Importante
unireLa traduzione è uno sforzo comunitario you can join. Questa pagina è attualmente tradotta al 100.00%.
28.1.13. Gestione Dati Nuvola di Punti
NEW in 3.32
Nota
Questi algoritmi sono disponibili solo se QGIS utilizza la libreria PDAL versione 2.5.0 o più recente.
28.1.13.1. Assegnare proiezione
Assegna un Sistema di riferimento delle coordinate a un layer della nuvola di punti, se manca o è errato. Viene creato un nuovo layer.
Vedi anche
Parametri
Etichetta |
Nome |
Tipo |
Descrizione |
|---|---|---|---|
Layer in ingresso |
|
[point cloud] |
Layer nuvola di punti in ingresso a cui assegnare un SR |
SR desiderato |
|
[crs] |
Il SR da applicare al layer |
Layer in uscita |
|
[point cloud] Predefinito: |
Specifica il file della nuvola di punti da utilizzare in uscita. Uno dei seguenti:
|
In uscita:
Etichetta |
Nome |
Tipo |
Descrizione |
|---|---|---|---|
Convertito |
|
[point cloud] |
Layer nuvola di punti in uscita con un nuovo SR. I formati attualmente supportati sono |
Codice Python
ID Algoritmo: pdal:assignprojection
import processing
processing.run("algorithm_id", {parameter_dictionary})
L” id dell’algoritmo viene visualizzato quando si passa il mouse sull’algoritmo nella finestra degli strumenti di elaborazione. Il dizionario dei parametri fornisce i Nomi e i valori dei parametri. Vedi Usare gli algoritmi di Processing dalla console dei comandi per dettagli su come eseguire algoritmi di elaborazione dalla console Python.
28.1.13.2. Creare una nuvola di punti virtuale (VPC)
Crea una virtual point cloud (VPC) dai dati della nuvola di punti in ingresso.
Se lasci i parametri opzionali non selezionati, il file VPC verrà creato molto rapidamente, poiché l’algoritmo leggerà solo i metadati dei file in ingresso. Con uno qualsiasi dei parametri opzionali impostati, l’algoritmo leggerà tutti i punti, il che può richiedere del tempo.
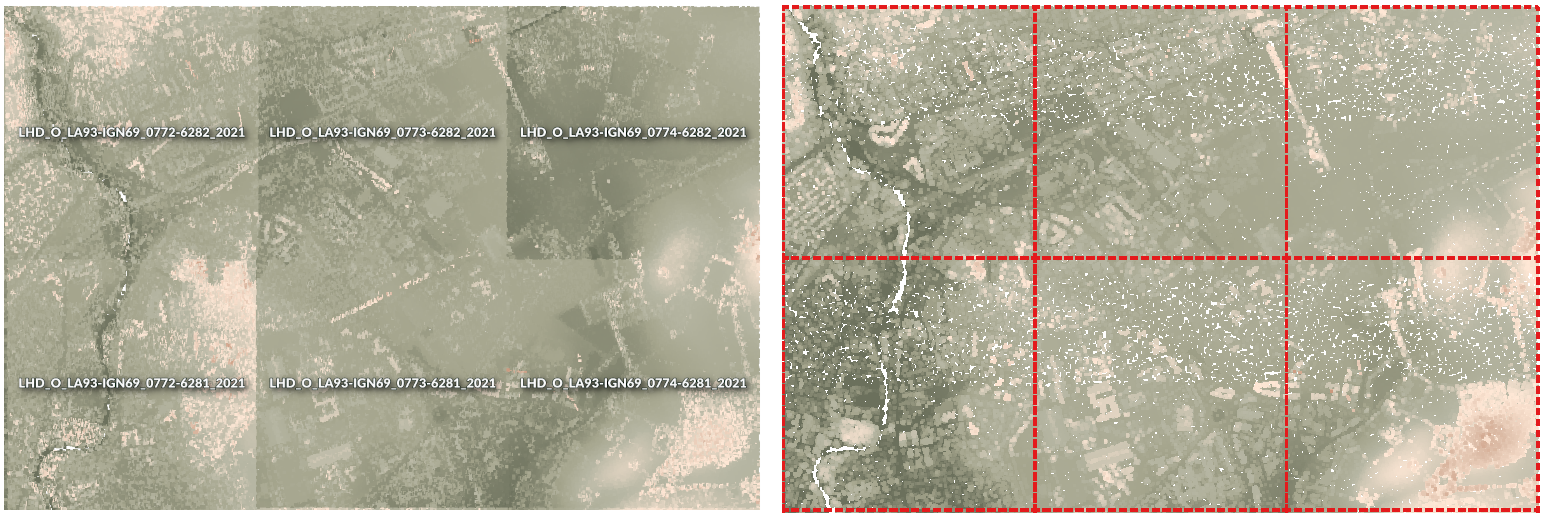
Fig. 28.13 Generazione di nuvole di punti virtuali con visualizzazione da un insieme di tasselli di nuvole di punti
Vedi anche
Parametri
Etichetta |
Nome |
Tipo |
Descrizione |
|---|---|---|---|
Layer in ingresso |
|
[point cloud] [list] |
Layer di nuvole di punti in ingresso da combinare in un layer di nuvole di punti virtuali |
Calcolo del poligono delimitante |
|
[boolean] Predefinito: False |
Imposta su True per mostrare i confini esatti dei dati (piuttosto che la semplice estensione rettangolare). |
Calcola statistiche |
|
[boolean] Predefinito: False |
Imposta su True per comprendere gli intervalli di valori dei vari attributi. |
Costruisce una nuvola di punti panoramica |
|
[boolean] Predefinito: False |
Genera una singola nuvola di punti «sfoltita» di tutti i dati in ingresso (utilizzando solo un punto ogni 1000 dai dati originali). La nuvola di punti panoramica sarà creata accanto al file VPC, ad esempio per |
Nuvola di punti virtuale |
|
[point cloud] Predefinito: |
Specificare il file della nuvola di punti in cui costruire i dati. Uno dei seguenti:
|
In uscita:
Etichetta |
Nome |
Tipo |
Descrizione |
|---|---|---|---|
Nuvola di punti virtuale |
|
[raster] |
Layer nuvola di punti in uscita che combina tutti i dati di input, come file virtuale. |
Codice Python
ID Algoritmo: pdal:virtualpointcloud
import processing
processing.run("algorithm_id", {parameter_dictionary})
L” id dell’algoritmo viene visualizzato quando si passa il mouse sull’algoritmo nella finestra degli strumenti di elaborazione. Il dizionario dei parametri fornisce i Nomi e i valori dei parametri. Vedi Usare gli algoritmi di Processing dalla console dei comandi per dettagli su come eseguire algoritmi di elaborazione dalla console Python.
28.1.13.3. Ritaglia
Ritaglia un layer nuvola di punti con un vettore poligonale in modo che la nuvola di punti risultante contenga solo i punti all’interno dei poligoni.
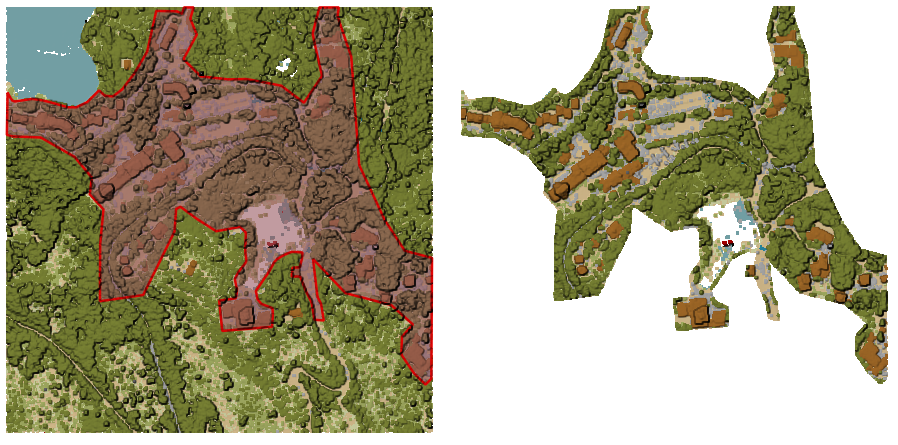
Fig. 28.14 Ritaglio di un layer nuvola di punti in ingresso con una copertura poligonale
Parametri
Parametri di Base
Etichetta |
Nome |
Tipo |
Descrizione |
|---|---|---|---|
Layer in ingresso |
|
[point cloud] |
Layer nuvola di punti in ingresso da ritagliare |
Poligoni di ritaglio |
|
[vector: polygon] |
Layer vettoriale poligonale da utilizzare come copertura per il ritaglio dei punti |
Ritagliati |
|
[point cloud] Predefinito: |
Specificare il file nuvola di punti in cui esportare i punti ritagliati. Uno dei seguenti:
|
Parametri Avanzati
Etichetta |
Nome |
Tipo |
Descrizione |
|---|---|---|---|
Espressione filtro Opzionale |
|
[expression] |
Una PDAL expression per selezionare un sottoinsieme di elementi nei dati della nuvola di punti |
Estensione su cui applicare l’algoritmo Opzionale |
|
[extent] |
Un’estensione della mappa per selezionare un sottoinsieme di elementi nei dati della nuvola di punti I metodi disponibili sono:
|
In uscita:
Etichetta |
Nome |
Tipo |
Descrizione |
|---|---|---|---|
Ritagliati |
|
[raster] |
Nuvola di punti in uscita i cui elementi sono i punti all’interno del layer del poligono di copertura. |
Codice Python
ID Algoritmo: pdal:clip
import processing
processing.run("algorithm_id", {parameter_dictionary})
L” id dell’algoritmo viene visualizzato quando si passa il mouse sull’algoritmo nella finestra degli strumenti di elaborazione. Il dizionario dei parametri fornisce i Nomi e i valori dei parametri. Vedi Usare gli algoritmi di Processing dalla console dei comandi per dettagli su come eseguire algoritmi di elaborazione dalla console Python.
28.1.13.4. Crea COPC
Crea l’indice per tutti i file della nuvola di punti in ingresso in modalità batch.
Parametri
Etichetta |
Nome |
Tipo |
Descrizione |
|---|---|---|---|
Layer in ingresso |
|
[point cloud] [list] |
Layer della nuvola di punti in ingresso di per cui creare un indice |
Cartella in uscita Opzionale |
|
[folder] Predefinito: |
Specificare la cartella in cui creare i nuovi file. Una delle seguenti:
|
In uscita:
Etichetta |
Nome |
Tipo |
Descrizione |
|---|---|---|---|
Cartella in uscita |
|
[folder] |
Cartella risultato contenente i layer delle nuvole di punti con i relativi file di indice COPC. |
Codice Python
ID Algoritmo: pdal:createcopc
import processing
processing.run("algorithm_id", {parameter_dictionary})
L” id dell’algoritmo viene visualizzato quando si passa il mouse sull’algoritmo nella finestra degli strumenti di elaborazione. Il dizionario dei parametri fornisce i Nomi e i valori dei parametri. Vedi Usare gli algoritmi di Processing dalla console dei comandi per dettagli su come eseguire algoritmi di elaborazione dalla console Python.
28.1.13.5. Informazioni
Fornisce i metadati di base da un file di nuvola di punti in ingresso.
Esempio di informazioni in uscita:
LAS 1.4
point format 6
count 56736130
scale 0.001 0.001 0.001
offset 431749.999 5440919.999 968.898
extent 431250 5440420 424.266
432249.999 5441419.999 1513.531
crs ETRS89 / UTM zone 34N (N-E) (EPSG:3046) (vertical CRS missing!)
units horizontal=metre vertical=unknown
Attributes:
- X floating 8
- Y floating 8
- Z floating 8
- Intensity unsigned 2
- ReturnNumber unsigned 1
- NumberOfReturns unsigned 1
- ScanDirectionFlag unsigned 1
- EdgeOfFlightLine unsigned 1
- Classification unsigned 1
- ScanAngleRank floating 4
- UserData unsigned 1
- PointSourceId unsigned 2
- GpsTime floating 8
- ScanChannel unsigned 1
- ClassFlags unsigned 1
Parametri
Etichetta |
Nome |
Tipo |
Descrizione |
|---|---|---|---|
Layer in ingresso |
|
[point cloud] |
Layer della nuvola di punti in ingresso da cui estrarre le informazioni sui metadati |
Informazioni Layer |
|
[file] Predefinito: |
Specificare il file in cui memorizzare le informazioni sui metadati. Uno di:
|
In uscita:
Etichetta |
Nome |
Tipo |
Descrizione |
|---|---|---|---|
Informazioni Layer |
|
[vector] |
|
Codice Python
ID Algoritmo: pdal:info
import processing
processing.run("algorithm_id", {parameter_dictionary})
L” id dell’algoritmo viene visualizzato quando si passa il mouse sull’algoritmo nella finestra degli strumenti di elaborazione. Il dizionario dei parametri fornisce i Nomi e i valori dei parametri. Vedi Usare gli algoritmi di Processing dalla console dei comandi per dettagli su come eseguire algoritmi di elaborazione dalla console Python.
28.1.13.6. Fondi (merge)
Fonde più file di nuvole di punti in un unico file.
Vedi anche
Parametri
Parametri di Base
Etichetta |
Nome |
Tipo |
Descrizione |
|---|---|---|---|
Layer in ingresso |
|
[point cloud] [list] |
Layer nuvola di punti in ingresso da unire in un unico layer |
Fuso |
|
[point cloud] Predefinito: |
Specificare la nuvola di punti in uscita che fonde i file in ingresso. Uno di:
|
Parametri Avanzati
Etichetta |
Nome |
Tipo |
Descrizione |
|---|---|---|---|
Espressione filtro Opzionale |
|
[expression] |
Una PDAL expression per selezionare un sottoinsieme di elementi nei dati della nuvola di punti |
Estensione su cui applicare l’algoritmo Opzionale |
|
[extent] |
Un’estensione della mappa per selezionare un sottoinsieme di elementi nei dati della nuvola di punti I metodi disponibili sono:
|
In uscita:
Etichetta |
Nome |
Tipo |
Descrizione |
|---|---|---|---|
Fuso |
|
[point cloud] |
Layer nuvola di punti in uscita che unisce tutti i file in ingresso. |
Codice Python
ID Algoritmo: pdal:merge
import processing
processing.run("algorithm_id", {parameter_dictionary})
L” id dell’algoritmo viene visualizzato quando si passa il mouse sull’algoritmo nella finestra degli strumenti di elaborazione. Il dizionario dei parametri fornisce i Nomi e i valori dei parametri. Vedi Usare gli algoritmi di Processing dalla console dei comandi per dettagli su come eseguire algoritmi di elaborazione dalla console Python.
28.1.13.7. Riproiettare
Riproietta una nuvola di punti in un diverso sistema di riferimento di coordinate (SR).
Vedi anche
Parametri
Etichetta |
Nome |
Tipo |
Descrizione |
|---|---|---|---|
Layer in ingresso |
|
[point cloud] |
Layer nuvola di punti in ingresso da riproiettare su un SR diverso |
SR di destinazione |
|
[crs] |
Il SR da applicare al layer |
Riproiettato |
|
[point cloud] Predefinito: |
Specificare il file della nuvola di punti riproiettata. Uno dei seguenti:
|
Parametri Avanzati
Etichetta |
Nome |
Tipo |
Descrizione |
|---|---|---|---|
Operazione coordinata Opzionale |
|
[datum] |
Il datum transformation da usare per riproiettare i dati tra i sistemi di origine e di destinazione. |
In uscita:
Etichetta |
Nome |
Tipo |
Descrizione |
|---|---|---|---|
REPROJECTED |
|
[point cloud] |
Layer nuvola di punti in uscita nel SR di destinazione. |
Codice Python
ID Algoritmo: pdal:reproject
import processing
processing.run("algorithm_id", {parameter_dictionary})
L” id dell’algoritmo viene visualizzato quando si passa il mouse sull’algoritmo nella finestra degli strumenti di elaborazione. Il dizionario dei parametri fornisce i Nomi e i valori dei parametri. Vedi Usare gli algoritmi di Processing dalla console dei comandi per dettagli su come eseguire algoritmi di elaborazione dalla console Python.
28.1.13.8. Riduzione (in base al raggio di campionamento)
Crea una versione ridotta della nuvola di punti eseguendo un campionamento per distanza dei punti (riduce il numero di punti entro un certo raggio).

Fig. 28.15 Riduzione della nuvola di punti (in base al raggio di campionamento)
Vedi anche
Parametri
Parametri di Base
Etichetta |
Nome |
Tipo |
Descrizione |
|---|---|---|---|
Layer in ingresso |
|
[point cloud] |
Layer nuvola di punti in ingresso da cui creare una versione ridotta |
Raggio di campionamento (in unità mappa) |
|
[number] Predefinito: 1.0 |
Distanza entro la quale i punti sono ridotti a un unico punto |
Ridotto (in base al raggio) |
|
[point cloud] Predefinito: |
Specificare il risultato della nuvola di punti con punti ridotti. Uno di:
|
Parametri Avanzati
Etichetta |
Nome |
Tipo |
Descrizione |
|---|---|---|---|
Espressione filtro Opzionale |
|
[expression] |
Una PDAL expression per selezionare un sottoinsieme di elementi nei dati della nuvola di punti |
Estensione su cui applicare l’algoritmo Opzionale |
|
[extent] |
Un’estensione della mappa per selezionare un sottoinsieme di elementi nei dati della nuvola di punti I metodi disponibili sono:
|
In uscita:
Etichetta |
Nome |
Tipo |
Descrizione |
|---|---|---|---|
Ridotto (in base al raggio) |
|
[point cloud] |
Layer nuvola di punti in uscita con punti ridotti. |
Codice Python
ID Algoritmo: pdal:thinbyradius
import processing
processing.run("algorithm_id", {parameter_dictionary})
L” id dell’algoritmo viene visualizzato quando si passa il mouse sull’algoritmo nella finestra degli strumenti di elaborazione. Il dizionario dei parametri fornisce i Nomi e i valori dei parametri. Vedi Usare gli algoritmi di Processing dalla console dei comandi per dettagli su come eseguire algoritmi di elaborazione dalla console Python.
28.1.13.9. Ridurre (ignorando punti)
Crea una versione ridotta della nuvola di punti mantenendo solo ogni N-esimo punto (riduce il numero di punti saltando i punti vicini).
Parametri
Parametri di Base
Etichetta |
Nome |
Tipo |
Descrizione |
|---|---|---|---|
Layer in ingresso |
|
[point cloud] |
Layer nuvola di punti in ingresso da cui creare una versione ridotta |
Numero di punti da ignorare |
|
[number] Predefinito: 1 |
Mantenere solo ogni N-esimo punto nel layer in ingresso |
Ridotta (per decimazione) |
|
[point cloud] Predefinito: |
Specificare il risultato della nuvola di punti con punti ridotti. Uno di:
|
Parametri Avanzati
Etichetta |
Nome |
Tipo |
Descrizione |
|---|---|---|---|
Espressione filtro Opzionale |
|
[expression] |
Una PDAL expression per selezionare un sottoinsieme di elementi nei dati della nuvola di punti |
Estensione su cui applicare l’algoritmo Opzionale |
|
[extent] |
Un’estensione della mappa per selezionare un sottoinsieme di elementi nei dati della nuvola di punti I metodi disponibili sono:
|
In uscita:
Etichetta |
Nome |
Tipo |
Descrizione |
|---|---|---|---|
Ridotta (per decimazione) |
|
[point cloud] |
Layer nuvola di punti in uscita con punti ridotti. |
Codice Python
ID Algoritmo: pdal:thinbydecimate
import processing
processing.run("algorithm_id", {parameter_dictionary})
L” id dell’algoritmo viene visualizzato quando si passa il mouse sull’algoritmo nella finestra degli strumenti di elaborazione. Il dizionario dei parametri fornisce i Nomi e i valori dei parametri. Vedi Usare gli algoritmi di Processing dalla console dei comandi per dettagli su come eseguire algoritmi di elaborazione dalla console Python.
28.1.13.10. Tassello
Crea tasselli da file di nuvole di punti in ingresso, consigliati per ottenere le migliori prestazioni (nella visualizzazione o nell’analisi) con tali set di dati in QGIS.
Vedi anche
Parametri
Parametri di Base
Etichetta |
Nome |
Tipo |
Descrizione |
|---|---|---|---|
Layer in ingresso |
|
[point cloud] [list] |
Layer della nuvola di punti in ingresso da cui creare i tasselli |
Lunghezza tassello |
|
[number] Predefinito: 1000.0 |
Dimensione del bordo di ciascun tassello generato |
Cartella in uscita |
|
[folder] Predefinito: |
Specifica la cartella in cui memorizzare i tasselli generati. Una delle seguenti opzioni:
|
Parametri Avanzati
Etichetta |
Nome |
Tipo |
Descrizione |
|---|---|---|---|
Assegnare SR Opzionale |
|
[crs] |
Il SR da applicare al layer |
In uscita:
Etichetta |
Nome |
Tipo |
Descrizione |
|---|---|---|---|
Cartella in uscita |
|
[folder] |
Cartella risultato contenente i tasselli generati dai file in ingresso. |
Codice Python
ID Algoritmo: pdal:tile
import processing
processing.run("algorithm_id", {parameter_dictionary})
L” id dell’algoritmo viene visualizzato quando si passa il mouse sull’algoritmo nella finestra degli strumenti di elaborazione. Il dizionario dei parametri fornisce i Nomi e i valori dei parametri. Vedi Usare gli algoritmi di Processing dalla console dei comandi per dettagli su come eseguire algoritmi di elaborazione dalla console Python.