Wichtig
Übersetzen ist eine Gemeinschaftsleistung Sie können mitmachen. Diese Seite ist aktuell zu 100.00% übersetzt.
28.1.13. Punktwolkendatenverwaltung
NEW in 3.32
Bemerkung
Diese Algorithmen sind nur verfügbar, wenn QGIS die PDAL-Bibliothek Version 2.5.0 oder neuer verwendet.
28.1.13.1. Projektion zuweisen
Weist einem Layer der Punktwolke ein Koordinatenreferenzsystem zu, wenn es fehlt oder falsch ist. Ein neuer Layer wird erstellt.
Siehe auch
Parameter
Bezeichnung |
Name |
Typ |
Beschreibung |
|---|---|---|---|
Eingabelayer |
|
[Punktwolke] |
Punktwolke-Eingabelayer, dem ein KBS zugewiesen werden soll |
Gewünschte KBS |
|
[KBS] |
Das KBS, das auf den Layer angewendet werden soll |
Ausgabelayer |
|
[Punktwolke] Standard: |
Geben Sie die Punktwolken-Datei an, die als Ausgabe verwendet werden soll. Mögliche Optionen:
|
Ausgaben
Bezeichnung |
Name |
Typ |
Beschreibung |
|---|---|---|---|
Konvertiert |
|
[Punktwolke] |
Punktwolken-Ausgabelayer mit dem neuen KBS. Derzeit unterstützte Formate sind |
Pythoncode
Algorithmus-Kennung: pdal:assignprojection
import processing
processing.run("algorithm_id", {parameter_dictionary})
Die Algorithmus-Kennung wird angezeigt, wenn Sie den Mauszeiger über den Algorithmus in der Verarbeitungs-Werkzeugkiste bewegen. Die Parameter-Liste (parameter_dictionary) enthält die Namen und Werte der Parameter. Siehe Verarbeitungs-Algorithmen von der Konsole aus verwenden für Details zur Ausführung von Verarbeitungsalgorithmen über die Python-Konsole.
28.1.13.2. Virtuelle Punktwolke aufbauen (VPC)
Erzeugt eine virtuelle Punktwolke (VPC) aus den eingegebenen Punktwolkendaten.
Wenn Sie die optionalen Parameter nicht aktivieren, wird die VPC-Datei sehr schnell erstellt, da der Algorithmus nur die Metadaten der Eingabedateien liest. Wenn einer der optionalen Parameter gesetzt ist, liest der Algorithmus alle Punkte, was einige Zeit dauern kann.
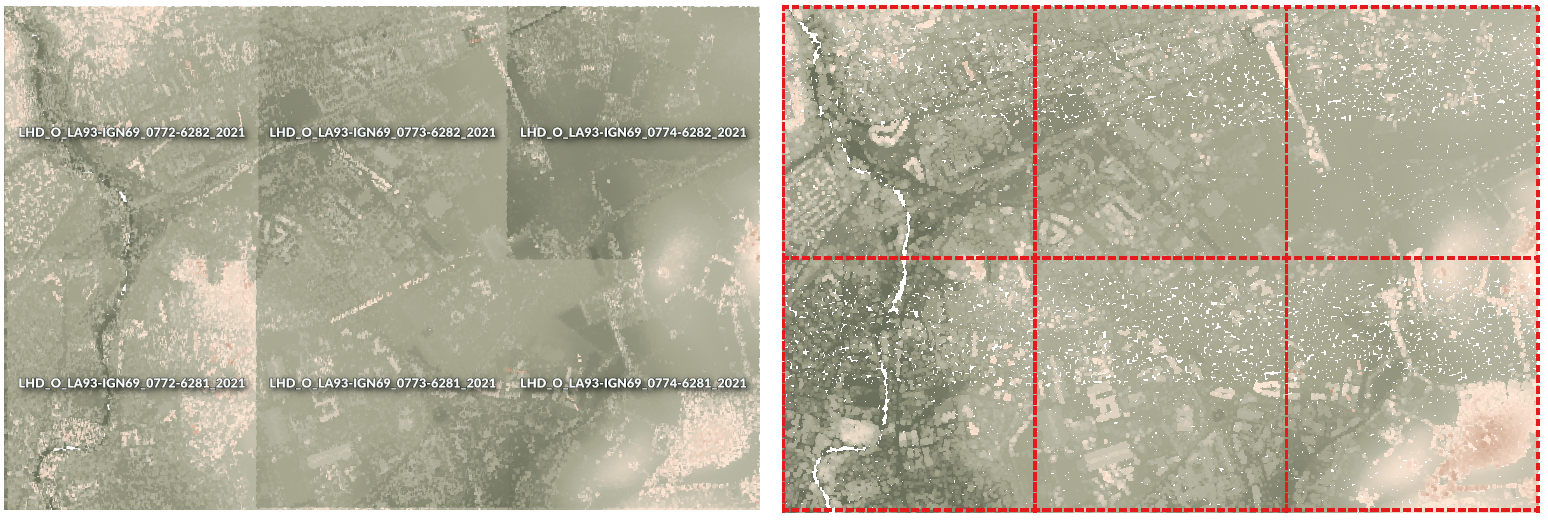
Abb. 28.13 Erzeugung einer virtuellen Punktwolke mit Übersicht aus einem Satz von Punktwolkenkacheln
Siehe auch
Parameter
Bezeichnung |
Name |
Typ |
Beschreibung |
|---|---|---|---|
Eingabelayer |
|
[Punktwolke] [Liste] |
Eingabe von einem oder mehreren Punktwolken-Layern zur Kombination in einem virtuellen Punktwolken-Layer |
Umgrenzungspolygon berechnen |
|
[Boolean] Standard: falsch |
Auf „wahr“ setzen, um die genauen Grenzen der Daten anzuzeigen (und nicht nur die rechteckige Ausdehnung) |
Statistik berechnen |
|
[Boolean] Standard: falsch |
Auf „wahr“ setzen, um die Wertebereiche der verschiedenen Attribute zu ermitteln |
Punktwolkenübersicht aufbauen |
|
[Boolean] Standard: falsch |
Erzeugt eine einzelne „ausgedünnte“ Punktwolke aus allen Eingabedaten (wobei nur jeder 1000ste Punkt der Originaldaten verwendet wird). Die Punktwolkenübersicht wird neben der VPC-Datei erstellt - für |
Virtuelle Punktwolke |
|
[Punktwolke] Standard: |
Geben Sie die Punktwolkendatei an, in der die Daten erstellt werden sollen. Mögliche Optionen:
|
Ausgaben
Bezeichnung |
Name |
Typ |
Beschreibung |
|---|---|---|---|
Virtuelle Punktwolke |
|
[Raster] |
Punktwolken-Ausgabelayer, der alle Eingabedaten in einer virtuellen Datei kombiniert |
Pythoncode
Algorithmus-Kennung: pdal:virtualpointcloud
import processing
processing.run("algorithm_id", {parameter_dictionary})
Die Algorithmus-Kennung wird angezeigt, wenn Sie den Mauszeiger über den Algorithmus in der Verarbeitungs-Werkzeugkiste bewegen. Die Parameter-Liste (parameter_dictionary) enthält die Namen und Werte der Parameter. Siehe Verarbeitungs-Algorithmen von der Konsole aus verwenden für Details zur Ausführung von Verarbeitungsalgorithmen über die Python-Konsole.
28.1.13.3. Zuschneiden
Schneidet einen Punktwolken-Layer durch einen Polygon Layer so aus, dass die resultierende Punktwolke nur Punkte innerhalb der Polygone enthält.
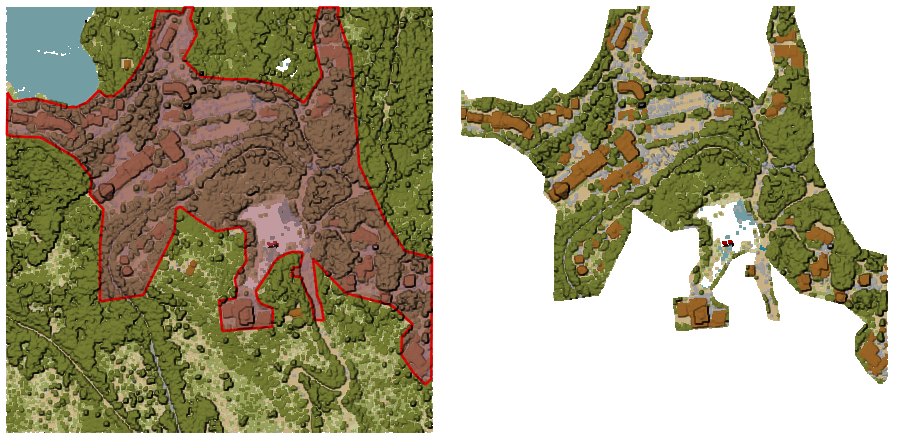
Abb. 28.14 Beschneiden eines Punktwolken-Eingabelayers mit einer Polygonabdeckung
Parameter
Grundlegende Parameter
Bezeichnung |
Name |
Typ |
Beschreibung |
|---|---|---|---|
Eingabelayer |
|
[Punktwolke] |
Punktwolke-Eingabelayer, der ausgeschnitten werden soll |
Begrenzungspolygone |
|
[Vektor: Polygon] |
Polygon-Vektor Layer, der als Abdeckung für das Ausschneiden der Punkte verwendet wird |
Zugeschnitten |
|
[Punktwolke] Standard: |
Geben Sie die Punktwolkendatei an, in die die beschnittenen Punkte exportiert werden sollen. Mögliche Optionen:
|
Fortgeschrittene Parameter
Bezeichnung |
Name |
Typ |
Beschreibung |
|---|---|---|---|
Filterausdruck Optional |
|
[Ausdruck] |
Ein PDAL-Ausdruck zur Auswahl einer Untergruppe von Objekten in den Punktwolkendaten |
Begrenzungsausmaß Optional |
|
[Ausdehnung] |
Ein Kartenausschnitt zur Auswahl einer Teilmenge von Objekten in den Punktwolkendaten Verfügbare Methoden sind:
|
Ausgaben
Bezeichnung |
Name |
Typ |
Beschreibung |
|---|---|---|---|
Zugeschnitten |
|
[Raster] |
Punktwolke-Ausgabelayer, deren Objekte die Punkte innerhalb des Polygon-Abdeckungslayers sind. |
Pythoncode
Algorithmus-Kennung: pdal:clip
import processing
processing.run("algorithm_id", {parameter_dictionary})
Die Algorithmus-Kennung wird angezeigt, wenn Sie den Mauszeiger über den Algorithmus in der Verarbeitungs-Werkzeugkiste bewegen. Die Parameter-Liste (parameter_dictionary) enthält die Namen und Werte der Parameter. Siehe Verarbeitungs-Algorithmen von der Konsole aus verwenden für Details zur Ausführung von Verarbeitungsalgorithmen über die Python-Konsole.
28.1.13.4. COPC erzeugen
Erzeugt einen Index (COPC-Datei) für alle eingegebenen Punktwolkendateien im Stapelverarbeitungs-Modus.
Parameter
Bezeichnung |
Name |
Typ |
Beschreibung |
|---|---|---|---|
Eingabelayer |
|
[Punktwolke] [Liste] |
Ein oder mehrere Punktwolke-Eingabelayer, für die ein Index erstellt werden soll |
Ausgabeverzeichnis Optional |
|
[Verzeichnis] Standard: |
Geben Sie den Ordner an, in dem die neuen Dateien erstellt werden sollen. Mögliche Optionen:
|
Ausgaben
Bezeichnung |
Name |
Typ |
Beschreibung |
|---|---|---|---|
Ausgabeverzeichnis |
|
[Verzeichnis] |
Ausgabeordner mit Punktwolken-Layern und zugehörigen COPC-Indexdateien. |
Pythoncode
Algorithmus-Kennung: pdal:createcopc
import processing
processing.run("algorithm_id", {parameter_dictionary})
Die Algorithmus-Kennung wird angezeigt, wenn Sie den Mauszeiger über den Algorithmus in der Verarbeitungs-Werkzeugkiste bewegen. Die Parameter-Liste (parameter_dictionary) enthält die Namen und Werte der Parameter. Siehe Verarbeitungs-Algorithmen von der Konsole aus verwenden für Details zur Ausführung von Verarbeitungsalgorithmen über die Python-Konsole.
28.1.13.5. Information
Gibt grundlegende Metadaten aus einer Punktwolken-Eingabedatei aus.
Beispiel für die Ausgabe von Informationen:
LAS 1.4
point format 6
count 56736130
scale 0.001 0.001 0.001
offset 431749.999 5440919.999 968.898
extent 431250 5440420 424.266
432249.999 5441419.999 1513.531
crs ETRS89 / UTM zone 34N (N-E) (EPSG:3046) (vertical CRS missing!)
units horizontal=metre vertical=unknown
Attributes:
- X floating 8
- Y floating 8
- Z floating 8
- Intensity unsigned 2
- ReturnNumber unsigned 1
- NumberOfReturns unsigned 1
- ScanDirectionFlag unsigned 1
- EdgeOfFlightLine unsigned 1
- Classification unsigned 1
- ScanAngleRank floating 4
- UserData unsigned 1
- PointSourceId unsigned 2
- GpsTime floating 8
- ScanChannel unsigned 1
- ClassFlags unsigned 1
Parameter
Bezeichnung |
Name |
Typ |
Beschreibung |
|---|---|---|---|
Eingabelayer |
|
[Punktwolke] |
Punktwolke-Eingabelayer, aus dem die Metadateninformationen ausgelesen werden sollen |
Layer Information |
|
[Datei] Standard: |
Geben Sie die Datei an, in der die Metadateninformationen gespeichert werden sollen. Mögliche Optionen:
|
Ausgaben
Bezeichnung |
Name |
Typ |
Beschreibung |
|---|---|---|---|
Layer Information |
|
[Vektor] |
|
Pythoncode
Algorithmus-Kennung: pdal:info
import processing
processing.run("algorithm_id", {parameter_dictionary})
Die Algorithmus-Kennung wird angezeigt, wenn Sie den Mauszeiger über den Algorithmus in der Verarbeitungs-Werkzeugkiste bewegen. Die Parameter-Liste (parameter_dictionary) enthält die Namen und Werte der Parameter. Siehe Verarbeitungs-Algorithmen von der Konsole aus verwenden für Details zur Ausführung von Verarbeitungsalgorithmen über die Python-Konsole.
28.1.13.6. Vereinigen
Führt mehrere Punktwolkendateien zu einer einzigen zusammen.
Siehe auch
Parameter
Grundlegende Parameter
Bezeichnung |
Name |
Typ |
Beschreibung |
|---|---|---|---|
Eingabelayer |
|
[Punktwolke] [Liste] |
Punktwolke-Eingabelayer, die zu einer einzigen zusammengeführt werden sollen |
Zusammengeführt |
|
[Punktwolke] Standard: |
Geben Sie die Eingabedateien für die Zusammenführung von Punktwolken an. Mögliche Optionen:
|
Fortgeschrittene Parameter
Bezeichnung |
Name |
Typ |
Beschreibung |
|---|---|---|---|
Filterausdruck Optional |
|
[Ausdruck] |
Ein PDAL-Ausdruck zur Auswahl einer Untergruppe von Objekten in den Punktwolkendaten |
Begrenzungsausmaß Optional |
|
[Ausdehnung] |
Ein Kartenausschnitt zur Auswahl einer Teilmenge von Objekten in den Punktwolkendaten Verfügbare Methoden sind:
|
Ausgaben
Bezeichnung |
Name |
Typ |
Beschreibung |
|---|---|---|---|
Zusammengeführt |
|
[Punktwolke] |
Punktwolke-Ausgabelayer, der alle Eingabedateien zusammenfasst. |
Pythoncode
Algorithmus-Kennung: pdal:merge
import processing
processing.run("algorithm_id", {parameter_dictionary})
Die Algorithmus-Kennung wird angezeigt, wenn Sie den Mauszeiger über den Algorithmus in der Verarbeitungs-Werkzeugkiste bewegen. Die Parameter-Liste (parameter_dictionary) enthält die Namen und Werte der Parameter. Siehe Verarbeitungs-Algorithmen von der Konsole aus verwenden für Details zur Ausführung von Verarbeitungsalgorithmen über die Python-Konsole.
28.1.13.7. Reprojizieren
Reprojiziert eine Punktwolke auf ein anderes Koordinatenreferenzsystem (KBS).
Siehe auch
Parameter
Bezeichnung |
Name |
Typ |
Beschreibung |
|---|---|---|---|
Eingabelayer |
|
[Punktwolke] |
Punktwolke-Eingabelayer, der in ein anderes KBS neu projizieren werden soll |
Ziel KBS |
|
[KBS] |
Das KBS, das auf den Layer angewendet werden soll |
Reprojiziert |
|
[Punktwolke] Standard: |
Geben Sie die reprojizierte Punktwolkendatei an. Mögliche Optionen:
|
Fortgeschrittene Parameter
Bezeichnung |
Name |
Typ |
Beschreibung |
|---|---|---|---|
Koordinatenoperation Optional |
|
[Datum] |
Die Datumstransformation, die zur Reprojektion der Daten zwischen dem Ursprungs- und dem Zielsystem verwendet werden soll. |
Ausgaben
Bezeichnung |
Name |
Typ |
Beschreibung |
|---|---|---|---|
Reprojiziert |
|
[Punktwolke] |
Punktwolke-Ausgabelayer im Ziel-KBS. |
Pythoncode
Algorithmus-Kennung: pdal:reproject
import processing
processing.run("algorithm_id", {parameter_dictionary})
Die Algorithmus-Kennung wird angezeigt, wenn Sie den Mauszeiger über den Algorithmus in der Verarbeitungs-Werkzeugkiste bewegen. Die Parameter-Liste (parameter_dictionary) enthält die Namen und Werte der Parameter. Siehe Verarbeitungs-Algorithmen von der Konsole aus verwenden für Details zur Ausführung von Verarbeitungsalgorithmen über die Python-Konsole.
28.1.13.8. Dünn (durch Abtastradius)
Erzeugt eine ausgedünnte Version der Punktwolke, indem eine Stichprobe nach Abstandspunkten durchgeführt wird (reduziert die Anzahl der Punkte innerhalb eines bestimmten Radius).

Abb. 28.15 Ausdünnen einer Punktwolke (nach Abtastradius)
Siehe auch
Parameter
Grundlegende Parameter
Bezeichnung |
Name |
Typ |
Beschreibung |
|---|---|---|---|
Eingabelayer |
|
[Punktwolke] |
Punktwolke-Eingabelayer, von dem eine ausgedünnte Version erstellt werden soll |
Abtastradius (in Karteneinheiten) |
|
[Zahl] Standard: 1,0 |
Abstand, innerhalb dessen Punkte zu einem einzelnen Punkt abgetastet werden |
Ausgedünnt (durch Radius) |
|
[Punktwolke] Standard: |
Geben Sie die Ausgabepunktwolke mit reduzierter Punktanzahl an. Mögliche Optionen:
|
Fortgeschrittene Parameter
Bezeichnung |
Name |
Typ |
Beschreibung |
|---|---|---|---|
Filterausdruck Optional |
|
[Ausdruck] |
Ein PDAL-Ausdruck zur Auswahl einer Untergruppe von Objekten in den Punktwolkendaten |
Begrenzungsausmaß Optional |
|
[Ausdehnung] |
Ein Kartenausschnitt zur Auswahl einer Teilmenge von Objekten in den Punktwolkendaten Verfügbare Methoden sind:
|
Ausgaben
Bezeichnung |
Name |
Typ |
Beschreibung |
|---|---|---|---|
Ausgedünnt (durch Radius) |
|
[Punktwolke] |
Punktwolke-Ausgabedatei mit reduzierten Punkten. |
Pythoncode
Algorithmus-Kennung: pdal:thinbyradius
import processing
processing.run("algorithm_id", {parameter_dictionary})
Die Algorithmus-Kennung wird angezeigt, wenn Sie den Mauszeiger über den Algorithmus in der Verarbeitungs-Werkzeugkiste bewegen. Die Parameter-Liste (parameter_dictionary) enthält die Namen und Werte der Parameter. Siehe Verarbeitungs-Algorithmen von der Konsole aus verwenden für Details zur Ausführung von Verarbeitungsalgorithmen über die Python-Konsole.
28.1.13.9. Dünn (durch Auslassen von Punkten)
Erzeugt eine ausgedünnte Version der Punktwolke, indem nur jeder N-te Punkt beibehalten wird (reduziert die Anzahl der Punkte, indem nahe gelegene Punkte ausgelassen werden).
Siehe auch
Parameter
Grundlegende Parameter
Bezeichnung |
Name |
Typ |
Beschreibung |
|---|---|---|---|
Eingabelayer |
|
[Punktwolke] |
Punktwolke-Eingabelayer, von dem eine ausgedünnte Version erstellt werden soll |
Anzahl der zu überspringenden Punkte |
|
[Zahl] Standard: 1 |
Behält nur jeden N-ten Punkt aus dem Eingabelayer |
Ausgedünnt (durch Dezimierung) |
|
[Punktwolke] Standard: |
Geben Sie die Ausgabepunktwolke mit reduzierter Punktanzahl an. Mögliche Optionen:
|
Fortgeschrittene Parameter
Bezeichnung |
Name |
Typ |
Beschreibung |
|---|---|---|---|
Filterausdruck Optional |
|
[Ausdruck] |
Ein PDAL-Ausdruck zur Auswahl einer Untergruppe von Objekten in den Punktwolkendaten |
Begrenzungsausmaß Optional |
|
[Ausdehnung] |
Ein Kartenausschnitt zur Auswahl einer Teilmenge von Objekten in den Punktwolkendaten Verfügbare Methoden sind:
|
Ausgaben
Bezeichnung |
Name |
Typ |
Beschreibung |
|---|---|---|---|
Ausgedünnt (durch Dezimierung) |
|
[Punktwolke] |
Punktwolke-Ausgabedatei mit reduzierten Punkten. |
Pythoncode
Algorithmus-Kennung: pdal:thinbydecimate
import processing
processing.run("algorithm_id", {parameter_dictionary})
Die Algorithmus-Kennung wird angezeigt, wenn Sie den Mauszeiger über den Algorithmus in der Verarbeitungs-Werkzeugkiste bewegen. Die Parameter-Liste (parameter_dictionary) enthält die Namen und Werte der Parameter. Siehe Verarbeitungs-Algorithmen von der Konsole aus verwenden für Details zur Ausführung von Verarbeitungsalgorithmen über die Python-Konsole.
28.1.13.10. Kacheln
Erzeugt Kacheln aus den eingegebenen Punktwolkendateien; dies ist die Empfehlung für die beste Leistung (bei der Anzeige oder Analyse) mit solchen Datensätzen in QGIS.
Siehe auch
Parameter
Grundlegende Parameter
Bezeichnung |
Name |
Typ |
Beschreibung |
|---|---|---|---|
Eingabelayer |
|
[Punktwolke] [Liste] |
Ein oder mehrere Punktwolke-Eingabelayer, aus denen Kacheln erstellt werden sollen |
Kachellänge |
|
[Zahl] Standard: 1000,0 |
Größe des Randes jeder erzeugten Kachel |
Ausgabeverzeichnis |
|
[Verzeichnis] Standard: |
Geben Sie den Ordner an, in dem die generierten Kacheln gespeichert werden sollen. Mögliche Optionen:
|
Fortgeschrittene Parameter
Bezeichnung |
Name |
Typ |
Beschreibung |
|---|---|---|---|
KBS zuweisen Optional |
|
[KBS] |
Das KBS, das auf den Layer angewendet werden soll |
Ausgaben
Bezeichnung |
Name |
Typ |
Beschreibung |
|---|---|---|---|
Ausgabeverzeichnis |
|
[Verzeichnis] |
Ausgabeordner, der die aus den Eingabedateien erzeugten Kacheln enthält. |
Pythoncode
Algorithmus-Kennung: pdal:tile
import processing
processing.run("algorithm_id", {parameter_dictionary})
Die Algorithmus-Kennung wird angezeigt, wenn Sie den Mauszeiger über den Algorithmus in der Verarbeitungs-Werkzeugkiste bewegen. Die Parameter-Liste (parameter_dictionary) enthält die Namen und Werte der Parameter. Siehe Verarbeitungs-Algorithmen von der Konsole aus verwenden für Details zur Ausführung von Verarbeitungsalgorithmen über die Python-Konsole.