Important
La traduction est le fruit d’un effort communautaire auquel vous pouvez vous joindre. Cette page est actuellement traduite à 88.30%.
28.1.14. Extraction de nuages de points
NEW in 3.32
Note
Ces algorithmes ne sont disponibles que dans des versions de QGIS utilisant la version 2.5.0 ou ultérieure de la bibliothèque PDAL.
28.1.14.1. Limite
Exports a polygon file containing point cloud layer boundary. It may contain holes and it may be a multi-part polygon.
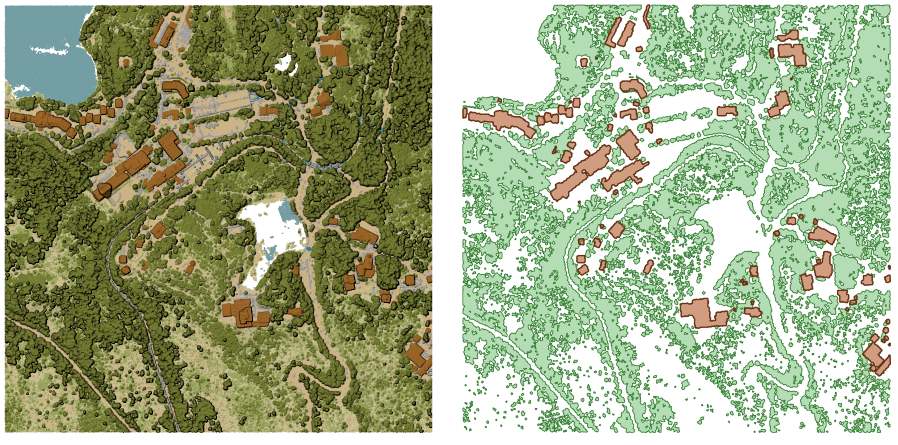
Fig. 28.16 Extracting high vegetation and building polygons from an input point cloud layer
Paramètres
Paramètres basiques
Etiquette |
Nom |
Type |
Description |
|---|---|---|---|
Couche en entrée |
|
[nuage de points] |
Couche de nuage de points en entrée dont il faut calculer les limites |
Resolution of cells used to calculate boundary Optionnel |
|
[number] |
Resolution of cells used to calculate boundary |
Minimal number of points in a cell to consider cell occupied Optionnel |
|
[number] |
Minimal number of points in a cell to consider cell occupied |
limite |
|
[vecteur : polygone] Par défaut : |
Indiquez le fichier de nuage de points à utiliser en sortie. Il peut être :
|
Paramètres avancés
Etiquette |
Nom |
Type |
Description |
|---|---|---|---|
Expression de filtre Optionnel |
|
[expression] |
Une expression PDAL permettant la sélection d’un ensemble d’entités dans les données de nuage de points |
Cropping extent Optionnel |
|
[emprise] |
A map extent for selecting a subset of features in the point cloud data Les méthodes disponibles sont:
|
Les sorties
Etiquette |
Nom |
Type |
Description |
|---|---|---|---|
limite |
|
[vecteur : polygone] |
Output polygon vector layer with the point cloud boundary.
Currently supported format is |
Code Python
ID de l’algorithme : pdal:boundary
import processing
processing.run("algorithm_id", {parameter_dictionary})
L”id de l’algorithme est affiché lors du survol du nom de l’algorithme dans la boîte à outils Traitements. Les nom et valeur de chaque paramètre sont fournis via un dictionnaire de paramètres. Voir Utiliser les algorithmes du module de traitements depuis la console Python pour plus de détails sur l’exécution d’algorithmes via la console Python.
28.1.14.2. Densité
Exports a raster file based on the number of points within each raster cell - useful for quality checking of point cloud datasets.
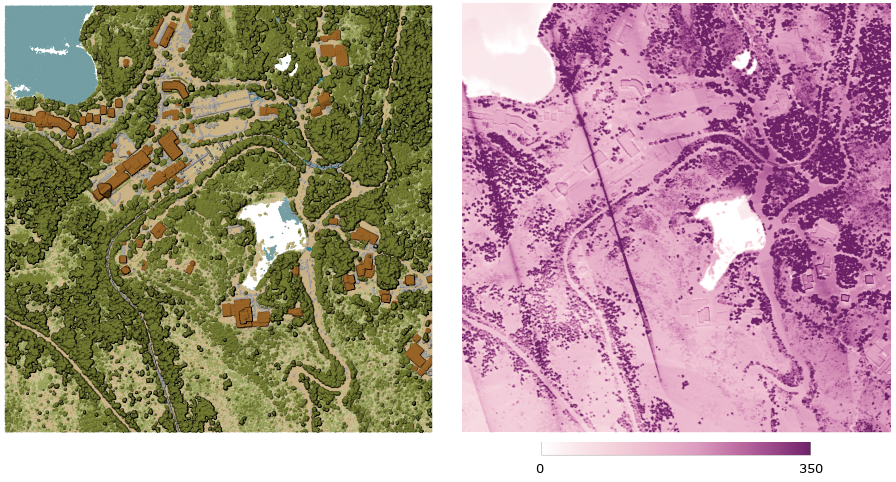
Fig. 28.17 Point density (number of points per 2x2 m) as a raster
Paramètres
Paramètres basiques
Etiquette |
Nom |
Type |
Description |
|---|---|---|---|
Couche en entrée |
|
[nuage de points] |
Couche de nuage de points en entrée à exporter |
Résolution du raster de densité |
|
[number] Par défaut : 1.0 |
Taille de cellule de la couche raster en sortie |
Taille de tuile pour les exécutions parallèles |
|
[number] Par défaut : 1000 |
Size of the tiles to split the data into for parallel runs |
Densité |
|
[raster] Par défaut : |
Indiquez le fichier raster vers lequel exporter la donnée. Il peut être :
|
Paramètres avancés
Etiquette |
Nom |
Type |
Description |
|---|---|---|---|
Expression de filtre Optionnel |
|
[expression] |
Une expression PDAL permettant la sélection d’un ensemble d’entités dans les données de nuage de points |
Cropping extent Optionnel |
|
[emprise] |
A map extent for selecting a subset of features in the point cloud data Les méthodes disponibles sont:
|
X origin of a tile for parallel runs Optionnel |
|
[number] |
|
Y origin of a tile for parallel runs Optionnel |
|
[number] |
Les sorties
Etiquette |
Nom |
Type |
Description |
|---|---|---|---|
Densité |
|
[raster] |
Output raster layer with number of points within each cell.
Currently supported format is |
Code Python
ID de l’algorithme : pdal:density
import processing
processing.run("algorithm_id", {parameter_dictionary})
L”id de l’algorithme est affiché lors du survol du nom de l’algorithme dans la boîte à outils Traitements. Les nom et valeur de chaque paramètre sont fournis via un dictionnaire de paramètres. Voir Utiliser les algorithmes du module de traitements depuis la console Python pour plus de détails sur l’exécution d’algorithmes via la console Python.
28.1.14.3. Filtrer
Extracts point from the input point cloud which match PDAL expression and/or are inside of a cropping rectangle.
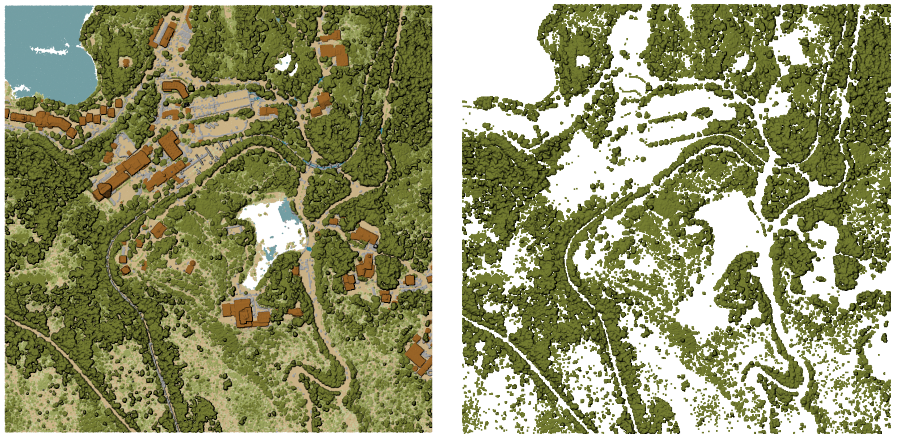
Fig. 28.18 Filtering of high vegetation class from an input point cloud layer
Paramètres
Etiquette |
Nom |
Type |
Description |
|---|---|---|---|
Couche en entrée |
|
[nuage de points] |
Couche de nuage de points en entrée à exporter |
Expression de filtre Optionnel |
|
[expression] |
Une expression PDAL permettant la sélection d’un ensemble d’entités dans les données de nuage de points |
Cropping extent Optionnel |
|
[emprise] |
A map extent for selecting a subset of features in the point cloud data Les méthodes disponibles sont:
|
Filtré |
|
[nuage de points] Par défaut : |
Indiquez le fichier de nuage de points vers lequel exporter la donnée. Il peut être :
|
Les sorties
Etiquette |
Nom |
Type |
Description |
|---|---|---|---|
Filtré |
|
[nuage de points] |
Output point cloud layer with the filtered features of the input point cloud layer.
Currently supported formats are |
Code Python
ID de l’algorithme : pdal:filter
import processing
processing.run("algorithm_id", {parameter_dictionary})
L”id de l’algorithme est affiché lors du survol du nom de l’algorithme dans la boîte à outils Traitements. Les nom et valeur de chaque paramètre sont fournis via un dictionnaire de paramètres. Voir Utiliser les algorithmes du module de traitements depuis la console Python pour plus de détails sur l’exécution d’algorithmes via la console Python.