Importante
La traducción es un esfuerzo comunitario puede unirse. Esta página está actualmente traducida en |progreso de traducción|.
28.1.12. Conversión de nubes de puntos
NEW in 3.32
Nota
Estos algoritmos sólo están disponibles si QGIS utiliza la biblioteca PDAL versión 2.5.0 o posterior.
28.1.12.1. Convertir formato
Convierte una nube de puntos a un formato de archivo diferente, por ejemplo, crea un archivo comprimido .LAZ.
Parámetros
Etiqueta |
Nombre |
Tipo |
Descripción |
|---|---|---|---|
Capa de entrada |
|
[nube de puntos] |
Capa de nube de puntos de entrada a convertir |
Convertido |
|
[nube de puntos] Predeterminado: |
Especifique el archivo de nube de puntos que se utilizará como salida. Uno de:
|
Salidas
Etiqueta |
Nombre |
Tipo |
Descripción |
|---|---|---|---|
Convertido |
|
[nube de puntos] |
Da salida a la capa de nube de puntos en un formato de archivo modificado. Los formatos actualmente soportados son |
Código Python
ID Algoritmo: pdal:convertformat
import processing
processing.run("algorithm_id", {parameter_dictionary})
El algoritmo id se muestra al desplazarse sobre el algoritmo en la Caja de Herramientas de Procesamiento. El parámetro diccionario suministra los NOMBREs y valores de los parámetros. Ver consola_procesamiento para detalles sobre como ejecutar algoritmos desde la consola Python.
28.1.12.2. Exportar a ráster
Exporta los datos de la nube de puntos a una grid ráster 2D con un tamaño de celda de resolución dada, escribiendo los valores del atributo especificado.
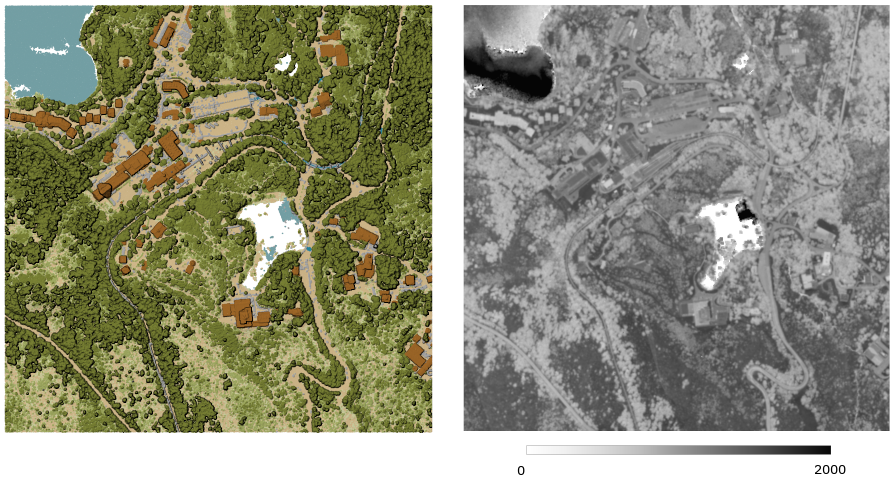
Figura 28.10 Salida raster utilizando el atributo Intensidad de los puntos
Parámetros
Parámetros básicos
Etiqueta |
Nombre |
Tipo |
Descripción |
|---|---|---|---|
Capa de entrada |
|
[nube de puntos] |
Capa de nube de puntos de entrada para exportar |
Atributo |
|
[campo] [enumeración] |
A Campo de la capa de nube de puntos de la que extraer los valores |
Resolución del ráster de densidad |
|
[número] Predeterminado: 1.0 |
Tamaño de celda del raster de salida |
Tamaño de las baldosas para recorridos paralelos |
|
[número] Preestablecido: 1000 |
|
Exportado |
|
[raster] Predeterminado: |
Especifique el archivo raster al que exportar los datos. Uno de:
|
Parámetros avanzados
Etiqueta |
Nombre |
Tipo |
Descripción |
|---|---|---|---|
Expresión de filtrado Opcional |
|
[expresión] |
Una expresión PDAL para seleccionar un subconjunto de objetos espaciales en los datos de la nube de puntos |
Extensión del cultivo Opcional |
|
[extensión] |
Una extensión del mapa para seleccionar un subconjunto de objetos espaciales en los datos de la nube de puntos Los métodos disponibles son:
|
Origen X de una tesela para recorridos paralelos Opcional |
|
[número] |
|
Origen Y de una tesela para ejecuciones paralelas Opcional |
|
[número] |
Salidas
Etiqueta |
Nombre |
Tipo |
Descripción |
|---|---|---|---|
Exportado |
|
[raster] |
Los objetos espaciales de la capa ráster de salida de la capa de nube de puntos se exportan a. El formato actualmente soportado es |
Código Python
ID Algoritmo: pdal:exportraster
import processing
processing.run("algorithm_id", {parameter_dictionary})
El algoritmo id se muestra al desplazarse sobre el algoritmo en la Caja de Herramientas de Procesamiento. El parámetro diccionario suministra los NOMBREs y valores de los parámetros. Ver consola_procesamiento para detalles sobre como ejecutar algoritmos desde la consola Python.
28.1.12.3. Exportar ráster (mediante triangulación)
Exporta datos de nubes de puntos a un grid ráster 2D utilizando una triangulación de puntos e interpolando después los valores de las celdas a partir de los triángulos.
Nota
El uso de este algoritmo puede ser más lento si se trata de un gran conjunto de datos. Si su nube de puntos es densa, puede exportar sus puntos de tierra como un ráster utilizando el algoritmo Exportar a ráster.
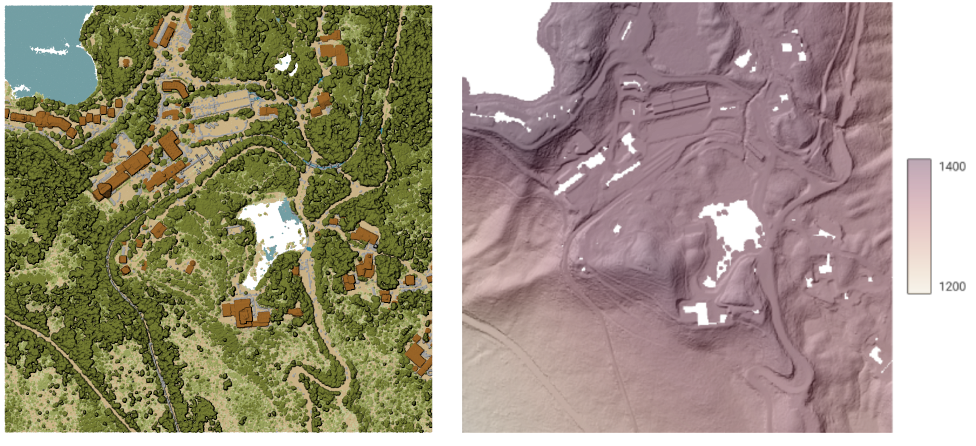
Figura 28.11 Raster del terreno generado por triangulación de nubes de puntos
Parámetros
Parámetros básicos
Etiqueta |
Nombre |
Tipo |
Descripción |
|---|---|---|---|
Capa de entrada |
|
[nube de puntos] |
Capa de nube de puntos de entrada para exportar |
Resolución del ráster de densidad |
|
[número] Predeterminado: 1.0 |
Tamaño de celda del raster de salida |
Tamaño de las baldosas para recorridos paralelos |
|
[número] Preestablecido: 1000 |
|
Exportado |
|
[raster] Predeterminado: |
Especifique el archivo raster al que exportar los datos. Uno de:
|
Parámetros avanzados
Etiqueta |
Nombre |
Tipo |
Descripción |
|---|---|---|---|
Expresión de filtrado Opcional |
|
[expresión] |
Una expresión PDAL para seleccionar un subconjunto de objetos espaciales en los datos de la nube de puntos |
Extensión del cultivo Opcional |
|
[extensión] |
Una extensión del mapa para seleccionar un subconjunto de objetos espaciales en los datos de la nube de puntos Los métodos disponibles son:
|
Origen X de una tesela para recorridos paralelos Opcional |
|
[número] |
|
Origen Y de una tesela para ejecuciones paralelas Opcional |
|
[número] |
Salidas
Etiqueta |
Nombre |
Tipo |
Descripción |
|---|---|---|---|
Exportado (usando triangulación) |
|
[raster] |
Los objetos espaciales de la capa ráster de salida de la capa de nube de puntos se exportan a. El formato actualmente soportado es |
Código Python
Identificación del algoritmo: pdal:exportrastertin
import processing
processing.run("algorithm_id", {parameter_dictionary})
El algoritmo id se muestra al desplazarse sobre el algoritmo en la Caja de Herramientas de Procesamiento. El parámetro diccionario suministra los NOMBREs y valores de los parámetros. Ver consola_procesamiento para detalles sobre como ejecutar algoritmos desde la consola Python.
28.1.12.4. Exportar a vector
Exporta datos de nubes de puntos a una capa vectorial con puntos 3D (un GeoPackage), opcionalmente con atributos extra.
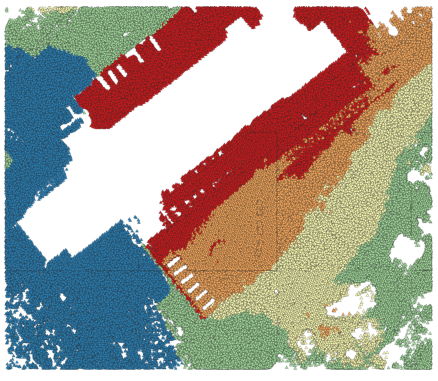
Figura 28.12 Exportación de la nube de puntos (puntos del terreno) a una capa vectorial con un estilo basado en la elevación
Parámetros
Parámetros básicos
Etiqueta |
Nombre |
Tipo |
Descripción |
|---|---|---|---|
Capa de entrada |
|
[nube de puntos] |
Capa de nube de puntos de entrada para exportar |
Atributo Opcional |
|
[field] [list] |
Uno o más campos de la capa de nube de puntos a exportar con los puntos. |
Exportado |
|
[vector] Predeterminado: |
Especifique el archivo vectorial al que exportar los datos. Uno de:
|
Parámetros avanzados
Etiqueta |
Nombre |
Tipo |
Descripción |
|---|---|---|---|
Expresión de filtrado Opcional |
|
[expresión] |
Una expresión PDAL para seleccionar un subconjunto de objetos espaciales en los datos de la nube de puntos |
Extensión del cultivo Opcional |
|
[extensión] |
Una extensión del mapa para seleccionar un subconjunto de objetos espaciales en los datos de la nube de puntos Los métodos disponibles son:
|
Salidas
Etiqueta |
Nombre |
Tipo |
Descripción |
|---|---|---|---|
Exportado |
|
[vector] |
Los objetos espaciales de la capa vectorial de salida de la capa de nube de puntos se exportan a. El formato actualmente soportado es |
Código Python
ID Algoritmo: pdal:exportvector
import processing
processing.run("algorithm_id", {parameter_dictionary})
El algoritmo id se muestra al desplazarse sobre el algoritmo en la Caja de Herramientas de Procesamiento. El parámetro diccionario suministra los NOMBREs y valores de los parámetros. Ver consola_procesamiento para detalles sobre como ejecutar algoritmos desde la consola Python.