리곤 레이어 내부에 들어오는 포인트들을 피처로 가진 산출 점구름입니다. |
파이썬 코드
알고리즘 ID: pdal:clip
import processing
processing.run("algorithm_id", {parameter_dictionary})
공간 처리 툴박스에 있는 알고리즘 위에 마우스를 가져가면 알고리즘 ID 를 표시합니다. 파라미터 목록(dictionary) 은 파라미터 이름 및 값을 제공합니다. 파이썬 콘솔에서 공간 처리 알고리즘을 어떻게 실행하는지 자세히 알고 싶다면 콘솔에서 공간 처리 알고리즘 사용 을 참조하세요.
28.1.13.4. COPC 생성하기
모든 입력 점구름 파일에 대한 인덱스를 배치(batch) 모드로 생성합니다.
파라미터
라벨 |
이름 |
유형 |
설명 |
|---|---|---|---|
Input layers |
|
[point cloud] [list] |
인덱스를 생성할 입력 점구름 레이어들 |
Output directory 선택적 |
|
[folder] 기본값: |
새 파일을 생성할 폴더를 지정합니다. 다음 가운데 하나를 선택할 수 있습니다:
|
산출물
라벨 |
이름 |
유형 |
설명 |
|---|---|---|---|
Output directory |
|
[folder] |
동반하는 COPC 인덱스 파일을 가진 점구름 레이어들을 담고 있는 산출 폴더입니다. |
파이썬 코드
알고리즘 ID: pdal:createcopc
import processing
processing.run("algorithm_id", {parameter_dictionary})
공간 처리 툴박스에 있는 알고리즘 위에 마우스를 가져가면 알고리즘 ID 를 표시합니다. 파라미터 목록(dictionary) 은 파라미터 이름 및 값을 제공합니다. 파이썬 콘솔에서 공간 처리 알고리즘을 어떻게 실행하는지 자세히 알고 싶다면 콘솔에서 공간 처리 알고리즘 사용 을 참조하세요.
28.1.13.5. 정보
입력 점구름 파일로부터 기본 메타데이터를 산출합니다.
산출 정보의 예시:
LAS 1.4
point format 6
count 56736130
scale 0.001 0.001 0.001
offset 431749.999 5440919.999 968.898
extent 431250 5440420 424.266
432249.999 5441419.999 1513.531
crs ETRS89 / UTM zone 34N (N-E) (EPSG:3046) (vertical CRS missing!)
units horizontal=metre vertical=unknown
Attributes:
- X floating 8
- Y floating 8
- Z floating 8
- Intensity unsigned 2
- ReturnNumber unsigned 1
- NumberOfReturns unsigned 1
- ScanDirectionFlag unsigned 1
- EdgeOfFlightLine unsigned 1
- Classification unsigned 1
- ScanAngleRank floating 4
- UserData unsigned 1
- PointSourceId unsigned 2
- GpsTime floating 8
- ScanChannel unsigned 1
- ClassFlags unsigned 1
파라미터
라벨 |
이름 |
유형 |
설명 |
|---|---|---|---|
Input layer |
|
[point cloud] |
메타데이터 정보를 추출할 입력 점구름 레이어 |
Layer information |
|
[file] 기본값: |
메타데이터 정보를 저장할 파일을 지정합니다. 다음 가운데 하나를 선택할 수 있습니다:
|
산출물
라벨 |
이름 |
유형 |
설명 |
|---|---|---|---|
Layer information |
|
[vector] |
메타데이터 정보를 저장할 |
파이썬 코드
알고리즘 ID: pdal:info
import processing
processing.run("algorithm_id", {parameter_dictionary})
공간 처리 툴박스에 있는 알고리즘 위에 마우스를 가져가면 알고리즘 ID 를 표시합니다. 파라미터 목록(dictionary) 은 파라미터 이름 및 값을 제공합니다. 파이썬 콘솔에서 공간 처리 알고리즘을 어떻게 실행하는지 자세히 알고 싶다면 콘솔에서 공간 처리 알고리즘 사용 을 참조하세요.
28.1.13.6. 병합하기
점구름 파일 여러 개를 단일 파일로 병합합니다.
더 보기
파라미터
기본 파라미터
라벨 |
이름 |
유형 |
설명 |
|---|---|---|---|
Input layers |
|
[point cloud] [list] |
단일 레이어로 병합시킬 입력 점구름 레이어들 |
Merged |
|
[point cloud] 기본값: |
입력 파일들을 병합시킨 산출 점구름 파일을 지정합니다. 다음 가운데 하나를 선택할 수 있습니다:
|
고급 파라미터
라벨 |
이름 |
유형 |
설명 |
|---|---|---|---|
Filter expression 선택적 |
|
[expression] |
점구름 데이터에 있는 피처의 하위 집합을 선택하기 위한 PDAL 표현식 |
Cropping extent 선택적 |
|
[extent] |
점구름 데이터에 있는 피처의 하위 집합을 선택하기 위한 맵 범위 다음과 같은 메소드를 사용할 수 있습니다: |
산출물
라벨 |
이름 |
유형 |
설명 |
|---|---|---|---|
Merged |
|
[point cloud] |
모든 입력 데이터를 병합한 산출 점구름 레이어입니다. |
파이썬 코드
알고리즘 ID: pdal:merge
import processing
processing.run("algorithm_id", {parameter_dictionary})
공간 처리 툴박스에 있는 알고리즘 위에 마우스를 가져가면 알고리즘 ID 를 표시합니다. 파라미터 목록(dictionary) 은 파라미터 이름 및 값을 제공합니다. 파이썬 콘솔에서 공간 처리 알고리즘을 어떻게 실행하는지 자세히 알고 싶다면 콘솔에서 공간 처리 알고리즘 사용 을 참조하세요.
28.1.13.7. 재투영하기
점구름을 다른 좌표계로 재투영합니다.
더 보기
파라미터
라벨 |
이름 |
유형 |
설명 |
|---|---|---|---|
Input layer |
|
[point cloud] |
다른 좌표계로 재투영할 입력 점구름 레이어 |
Target CRS |
|
[crs] |
레이어에 적용할 좌표계 |
Reprojected |
|
[point cloud] 기본값: |
재투영시킨 점구름 파일을 지정합니다. 다음 가운데 하나로 저장할 수 있습니다:
|
고급 파라미터
라벨 |
이름 |
유형 |
설명 |
|---|---|---|---|
Coordinate operation 선택적 |
|
[datum] |
원본 좌표계와 대상 좌표계 사이에 데이터를 재투영하기 위해 사용할 기준점 변환 입니다. |
산출물
라벨 |
이름 |
유형 |
설명 |
|---|---|---|---|
REPROJECTED |
|
[point cloud] |
대상 좌표계를 적용한 산출 점구름 레이어입니다. |
파이썬 코드
알고리즘 ID: pdal:reproject
import processing
processing.run("algorithm_id", {parameter_dictionary})
공간 처리 툴박스에 있는 알고리즘 위에 마우스를 가져가면 알고리즘 ID 를 표시합니다. 파라미터 목록(dictionary) 은 파라미터 이름 및 값을 제공합니다. 파이썬 콘솔에서 공간 처리 알고리즘을 어떻게 실행하는지 자세히 알고 싶다면 콘솔에서 공간 처리 알고리즘 사용 을 참조하세요.
28.1.13.8. 솎아내기 (샘플링 반경)
거리 포인트로 샘플링을 수행하는 방식으로 점구름의 솎아낸 버전을 생성합니다. (특정 반경 안에 들어오는 포인트의 개수를 감소시킵니다.)

그림 28.15 점구름 솎아내기 (샘플링 반경으로)
더 보기
파라미터
기본 파라미터
라벨 |
이름 |
유형 |
설명 |
|---|---|---|---|
Input layer |
|
[point cloud] |
솎아낸 버전을 생성할 입력 점구름 레이어 |
Sampling radius (in map units) |
|
[number] 기본값: 1.0 |
이 안에 들어오는 포인트들을 유일 포인트로 샘플링할 거리 |
Thinned (by radius) |
|
[point cloud] 기본값: |
감소된 포인트들을 가진 산출 점구름 파일을 지정합니다. 다음 가운데 하나를 선택할 수 있습니다:
|
고급 파라미터
라벨 |
이름 |
유형 |
설명 |
|---|---|---|---|
Filter expression 선택적 |
|
[expression] |
점구름 데이터에 있는 피처의 하위 집합을 선택하기 위한 PDAL 표현식 |
Cropping extent 선택적 |
|
[extent] |
점구름 데이터에 있는 피처의 하위 집합을 선택하기 위한 맵 범위 다음과 같은 메소드를 사용할 수 있습니다: |
산출물
라벨 |
이름 |
유형 |
설명 |
|---|---|---|---|
Thinned (by radius) |
|
[point cloud] |
감소된 포인트들을 가진 산출 점구름 레이어입니다. |
파이썬 코드
알고리즘 ID: pdal:thinbyradius
import processing
processing.run("algorithm_id", {parameter_dictionary})
공간 처리 툴박스에 있는 알고리즘 위에 마우스를 가져가면 알고리즘 ID 를 표시합니다. 파라미터 목록(dictionary) 은 파라미터 이름 및 값을 제공합니다. 파이썬 콘솔에서 공간 처리 알고리즘을 어떻게 실행하는지 자세히 알고 싶다면 콘솔에서 공간 처리 알고리즘 사용 을 참조하세요.
28.1.13.9. 솎아내기 (포인트 건너뛰기)
N번째마다의 포인트만 남기는 방식으로 점구름의 솎아낸 버전을 생성합니다. (가까이 있는 포인트들을 건너뛰어 포인트의 개수를 감소시킵니다.)
더 보기
파라미터
기본 파라미터
라벨 |
이름 |
유형 |
설명 |
|---|---|---|---|
Input layer |
|
[point cloud] |
솎아낸 버전을 생성할 입력 점구름 레이어 |
Number of points to skip |
|
[number] 기본값: 1 |
입력 레이어에서 N번째마다의 포인트만 남깁니다. |
Thinned (by decimation) |
|
[point cloud] 기본값: |
감소된 포인트들을 가진 산출 점구름 파일을 지정합니다. 다음 가운데 하나를 선택할 수 있습니다:
|
고급 파라미터
라벨 |
이름 |
유형 |
설명 |
|---|---|---|---|
Filter expression 선택적 |
|
[expression] |
점구름 데이터에 있는 피처의 하위 집합을 선택하기 위한 PDAL 표현식 |
Cropping extent 선택적 |
|
[extent] |
점구름 데이터에 있는 피처의 하위 집합을 선택하기 위한 맵 범위 다음과 같은 메소드를 사용할 수 있습니다: |
산출물
라벨 |
이름 |
유형 |
설명 |
|---|---|---|---|
Thinned (by decimation) |
|
[point cloud] |
감소된 포인트들을 가진 산출 점구름 레이어입니다. |
파이썬 코드
알고리즘 ID: pdal:thinbydecimate
import processing
processing.run("algorithm_id", {parameter_dictionary})
공간 처리 툴박스에 있는 알고리즘 위에 마우스를 가져가면 알고리즘 ID 를 표시합니다. 파라미터 목록(dictionary) 은 파라미터 이름 및 값을 제공합니다. 파이썬 콘솔에서 공간 처리 알고리즘을 어떻게 실행하는지 자세히 알고 싶다면 콘솔에서 공간 처리 알고리즘 사용 을 참조하세요.
28.1.13.10. 타일
입력 점구름 파일로부터 타일을 생성합니다. QGIS에서 점구름 데이터셋을 (보기 또는 분석) 작업할 때 최고의 성능을 보여주기 위해 권장됩니다.
더 보기
파라미터
기본 파라미터
라벨 |
이름 |
유형 |
설명 |
|---|---|---|---|
Input layers |
|
[point cloud] [list] |
타일을 생성할 입력 점구름 레이어들 |
Tile length |
|
[number] Default: 1000.0 |
생성된 각 타일의 변의 길이 |
Output directory |
|
[folder] 기본값: |
생성된 타일을 저장할 폴더를 지정합니다. 다음 가운데 하나를 선택할 수 있습니다:
|
고급 파라미터
라벨 |
이름 |
유형 |
설명 |
|---|---|---|---|
Assign CRS 선택적 |
|
[crs] |
레이어에 적용할 좌표계 |
산출물
라벨 |
이름 |
유형 |
설명 |
|---|---|---|---|
Output directory |
|
[folder] |
입력 파일로부터 생성된 타일들을 담고 있는 산출 폴더입니다. |
파이썬 코드
알고리즘 ID: pdal:tile
import processing
processing.run("algorithm_id", {parameter_dictionary})
공간 처리 툴박스에 있는 알고리즘 위에 마우스를 가져가면 알고리즘 ID 를 표시합니다. 파라미터 목록(dictionary) 은 파라미터 이름 및 값을 제공합니다. 파이썬 콘솔에서 공간 처리 알고리즘을 어떻게 실행하는지 자세히 알고 싶다면 콘솔에서 공간 처리 알고리즘 사용 을 참조하세요.