Importante
unireLa traduzione è uno sforzo comunitario you can join. Questa pagina è attualmente tradotta al 100.00%.
28.1.12. Conversione Nuvola di Punti
NEW in 3.32
Nota
Questi algoritmi sono disponibili solo se QGIS utilizza la libreria PDAL versione 2.5.0 o più recente.
28.1.12.1. Converti formato
Converte una nuvola di punti in un formato file diverso, ad esempio crea un file compresso .LAZ.
Parametri
Etichetta |
Nome |
Tipo |
Descrizione |
|---|---|---|---|
Layer di input |
|
[point cloud] |
Layer nuvola di punti in ingresso da convertire |
Convertito |
|
[point cloud] Predefinito: |
Specifica il file della nuvola di punti da utilizzare in uscita. Uno dei seguenti:
|
Output
Etichetta |
Nome |
Tipo |
Descrizione |
|---|---|---|---|
Convertito |
|
[point cloud] |
Layer nuvola di punti in uscita in un formato di file modificato. I formati attualmente supportati sono |
Codice Python
ID Algoritmo: pdal:convertformat
import processing
processing.run("algorithm_id", {parameter_dictionary})
L”id algoritmo viene visualizzato quando passi il mouse sull’algoritmo nella finestra degli strumenti di Processing. Il dizionario dei parametri fornisce i nomi e i valori dei parametri. Vedi Usare gli algoritmi di Processing dalla console dei comandi per i dettagli su come eseguire gli algoritmi di processing dalla console Python.
28.1.12.2. Esportare in raster
Esporta i dati della nuvola di punti in un reticolo raster 2D con dimensioni delle celle di una determinata risoluzione, scrivendo i valori dell’attributo specificato.
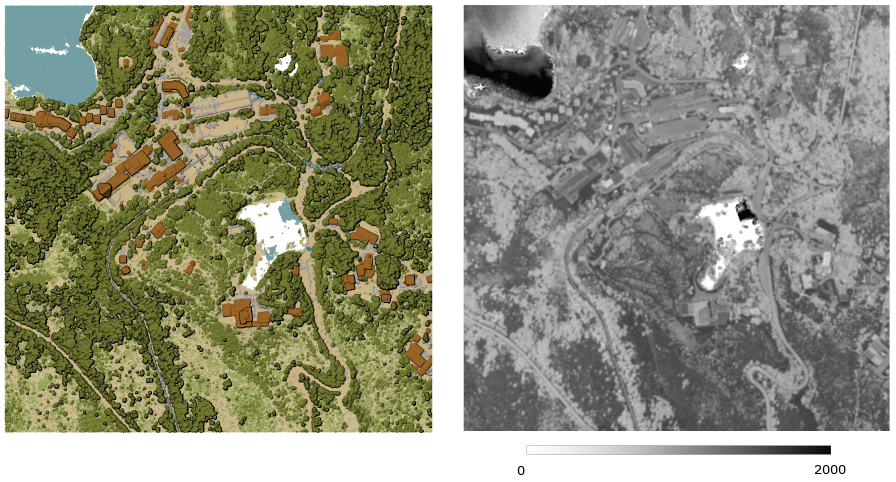
Fig. 28.10 Raster risultato utilizzando l’attributo Intensità dei punti
Parametri
Parametri di base
Etichetta |
Nome |
Tipo |
Descrizione |
|---|---|---|---|
Layer di input |
|
[point cloud] |
Layer nuvola di punti in ingresso da esportare |
Attributo |
|
[field] [enumeration] |
Un Campo del layer nuvola di punti da cui estrarre i valori |
Risoluzione del raster di densità |
|
[number] Predefinito: 1.0 |
Dimensione della cella del raster in uscita |
Dimensioni tasselli per operazioni in parallelo |
|
[number] Predefinito: 1000 |
|
Esportato |
|
[raster] Predefinito: |
Specifica il file raster in cui esportare i dati. Uno dei seguenti:
|
Parametri avanzati
Etichetta |
Nome |
Tipo |
Descrizione |
|---|---|---|---|
Espressione filtro Opzionale |
|
[expression] |
Una PDAL expression per selezionare un sottoinsieme di elementi nei dati della nuvola di punti |
Estensione su cui applicare l’algoritmo Opzionale |
|
[extent] |
Un’estensione della mappa per selezionare un sottoinsieme di elementi nei dati della nuvola di punti I metodi disponibili sono:
|
origine X di un tassello per operazioni in parallelo Opzionale |
|
[number] |
|
origine Y di un tassello per operazioni in parallelo Opzionale |
|
[number] |
Output
Etichetta |
Nome |
Tipo |
Descrizione |
|---|---|---|---|
Esportato |
|
[raster] |
Gli elementi del layer nuvola di punti vengono esportati in un layer raster di uscita. Il formato attualmente supportato è |
Codice Python
ID Algoritmo: pdal:exportraster
import processing
processing.run("algorithm_id", {parameter_dictionary})
L”id algoritmo viene visualizzato quando passi il mouse sull’algoritmo nella finestra degli strumenti di Processing. Il dizionario dei parametri fornisce i nomi e i valori dei parametri. Vedi Usare gli algoritmi di Processing dalla console dei comandi per i dettagli su come eseguire gli algoritmi di processing dalla console Python.
28.1.12.3. Esportare raster (utilizzando triangolazione)
Esporta i dati della nuvola di punti in un reticolo raster 2D utilizzando una triangolazione di punti e interpolando i valori delle celle dai triangoli.
Nota
L’uso di questo algoritmo può essere più lento se si ha a che fare con un set di dati di grandi dimensioni. Se la nuvola di punti è densa, puoi esportare i punti a terra come raster utilizzando l’algoritmo Esportare in raster.
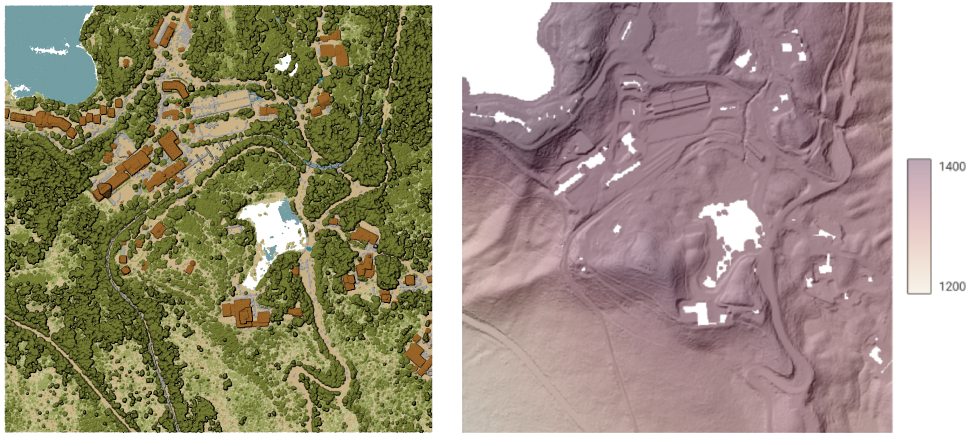
Fig. 28.11 Raster del terreno in uscita generato dalla triangolazione della nuvola di punti
Parametri
Parametri di base
Etichetta |
Nome |
Tipo |
Descrizione |
|---|---|---|---|
Layer di input |
|
[point cloud] |
Layer nuvola di punti in ingresso da esportare |
Risoluzione del raster di densità |
|
[number] Predefinito: 1.0 |
Dimensione della cella del raster in uscita |
Dimensioni tasselli per operazioni in parallelo |
|
[number] Predefinito: 1000 |
|
Esportato |
|
[raster] Predefinito: |
Specifica il file raster in cui esportare i dati. Uno dei seguenti:
|
Parametri avanzati
Etichetta |
Nome |
Tipo |
Descrizione |
|---|---|---|---|
Espressione filtro Opzionale |
|
[expression] |
Una PDAL expression per selezionare un sottoinsieme di elementi nei dati della nuvola di punti |
Estensione su cui applicare l’algoritmo Opzionale |
|
[extent] |
Un’estensione della mappa per selezionare un sottoinsieme di elementi nei dati della nuvola di punti I metodi disponibili sono:
|
origine X di un tassello per operazioni in parallelo Opzionale |
|
[number] |
|
origine Y di un tassello per operazioni in parallelo Opzionale |
|
[number] |
Output
Etichetta |
Nome |
Tipo |
Descrizione |
|---|---|---|---|
Esportato (utilizzando triagolazione) |
|
[raster] |
Gli elementi del layer nuvola di punti vengono esportati in un layer raster di uscita. Il formato attualmente supportato è |
Codice Python
ID Algoritmo: pdal:exportrastertin
import processing
processing.run("algorithm_id", {parameter_dictionary})
L”id algoritmo viene visualizzato quando passi il mouse sull’algoritmo nella finestra degli strumenti di Processing. Il dizionario dei parametri fornisce i nomi e i valori dei parametri. Vedi Usare gli algoritmi di Processing dalla console dei comandi per i dettagli su come eseguire gli algoritmi di processing dalla console Python.
28.1.12.4. Esportazione in layer vettoriale
Esporta i dati della nuvola di punti in un layer vettoriale con punti 3D (un GeoPackage), eventualmente con attributi aggiuntivi.
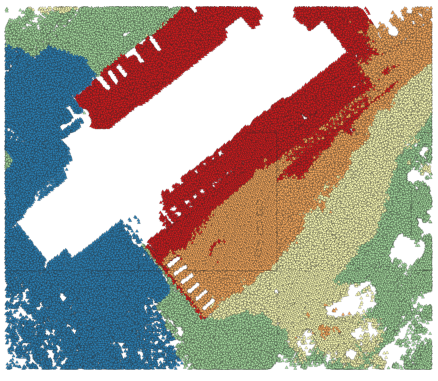
Fig. 28.12 Esportazione della nuvola di punti (punti al suolo) in un layer vettoriale con stile basato sulla quota.
Parametri
Parametri di base
Etichetta |
Nome |
Tipo |
Descrizione |
|---|---|---|---|
Layer di input |
|
[point cloud] |
Layer nuvola di punti in ingresso da esportare |
Attributo Opzionale |
|
[field] [list] |
Uno o più campi del layer della nuvola di punti da esportare con i punti. |
Esportato |
|
[vector] Predefinito: |
Specificare il file vettoriale in cui esportare i dati. Uno dei seguenti:
|
Parametri avanzati
Etichetta |
Nome |
Tipo |
Descrizione |
|---|---|---|---|
Espressione filtro Opzionale |
|
[expression] |
Una PDAL expression per selezionare un sottoinsieme di elementi nei dati della nuvola di punti |
Estensione su cui applicare l’algoritmo Opzionale |
|
[extent] |
Un’estensione della mappa per selezionare un sottoinsieme di elementi nei dati della nuvola di punti I metodi disponibili sono:
|
Output
Etichetta |
Nome |
Tipo |
Descrizione |
|---|---|---|---|
Esportato |
|
[vector] |
Gli elementi del layer vettoriale in uscita del layer della nuvola di punti vengono esportati. Il formato attualmente supportato è |
Codice Python
ID Algoritmo: pdal:exportvector
import processing
processing.run("algorithm_id", {parameter_dictionary})
L”id algoritmo viene visualizzato quando passi il mouse sull’algoritmo nella finestra degli strumenti di Processing. Il dizionario dei parametri fornisce i nomi e i valori dei parametri. Vedi Usare gli algoritmi di Processing dalla console dei comandi per i dettagli su come eseguire gli algoritmi di processing dalla console Python.