Important
La traduction est le fruit d’un effort communautaire auquel vous pouvez vous joindre. Cette page est actuellement traduite à 83.33%.
28.1.12. Point Cloud Conversion
NEW in 3.32
Note
Ces algorithmes ne sont disponibles que dans des versions de QGIS utilisant la version 2.5.0 ou ultérieure de la bibliothèque PDAL.
28.1.12.1. Convertir le format
Converts a point cloud to a different file format, e.g. creates a compressed .LAZ.
Paramètres
Étiquette |
Nom |
Type |
Description |
|---|---|---|---|
Couche en entrée |
|
[nuage de points] |
Input point cloud layer to convert |
Converti |
|
[nuage de points] Par défaut : |
Indiquez le fichier de nuage de points à utiliser en sortie. Il peut être :
|
Les sorties
Étiquette |
Nom |
Type |
Description |
|---|---|---|---|
Converti |
|
[nuage de points] |
Output point cloud layer in a modified file format.
Currently supported formats are |
Code Python
ID de l’algorithme : pdal:convertformat
import processing
processing.run("algorithm_id", {parameter_dictionary})
L”id de l’algorithme est affiché lors du survol du nom de l’algorithme dans la boîte à outils Traitements. Les nom et valeur de chaque paramètre sont fournis via un dictionnaire de paramètres. Voir Utiliser les algorithmes du module de traitements depuis la console Python pour plus de détails sur l’exécution d’algorithmes via la console Python.
28.1.12.2. Export to raster
Exports point cloud data to a 2D raster grid having cell size of given resolution, writing values from the specified attribute.
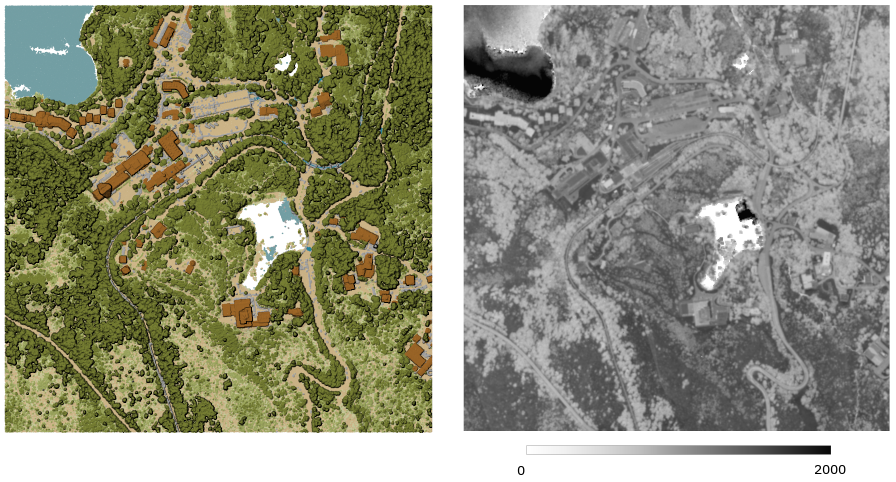
Fig. 28.10 Raster output using Intensity attribute of points
Paramètres
Paramètres basiques
Étiquette |
Nom |
Type |
Description |
|---|---|---|---|
Couche en entrée |
|
[nuage de points] |
Couche de nuage de points en entrée à exporter |
Attribute |
|
[field] [enumeration] |
A Field of the point cloud layer to extract the values from |
Résolution du raster de densité |
|
[nombre] Par défaut : 1.0 |
Taille de cellule de la couche raster en sortie |
Taille de tuile pour les exécutions parallèles |
|
[nombre] Par défaut : 1000 |
|
Exported |
|
[raster] Par défaut : |
Indiquez le fichier raster vers lequel exporter la donnée. Il peut être :
|
Paramètres avancés
Étiquette |
Nom |
Type |
Description |
|---|---|---|---|
Expression de filtre Optionnel |
|
[expression] |
Une expression PDAL permettant la sélection d’un ensemble d’entités dans les données de nuage de points |
Cropping extent Optionnel |
|
[emprise] |
A map extent for selecting a subset of features in the point cloud data Les méthodes disponibles sont :
|
X origin of a tile for parallel runs Optionnel |
|
[nombre] |
|
Y origin of a tile for parallel runs Optionnel |
|
[nombre] |
Les sorties
Étiquette |
Nom |
Type |
Description |
|---|---|---|---|
Exported |
|
[raster] |
Output raster layer features of the point cloud layer are exported to.
Currently supported format is |
Code Python
ID de l’algorithme : pdal:exportraster
import processing
processing.run("algorithm_id", {parameter_dictionary})
L”id de l’algorithme est affiché lors du survol du nom de l’algorithme dans la boîte à outils Traitements. Les nom et valeur de chaque paramètre sont fournis via un dictionnaire de paramètres. Voir Utiliser les algorithmes du module de traitements depuis la console Python pour plus de détails sur l’exécution d’algorithmes via la console Python.
28.1.12.3. Export raster (using triangulation)
Exports point cloud data to a 2D raster grid using a triangulation of points and then interpolating cell values from triangles.
Note
Using this algorithm can be slower if you are dealing with a large dataset. If your point cloud is dense, you can export your ground points as a raster using the Export to raster algorithm.
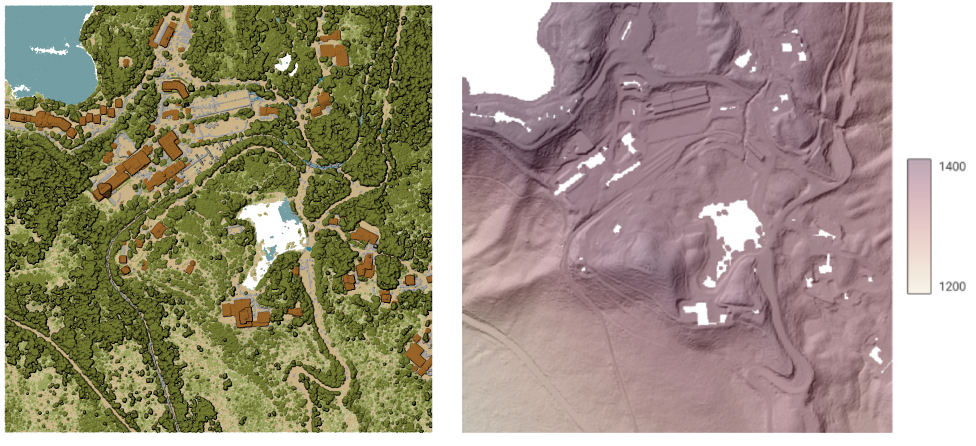
Fig. 28.11 Terrain raster output generated by point cloud triangulation
Paramètres
Paramètres basiques
Étiquette |
Nom |
Type |
Description |
|---|---|---|---|
Couche en entrée |
|
[nuage de points] |
Couche de nuage de points en entrée à exporter |
Résolution du raster de densité |
|
[nombre] Par défaut : 1.0 |
Taille de cellule de la couche raster en sortie |
Taille de tuile pour les exécutions parallèles |
|
[nombre] Par défaut : 1000 |
|
Exported |
|
[raster] Par défaut : |
Indiquez le fichier raster vers lequel exporter la donnée. Il peut être :
|
Paramètres avancés
Étiquette |
Nom |
Type |
Description |
|---|---|---|---|
Expression de filtre Optionnel |
|
[expression] |
Une expression PDAL permettant la sélection d’un ensemble d’entités dans les données de nuage de points |
Cropping extent Optionnel |
|
[emprise] |
A map extent for selecting a subset of features in the point cloud data Les méthodes disponibles sont :
|
X origin of a tile for parallel runs Optionnel |
|
[nombre] |
|
Y origin of a tile for parallel runs Optionnel |
|
[nombre] |
Les sorties
Étiquette |
Nom |
Type |
Description |
|---|---|---|---|
Exported (using triangulation) |
|
[raster] |
Output raster layer features of the point cloud layer are exported to.
Currently supported format is |
Code Python
ID de l’algorithme : pdal:exportrastertin
import processing
processing.run("algorithm_id", {parameter_dictionary})
L”id de l’algorithme est affiché lors du survol du nom de l’algorithme dans la boîte à outils Traitements. Les nom et valeur de chaque paramètre sont fournis via un dictionnaire de paramètres. Voir Utiliser les algorithmes du module de traitements depuis la console Python pour plus de détails sur l’exécution d’algorithmes via la console Python.
28.1.12.4. Export to vector
Exports point cloud data to a vector layer with 3D points (a GeoPackage), optionally with extra attributes.
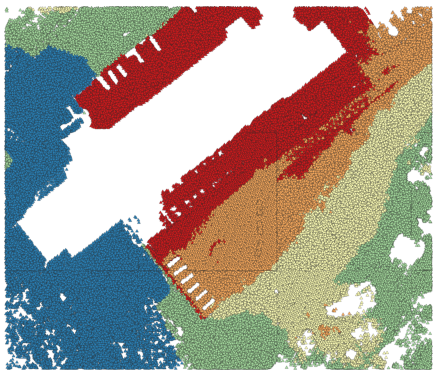
Fig. 28.12 Exporting point cloud (ground points) to a vector layer styled based on the elevation
Paramètres
Paramètres basiques
Étiquette |
Nom |
Type |
Description |
|---|---|---|---|
Couche en entrée |
|
[nuage de points] |
Couche de nuage de points en entrée à exporter |
Attribute Optionnel |
|
[field] [list] |
One or more fields of the point cloud layer to export with the points. |
Exported |
|
[vecteur] Par défaut : |
Specify the vector file to export the data to. One of:
|
Paramètres avancés
Étiquette |
Nom |
Type |
Description |
|---|---|---|---|
Expression de filtre Optionnel |
|
[expression] |
Une expression PDAL permettant la sélection d’un ensemble d’entités dans les données de nuage de points |
Cropping extent Optionnel |
|
[emprise] |
A map extent for selecting a subset of features in the point cloud data Les méthodes disponibles sont :
|
Les sorties
Étiquette |
Nom |
Type |
Description |
|---|---|---|---|
Exported |
|
[vecteur] |
Output vector layer features of the point cloud layer are exported to.
Currently supported format is |
Code Python
ID de l’algorithme : pdal:exportvector
import processing
processing.run("algorithm_id", {parameter_dictionary})
L”id de l’algorithme est affiché lors du survol du nom de l’algorithme dans la boîte à outils Traitements. Les nom et valeur de chaque paramètre sont fournis via un dictionnaire de paramètres. Voir Utiliser les algorithmes du module de traitements depuis la console Python pour plus de détails sur l’exécution d’algorithmes via la console Python.