Importante
A tradução é um esforço comunitário você pode contribuir. Esta página está atualmente traduzida em 29.26%.
28.1.14. Point Cloud Extraction
NEW in 3.32
Nota
These algorithms are only available if QGIS uses the PDAL library version 2.5.0 or newer.
28.1.14.1. Boundary
Exports a polygon file containing point cloud layer boundary. It may contain holes and it may be a multi-part polygon.
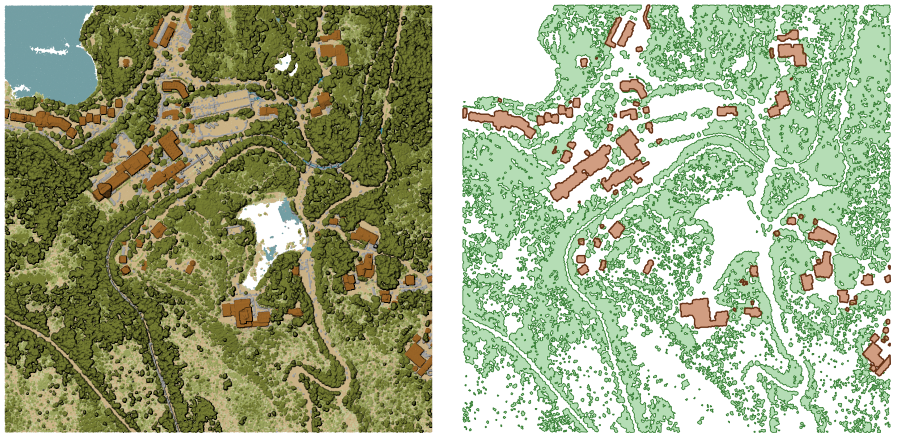
Fig. 28.16 Extracting high vegetation and building polygons from an input point cloud layer
Parâmetros
Basic parameters
Label |
Nome |
Type |
Descrição |
|---|---|---|---|
Input layer |
|
[point cloud] |
Input point cloud layer to calculate boundary for |
Resolution of cells used to calculate boundary Opcional |
|
[number] |
Resolution of cells used to calculate boundary |
Minimal number of points in a cell to consider cell occupied Opcional |
|
[number] |
Minimal number of points in a cell to consider cell occupied |
Boundary |
|
[vector: polygon] Default: |
Specify the point cloud file to use as output. One of:
|
Advanced parameters
Label |
Nome |
Type |
Descrição |
|---|---|---|---|
Filter expression Opcional |
|
[expression] |
A PDAL expression for selecting a subset of features in the point cloud data |
Cropping extent Opcional |
|
[extent] |
A map extent for selecting a subset of features in the point cloud data Available methods are:
|
Resultados
Label |
Nome |
Type |
Descrição |
|---|---|---|---|
Boundary |
|
[vector: polygon] |
Output polygon vector layer with the point cloud boundary.
Currently supported format is |
Python code
Algorithm ID: pdal:boundary
import processing
processing.run("algorithm_id", {parameter_dictionary})
The algorithm id is displayed when you hover over the algorithm in the Processing Toolbox. The parameter dictionary provides the parameter NAMEs and values. See Usando os algoritmos do processamento a partir da consola for details on how to run processing algorithms from the Python console.
28.1.14.2. Density
Exports a raster file based on the number of points within each raster cell - useful for quality checking of point cloud datasets.
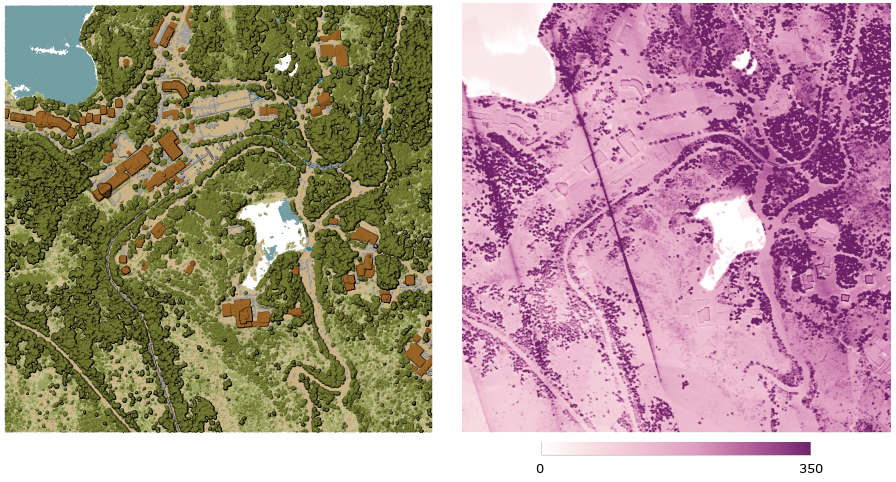
Fig. 28.17 Point density (number of points per 2x2 m) as a raster
Parâmetros
Basic parameters
Label |
Nome |
Type |
Descrição |
|---|---|---|---|
Input layer |
|
[point cloud] |
Input point cloud layer to export |
Resolution of the density raster |
|
[number] Default: 1.0 |
Cell size of the output raster |
Tile size for parallel runs |
|
[number] Default: 1000 |
Size of the tiles to split the data into for parallel runs |
Density |
|
[raster] Default: |
Specify the raster file to export the data to. One of:
|
Advanced parameters
Label |
Nome |
Type |
Descrição |
|---|---|---|---|
Filter expression Opcional |
|
[expression] |
A PDAL expression for selecting a subset of features in the point cloud data |
Cropping extent Opcional |
|
[extent] |
A map extent for selecting a subset of features in the point cloud data Available methods are:
|
X origin of a tile for parallel runs Opcional |
|
[number] |
|
Y origin of a tile for parallel runs Opcional |
|
[number] |
Resultados
Label |
Nome |
Type |
Descrição |
|---|---|---|---|
Density |
|
[raster] |
Output raster layer with number of points within each cell.
Currently supported format is |
Python code
Algorithm ID: pdal:density
import processing
processing.run("algorithm_id", {parameter_dictionary})
The algorithm id is displayed when you hover over the algorithm in the Processing Toolbox. The parameter dictionary provides the parameter NAMEs and values. See Usando os algoritmos do processamento a partir da consola for details on how to run processing algorithms from the Python console.
28.1.14.3. Filter
Extracts point from the input point cloud which match PDAL expression and/or are inside of a cropping rectangle.
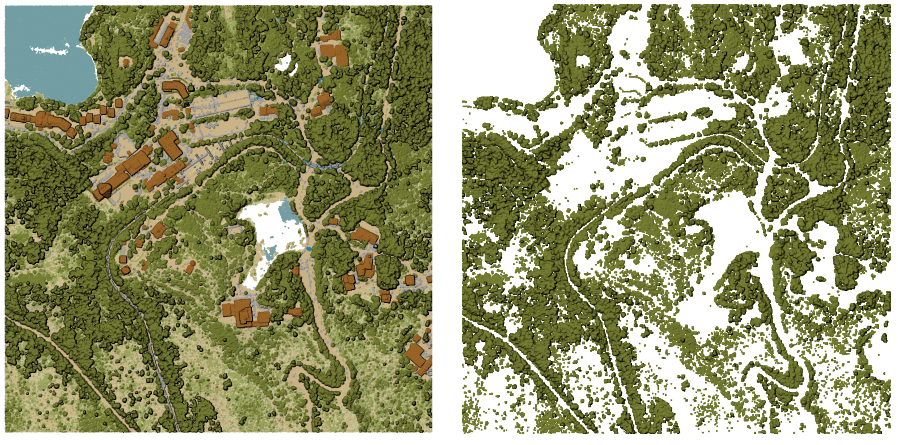
Fig. 28.18 Filtering of high vegetation class from an input point cloud layer
Parâmetros
Label |
Nome |
Type |
Descrição |
|---|---|---|---|
Input layer |
|
[point cloud] |
Input point cloud layer to export |
Filter expression Opcional |
|
[expression] |
A PDAL expression for selecting a subset of features in the point cloud data |
Cropping extent Opcional |
|
[extent] |
A map extent for selecting a subset of features in the point cloud data Available methods are:
|
Filtered |
|
[point cloud] Default: |
Specify the point cloud file to export the data to. One of:
|
Resultados
Label |
Nome |
Type |
Descrição |
|---|---|---|---|
Filtered |
|
[point cloud] |
Output point cloud layer with the filtered features of the input point cloud layer.
Currently supported formats are |
Python code
Algorithm ID: pdal:filter
import processing
processing.run("algorithm_id", {parameter_dictionary})
The algorithm id is displayed when you hover over the algorithm in the Processing Toolbox. The parameter dictionary provides the parameter NAMEs and values. See Usando os algoritmos do processamento a partir da consola for details on how to run processing algorithms from the Python console.