Importante
A tradução é um esforço comunitário você pode contribuir. Esta página está atualmente traduzida em 71.94%.
28.1.13. Point Cloud Data Management
NEW in 3.32
Nota
These algorithms are only available if QGIS uses the PDAL library version 2.5.0 or newer.
28.1.13.1. Atribuir projeção
Assigns a Coordinate Reference System to a point cloud layer, if it is missing or wrong. A new layer is created.
Ver também
Parâmetros
Etiqueta |
Nome |
Tipo |
Descrição |
|---|---|---|---|
Camada de entrada |
|
[point cloud] |
Input point cloud layer to assign a CRS to |
SRC desejada |
|
[src] |
The CRS to apply to the layer |
Camada de saída |
|
[point cloud] Padrão: |
Specify the point cloud file to use as output. One of:
|
Saídas
Etiqueta |
Nome |
Tipo |
Descrição |
|---|---|---|---|
Convertido |
|
[point cloud] |
Output point cloud layer with a new CRS.
Currently supported formats are |
Código Python
Algorithm ID: pdal:assignprojection
import processing
processing.run("algorithm_id", {parameter_dictionary})
O id do algoritmo é exibido quando você passa o mouse sobre o algoritmo na Caixa de ferramentas de processamento. O dicionário de parâmetros fornece os nomes e valores dos parâmetros. Veja Usando os algoritmos do processamento a partir do Terminal Python. para detalhes sobre como executar algoritmos de processamento a partir do console Python.
28.1.13.2. Build virtual point cloud (VPC)
Creates a virtual point cloud (VPC) from input point cloud data.
If you leave the optional parameters unchecked, the VPC file will be built very quickly as the algorithm will only read metadata of input files. With any of the optional parameters set, the algorithm will read all points which can take some time.
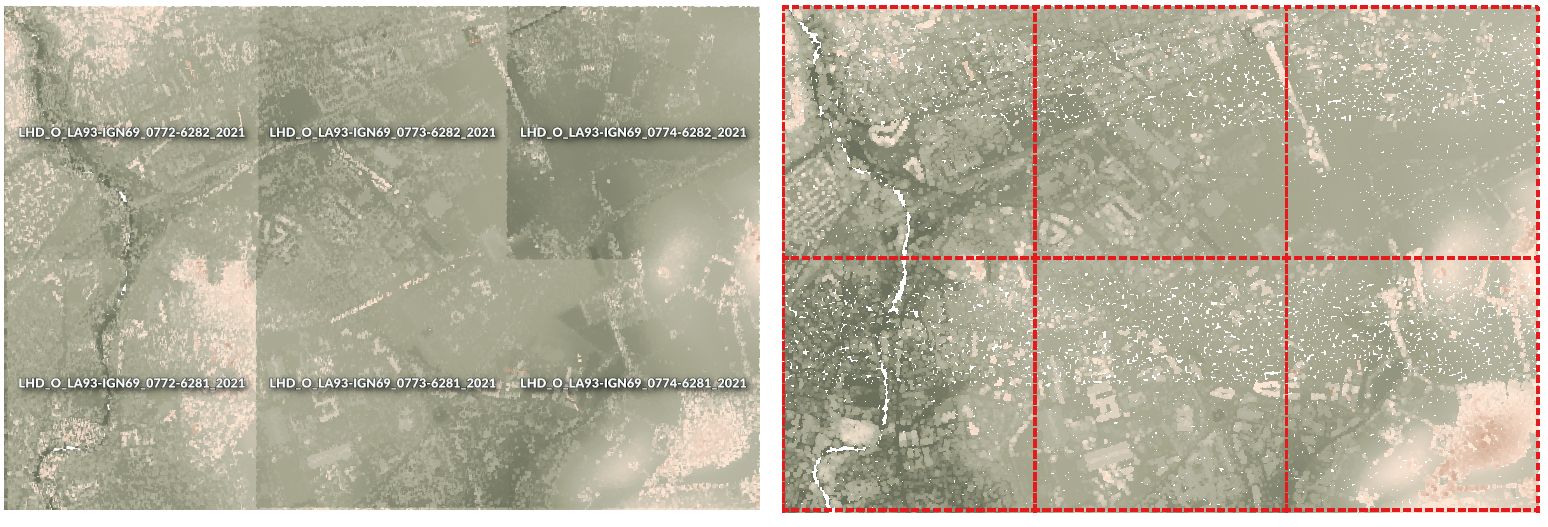
Fig. 28.13 Generating Virtual Point Cloud with overview from a set of point cloud tiles
Ver também
Parâmetros
Etiqueta |
Nome |
Tipo |
Descrição |
|---|---|---|---|
Camadas de entrada* |
|
[point cloud] [list] |
Input point cloud layers to combine inside a virtual point cloud layer |
Calculate boundary polygon |
|
[boleano] Padrão: Falso |
Set to True to show the exact boundaries of data (rather than just rectangular extent) |
Calculate statistics |
|
[boleano] Padrão: Falso |
Set to True to understand ranges of values of the various attributes |
Build overview point cloud |
|
[boleano] Padrão: Falso |
Generates a single “thinned” point cloud of all the input data (using only every 1000th point from original data). The overview point cloud will be created next to the VPC file -
for example, for |
Virtual point cloud |
|
[point cloud] Padrão: |
Specify the point cloud file to build the data into. One of:
|
Saídas
Etiqueta |
Nome |
Tipo |
Descrição |
|---|---|---|---|
Virtual point cloud |
|
[raster] |
Output point cloud layer combining all the input data, as a virtual file. |
Código Python
Algorithm ID: pdal:virtualpointcloud
import processing
processing.run("algorithm_id", {parameter_dictionary})
O id do algoritmo é exibido quando você passa o mouse sobre o algoritmo na Caixa de ferramentas de processamento. O dicionário de parâmetros fornece os nomes e valores dos parâmetros. Veja Usando os algoritmos do processamento a partir do Terminal Python. para detalhes sobre como executar algoritmos de processamento a partir do console Python.
28.1.13.3. Clip
Clips a point cloud layer by a polygon layer so that the resulting point cloud contains only points within the polygons.
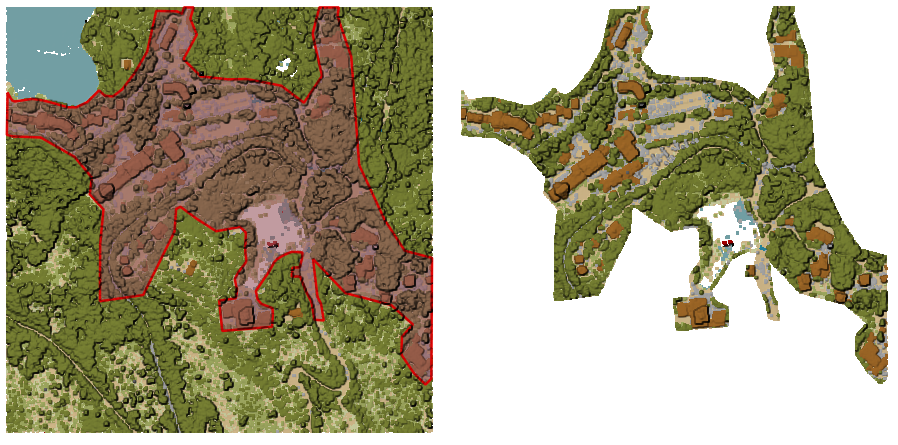
Fig. 28.14 Clipping an input point cloud layer with a polygon coverage
Parâmetros
Parâmetros básicos
Etiqueta |
Nome |
Tipo |
Descrição |
|---|---|---|---|
Camada de entrada |
|
[point cloud] |
Input point cloud layer to clip |
Clipping polygons |
|
[vetor: polígono] |
Polygon vector layer to use as coverage for clipping the points |
Clipped |
|
[point cloud] Padrão: |
Specify the point cloud file to export the clipped points to. One of:
|
Parâmetros avançados
Etiqueta |
Nome |
Tipo |
Descrição |
|---|---|---|---|
Expressão do filtro Opcional |
|
[expressão] |
A PDAL expression for selecting a subset of features in the point cloud data |
Cropping extent Opcional |
|
[extensão] |
A map extent for selecting a subset of features in the point cloud data Os métodos disponíveis são:
|
Saídas
Etiqueta |
Nome |
Tipo |
Descrição |
|---|---|---|---|
Clipped |
|
[raster] |
Output point cloud whose features are the points within the coverage polygon layer. |
Código Python
Algorithm ID: pdal:clip
import processing
processing.run("algorithm_id", {parameter_dictionary})
O id do algoritmo é exibido quando você passa o mouse sobre o algoritmo na Caixa de ferramentas de processamento. O dicionário de parâmetros fornece os nomes e valores dos parâmetros. Veja Usando os algoritmos do processamento a partir do Terminal Python. para detalhes sobre como executar algoritmos de processamento a partir do console Python.
28.1.13.4. Create COPC
Creates the index for all the input point cloud files in a batch mode.
Parâmetros
Etiqueta |
Nome |
Tipo |
Descrição |
|---|---|---|---|
Camadas de entrada* |
|
[point cloud] [list] |
Input point cloud layers to create an index for |
Diretório de saída Opcional |
|
[pasta] Default: |
Specify the folder to create the new files in. One of:
|
Saídas
Etiqueta |
Nome |
Tipo |
Descrição |
|---|---|---|---|
Diretório de saída |
|
[pasta] |
Output folder containing point cloud layers with accompanying COPC index files. |
Código Python
Algorithm ID: pdal:createcopc
import processing
processing.run("algorithm_id", {parameter_dictionary})
O id do algoritmo é exibido quando você passa o mouse sobre o algoritmo na Caixa de ferramentas de processamento. O dicionário de parâmetros fornece os nomes e valores dos parâmetros. Veja Usando os algoritmos do processamento a partir do Terminal Python. para detalhes sobre como executar algoritmos de processamento a partir do console Python.
28.1.13.5. Information
Outputs basic metadata from an input point cloud file.
Example of output information:
LAS 1.4
point format 6
count 56736130
scale 0.001 0.001 0.001
offset 431749.999 5440919.999 968.898
extent 431250 5440420 424.266
432249.999 5441419.999 1513.531
crs ETRS89 / UTM zone 34N (N-E) (EPSG:3046) (vertical CRS missing!)
units horizontal=metre vertical=unknown
Attributes:
- X floating 8
- Y floating 8
- Z floating 8
- Intensity unsigned 2
- ReturnNumber unsigned 1
- NumberOfReturns unsigned 1
- ScanDirectionFlag unsigned 1
- EdgeOfFlightLine unsigned 1
- Classification unsigned 1
- ScanAngleRank floating 4
- UserData unsigned 1
- PointSourceId unsigned 2
- GpsTime floating 8
- ScanChannel unsigned 1
- ClassFlags unsigned 1
Parâmetros
Etiqueta |
Nome |
Tipo |
Descrição |
|---|---|---|---|
Camada de entrada |
|
[point cloud] |
Input point cloud layer to extract metadata information from |
Informação da camada |
|
[arquivo] Padrão: |
Specify the file to store the metadata information. One of:
|
Saídas
Etiqueta |
Nome |
Tipo |
Descrição |
|---|---|---|---|
Informação da camada |
|
[vetor] |
|
Código Python
Algorithm ID: pdal:info
import processing
processing.run("algorithm_id", {parameter_dictionary})
O id do algoritmo é exibido quando você passa o mouse sobre o algoritmo na Caixa de ferramentas de processamento. O dicionário de parâmetros fornece os nomes e valores dos parâmetros. Veja Usando os algoritmos do processamento a partir do Terminal Python. para detalhes sobre como executar algoritmos de processamento a partir do console Python.
28.1.13.6. Mesclar
Merges multiple point cloud files into a single one.
Ver também
Parâmetros
Parâmetros básicos
Etiqueta |
Nome |
Tipo |
Descrição |
|---|---|---|---|
Camadas de entrada* |
|
[point cloud] [list] |
Input point cloud layers to merge into a single one |
Mesclado |
|
[point cloud] Padrão: |
Specify the output point cloud merging input files. One of:
|
Parâmetros avançados
Etiqueta |
Nome |
Tipo |
Descrição |
|---|---|---|---|
Expressão do filtro Opcional |
|
[expressão] |
A PDAL expression for selecting a subset of features in the point cloud data |
Cropping extent Opcional |
|
[extensão] |
A map extent for selecting a subset of features in the point cloud data Os métodos disponíveis são:
|
Saídas
Etiqueta |
Nome |
Tipo |
Descrição |
|---|---|---|---|
Mesclado |
|
[point cloud] |
Output point cloud layer merging all the input files. |
Código Python
Algorithm ID: pdal:merge
import processing
processing.run("algorithm_id", {parameter_dictionary})
O id do algoritmo é exibido quando você passa o mouse sobre o algoritmo na Caixa de ferramentas de processamento. O dicionário de parâmetros fornece os nomes e valores dos parâmetros. Veja Usando os algoritmos do processamento a partir do Terminal Python. para detalhes sobre como executar algoritmos de processamento a partir do console Python.
28.1.13.7. Reproject
Reprojects a point cloud to a different Coordinate Reference System (CRS).
Ver também
Parâmetros
Etiqueta |
Nome |
Tipo |
Descrição |
|---|---|---|---|
Camada de entrada |
|
[point cloud] |
Input point cloud layer to reproject to a different CRS |
SRC Alvo |
|
[src] |
The CRS to apply to the layer |
Reprojetado |
|
[point cloud] Padrão: |
Specify the reprojected point cloud file. One of:
|
Parâmetros avançados
Etiqueta |
Nome |
Tipo |
Descrição |
|---|---|---|---|
Coordinate operation Opcional |
|
[datum] |
The datum transformation to use to reproject the data between the origin and target systems. |
Saídas
Etiqueta |
Nome |
Tipo |
Descrição |
|---|---|---|---|
REPROJECTED |
|
[point cloud] |
Output point cloud layer in the target CRS. |
Código Python
Algorithm ID: pdal:reproject
import processing
processing.run("algorithm_id", {parameter_dictionary})
O id do algoritmo é exibido quando você passa o mouse sobre o algoritmo na Caixa de ferramentas de processamento. O dicionário de parâmetros fornece os nomes e valores dos parâmetros. Veja Usando os algoritmos do processamento a partir do Terminal Python. para detalhes sobre como executar algoritmos de processamento a partir do console Python.
28.1.13.8. Thin (by sampling radius)
Creates a thinned version of the point cloud by performing sampling by distance point (reduces the number of points within a certain radius).

Fig. 28.15 Thining point cloud (by sampling radius)
Ver também
Parâmetros
Parâmetros básicos
Etiqueta |
Nome |
Tipo |
Descrição |
|---|---|---|---|
Camada de entrada |
|
[point cloud] |
Input point cloud layer to create a thinned version from |
Sampling radius (in map units) |
|
[número] Padrão: 1,0 |
Distance within which points are sampled to a unique point |
Thinned (by radius) |
|
[point cloud] Padrão: |
Specify the output point cloud with reduced points. One of:
|
Parâmetros avançados
Etiqueta |
Nome |
Tipo |
Descrição |
|---|---|---|---|
Expressão do filtro Opcional |
|
[expressão] |
A PDAL expression for selecting a subset of features in the point cloud data |
Cropping extent Opcional |
|
[extensão] |
A map extent for selecting a subset of features in the point cloud data Os métodos disponíveis são:
|
Saídas
Etiqueta |
Nome |
Tipo |
Descrição |
|---|---|---|---|
Thinned (by radius) |
|
[point cloud] |
Output point cloud layer with reduced points. |
Código Python
Algorithm ID: pdal:thinbyradius
import processing
processing.run("algorithm_id", {parameter_dictionary})
O id do algoritmo é exibido quando você passa o mouse sobre o algoritmo na Caixa de ferramentas de processamento. O dicionário de parâmetros fornece os nomes e valores dos parâmetros. Veja Usando os algoritmos do processamento a partir do Terminal Python. para detalhes sobre como executar algoritmos de processamento a partir do console Python.
28.1.13.9. Thin (by skipping points)
Creates a thinned version of the point cloud by keeping only every N-th point (reduces the number of points by skipping nearby points).
Ver também
Parâmetros
Parâmetros básicos
Etiqueta |
Nome |
Tipo |
Descrição |
|---|---|---|---|
Camada de entrada |
|
[point cloud] |
Input point cloud layer to create a thinned version from |
Number of points to skip |
|
[número] Padrão: 1 |
Keep only every N-th point in the input layer |
Thinned (by decimation) |
|
[point cloud] Padrão: |
Specify the output point cloud with reduced points. One of:
|
Parâmetros avançados
Etiqueta |
Nome |
Tipo |
Descrição |
|---|---|---|---|
Expressão do filtro Opcional |
|
[expressão] |
A PDAL expression for selecting a subset of features in the point cloud data |
Cropping extent Opcional |
|
[extensão] |
A map extent for selecting a subset of features in the point cloud data Os métodos disponíveis são:
|
Saídas
Etiqueta |
Nome |
Tipo |
Descrição |
|---|---|---|---|
Thinned (by decimation) |
|
[point cloud] |
Output point cloud layer with reduced points. |
Código Python
Algorithm ID: pdal:thinbydecimate
import processing
processing.run("algorithm_id", {parameter_dictionary})
O id do algoritmo é exibido quando você passa o mouse sobre o algoritmo na Caixa de ferramentas de processamento. O dicionário de parâmetros fornece os nomes e valores dos parâmetros. Veja Usando os algoritmos do processamento a partir do Terminal Python. para detalhes sobre como executar algoritmos de processamento a partir do console Python.
28.1.13.10. Tile
Creates tiles from input point cloud files, recommended for best performance (in display or analysis) with such datasets in QGIS.
Ver também
Parâmetros
Parâmetros básicos
Etiqueta |
Nome |
Tipo |
Descrição |
|---|---|---|---|
Camadas de entrada* |
|
[point cloud] [list] |
Input point cloud layers to create tiles from |
Tile length |
|
[número] Default: 1000.0 |
Size of the edge of each generated tile |
Diretório de saída |
|
[pasta] Padrão: |
Specify the folder to store the generated tiles. One of:
|
Parâmetros avançados
Etiqueta |
Nome |
Tipo |
Descrição |
|---|---|---|---|
Assign CRS Opcional |
|
[src] |
The CRS to apply to the layer |
Saídas
Etiqueta |
Nome |
Tipo |
Descrição |
|---|---|---|---|
Diretório de saída |
|
[pasta] |
Output folder containing the tiles generated from input files. |
Código Python
Algorithm ID: pdal:tile
import processing
processing.run("algorithm_id", {parameter_dictionary})
O id do algoritmo é exibido quando você passa o mouse sobre o algoritmo na Caixa de ferramentas de processamento. O dicionário de parâmetros fornece os nomes e valores dos parâmetros. Veja Usando os algoritmos do processamento a partir do Terminal Python. para detalhes sobre como executar algoritmos de processamento a partir do console Python.