Wichtig
Übersetzen ist eine Gemeinschaftsleistung Sie können mitmachen. Diese Seite ist aktuell zu 84.57% übersetzt.
28.1.14. Point Cloud Extraction
NEW in 3.32
Bemerkung
Diese Algorithmen sind nur verfügbar, wenn QGIS die PDAL-Bibliothek Version 2.5.0 oder neuer verwendet.
28.1.14.1. Boundary
Exports a polygon file containing point cloud layer boundary. It may contain holes and it may be a multi-part polygon.
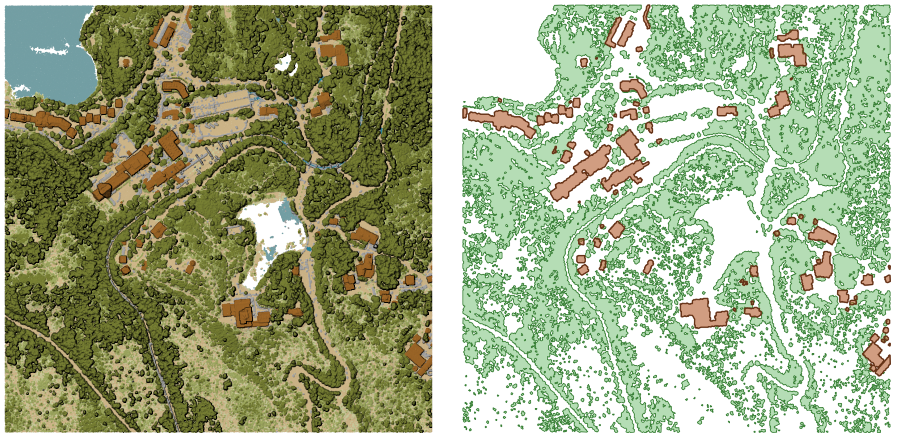
Abb. 28.16 Extracting high vegetation and building polygons from an input point cloud layer
Parameter
Grundlegende Parameter
Bezeichnung |
Name |
Typ |
Beschreibung |
|---|---|---|---|
Eingabe-Layer |
|
[Punktwolke] |
Input point cloud layer to calculate boundary for |
Resolution of cells used to calculate boundary Optional |
|
[Zahl] |
Resolution of cells used to calculate boundary |
Minimal number of points in a cell to consider cell occupied Optional |
|
[Zahl] |
Minimal number of points in a cell to consider cell occupied |
Boundary |
|
[Vektor: Polygon] Standard: |
Geben Sie die Punktwolken-Datei an, die als Ausgabe verwendet werden soll. Mögliche Optionen:
|
Fortgeschrittene Parameter
Bezeichnung |
Name |
Typ |
Beschreibung |
|---|---|---|---|
Filterausdruck Optional |
|
[Ausdruck] |
Ein PDAL-Ausdruck zur Auswahl einer Untergruppe von Objekten in den Punktwolkendaten |
Begrenzungsausmaß Optional |
|
[Ausdehnung] |
Ein Kartenausschnitt zur Auswahl einer Teilmenge von Objekten in den Punktwolkendaten Verfügbare Methoden sind:
|
Ausgaben
Bezeichnung |
Name |
Typ |
Beschreibung |
|---|---|---|---|
Boundary |
|
[Vektor: Polygon] |
Output polygon vector layer with the point cloud boundary.
Currently supported format is |
Pythoncode
Algorithm ID: pdal:boundary
import processing
processing.run("algorithm_id", {parameter_dictionary})
Die Algorithmus-Kennung wird angezeigt, wenn Sie den Mauszeiger über den Algorithmus in der Verarbeitungs-Werkzeugkiste bewegen. Die Parameter-Liste (parameter_dictionary) enthält die Namen und Werte der Parameter. Siehe Verarbeitungs-Algorithmen von der Konsole aus verwenden für Details zur Ausführung von Verarbeitungsalgorithmen über die Python-Konsole.
28.1.14.2. Density
Exports a raster file based on the number of points within each raster cell - useful for quality checking of point cloud datasets.
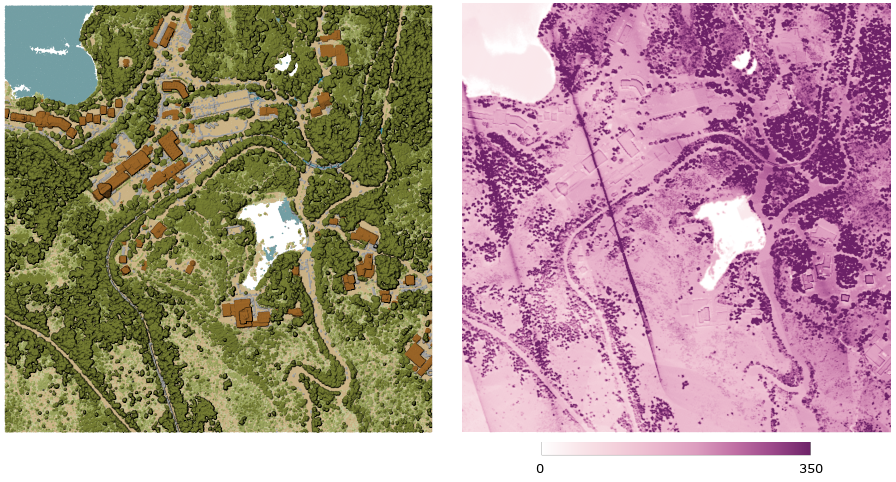
Abb. 28.17 Point density (number of points per 2x2 m) as a raster
Parameter
Grundlegende Parameter
Bezeichnung |
Name |
Typ |
Beschreibung |
|---|---|---|---|
Eingabe-Layer |
|
[Punktwolke] |
Layer der zu exportierenden Punktwolke |
Auflösung des Rasters |
|
[Zahl] Standard: 1.0 |
Zellengröße des Ausgaberasters |
Kachelgröße für parallele Durchläufe |
|
[Zahl] Standard: 1000 |
Size of the tiles to split the data into for parallel runs |
Density |
|
[Raster] Standard: |
Geben Sie die Rasterdatei an, in die die Daten exportiert werden sollen. Mögliche Optionen:
|
Fortgeschrittene Parameter
Bezeichnung |
Name |
Typ |
Beschreibung |
|---|---|---|---|
Filterausdruck Optional |
|
[Ausdruck] |
Ein PDAL-Ausdruck zur Auswahl einer Untergruppe von Objekten in den Punktwolkendaten |
Begrenzungsausmaß Optional |
|
[Ausdehnung] |
Ein Kartenausschnitt zur Auswahl einer Teilmenge von Objekten in den Punktwolkendaten Verfügbare Methoden sind:
|
X-Ursprung einer Kachel für parallele Läufe Optional |
|
[Zahl] |
|
Y-Ursprung einer Kachel für parallele Läufe Optional |
|
[Zahl] |
Ausgaben
Bezeichnung |
Name |
Typ |
Beschreibung |
|---|---|---|---|
Density |
|
[Raster] |
Output raster layer with number of points within each cell.
Currently supported format is |
Pythoncode
Algorithm ID: pdal:density
import processing
processing.run("algorithm_id", {parameter_dictionary})
Die Algorithmus-Kennung wird angezeigt, wenn Sie den Mauszeiger über den Algorithmus in der Verarbeitungs-Werkzeugkiste bewegen. Die Parameter-Liste (parameter_dictionary) enthält die Namen und Werte der Parameter. Siehe Verarbeitungs-Algorithmen von der Konsole aus verwenden für Details zur Ausführung von Verarbeitungsalgorithmen über die Python-Konsole.
28.1.14.3. Filter
Extracts point from the input point cloud which match PDAL expression and/or are inside of a cropping rectangle.
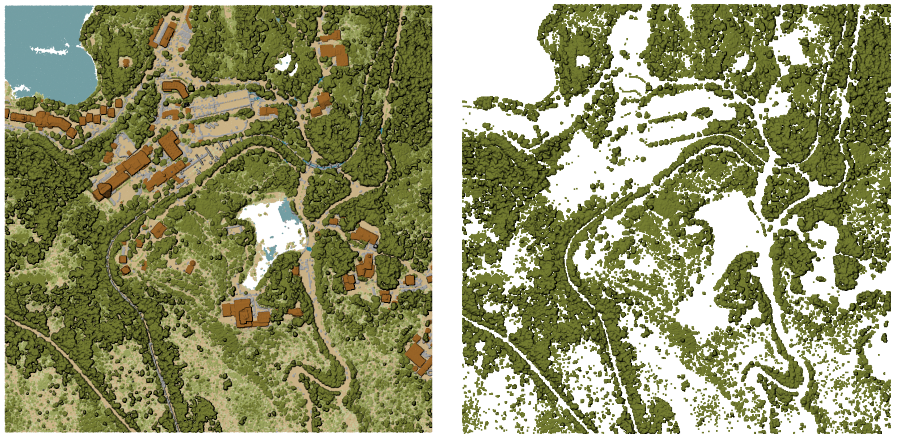
Abb. 28.18 Filtering of high vegetation class from an input point cloud layer
Parameter
Bezeichnung |
Name |
Typ |
Beschreibung |
|---|---|---|---|
Eingabe-Layer |
|
[Punktwolke] |
Layer der zu exportierenden Punktwolke |
Filterausdruck Optional |
|
[Ausdruck] |
Ein PDAL-Ausdruck zur Auswahl einer Untergruppe von Objekten in den Punktwolkendaten |
Begrenzungsausmaß Optional |
|
[Ausdehnung] |
Ein Kartenausschnitt zur Auswahl einer Teilmenge von Objekten in den Punktwolkendaten Verfügbare Methoden sind:
|
Filtered |
|
[Punktwolke] Standard: |
Specify the point cloud file to export the data to. One of:
|
Ausgaben
Bezeichnung |
Name |
Typ |
Beschreibung |
|---|---|---|---|
Filtered |
|
[Punktwolke] |
Output point cloud layer with the filtered features of the input point cloud layer.
Currently supported formats are |
Pythoncode
Algorithm ID: pdal:filter
import processing
processing.run("algorithm_id", {parameter_dictionary})
Die Algorithmus-Kennung wird angezeigt, wenn Sie den Mauszeiger über den Algorithmus in der Verarbeitungs-Werkzeugkiste bewegen. Die Parameter-Liste (parameter_dictionary) enthält die Namen und Werte der Parameter. Siehe Verarbeitungs-Algorithmen von der Konsole aus verwenden für Details zur Ausführung von Verarbeitungsalgorithmen über die Python-Konsole.