Svarbu
Vertimas yra bendruomenės pastangos, prie kurių jūs galite prisijungti. Šis puslapis šiuo metu išverstas 46.28%.
28.1.14. Taškų debesies ištraukimas
NEW in 3.32
Pastaba
Šie algoritmai galimi tik jei QGIS naudoja PDAL bibliotekos 2.5.0 ar naujesnę versiją.
28.1.14.1. Ribos
Eksportuoja poligono failą su taškų debesies sluoksnio ribomis. Jame gali būti skylės ir tai gali būti kelių dalių poligonas.
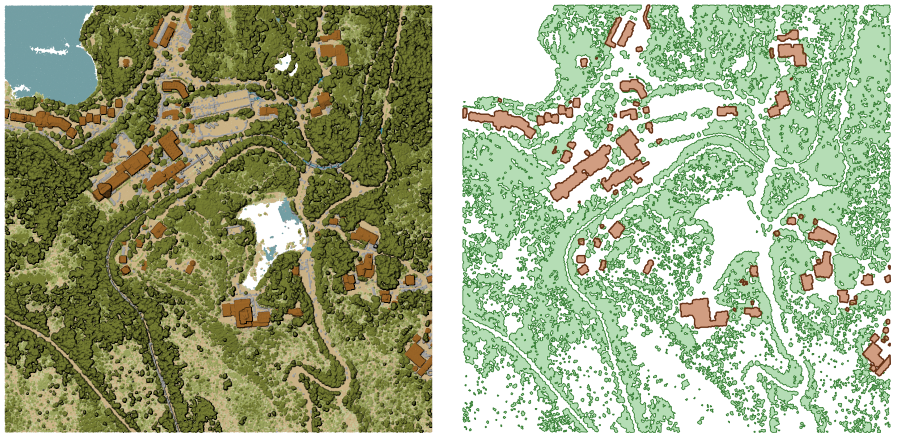
Fig. 28.16 Aukštos augmenijos ir pastatų poligonų ištraukimas iš įvesties taškų debesies sluoksnio
Parametrai
Baziniai parametrai
Užrašas |
Pavadinimas |
Tipas |
Aprašymas |
|---|---|---|---|
Įvesties sluoksnis |
|
[taškų debesis] |
Įvesties taškų debesies sluoksnis ribų skaičiavimui |
Resolution of cells used to calculate boundary Optional |
|
[number] |
Resolution of cells used to calculate boundary |
Minimal number of points in a cell to consider cell occupied Optional |
|
[number] |
Minimal number of points in a cell to consider cell occupied |
Boundary |
|
[vector: polygon] Numatytas: |
Nurodykite taškų debesies failą, kurį naudoti kaip išvestį. Vienas iš:
|
Advanced parameters
Užrašas |
Pavadinimas |
Tipas |
Aprašymas |
|---|---|---|---|
Filter expression Optional |
|
[expression] |
A PDAL expression for selecting a subset of features in the point cloud data |
Cropping extent Optional |
|
[extent] |
A map extent for selecting a subset of features in the point cloud data Available methods are:
|
Išvestys
Užrašas |
Pavadinimas |
Tipas |
Aprašymas |
|---|---|---|---|
Boundary |
|
[vector: polygon] |
Output polygon vector layer with the point cloud boundary.
Currently supported format is |
Python code
Algorithm ID: pdal:boundary
import processing
processing.run("algorithm_id", {parameter_dictionary})
The algorithm id is displayed when you hover over the algorithm in the Processing Toolbox. The parameter dictionary provides the parameter NAMEs and values. See Using processing algorithms from the console for details on how to run processing algorithms from the Python console.
28.1.14.2. Density
Exports a raster file based on the number of points within each raster cell - useful for quality checking of point cloud datasets.
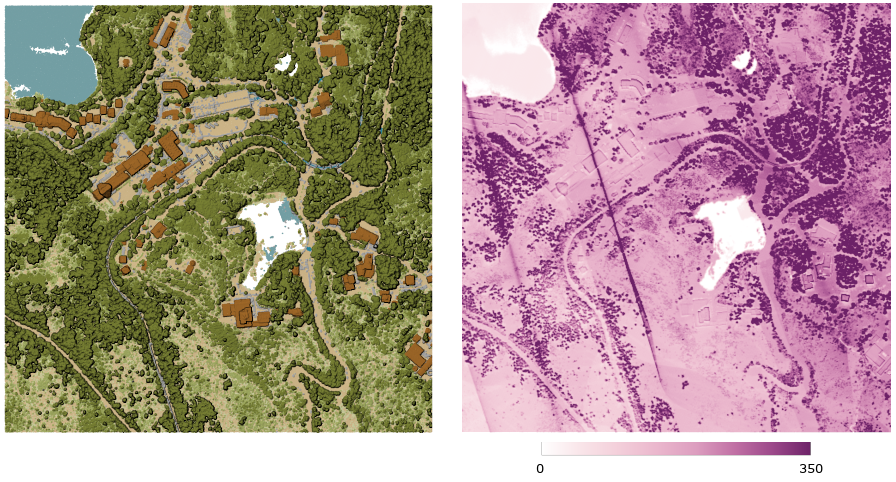
Fig. 28.17 Point density (number of points per 2x2 m) as a raster
Parametrai
Baziniai parametrai
Užrašas |
Pavadinimas |
Tipas |
Aprašymas |
|---|---|---|---|
Įvesties sluoksnis |
|
[taškų debesis] |
Input point cloud layer to export |
Resolution of the density raster |
|
[number] Default: 1.0 |
Cell size of the output raster |
Tile size for parallel runs |
|
[number] Default: 1000 |
Size of the tiles to split the data into for parallel runs |
Density |
|
[raster] Numatytas: |
Specify the raster file to export the data to. One of:
|
Advanced parameters
Užrašas |
Pavadinimas |
Tipas |
Aprašymas |
|---|---|---|---|
Filter expression Optional |
|
[expression] |
A PDAL expression for selecting a subset of features in the point cloud data |
Cropping extent Optional |
|
[extent] |
A map extent for selecting a subset of features in the point cloud data Available methods are:
|
X origin of a tile for parallel runs Optional |
|
[number] |
|
Y origin of a tile for parallel runs Optional |
|
[number] |
Išvestys
Užrašas |
Pavadinimas |
Tipas |
Aprašymas |
|---|---|---|---|
Density |
|
[raster] |
Output raster layer with number of points within each cell.
Currently supported format is |
Python code
Algorithm ID: pdal:density
import processing
processing.run("algorithm_id", {parameter_dictionary})
The algorithm id is displayed when you hover over the algorithm in the Processing Toolbox. The parameter dictionary provides the parameter NAMEs and values. See Using processing algorithms from the console for details on how to run processing algorithms from the Python console.
28.1.14.3. Filter
Extracts point from the input point cloud which match PDAL expression and/or are inside of a cropping rectangle.
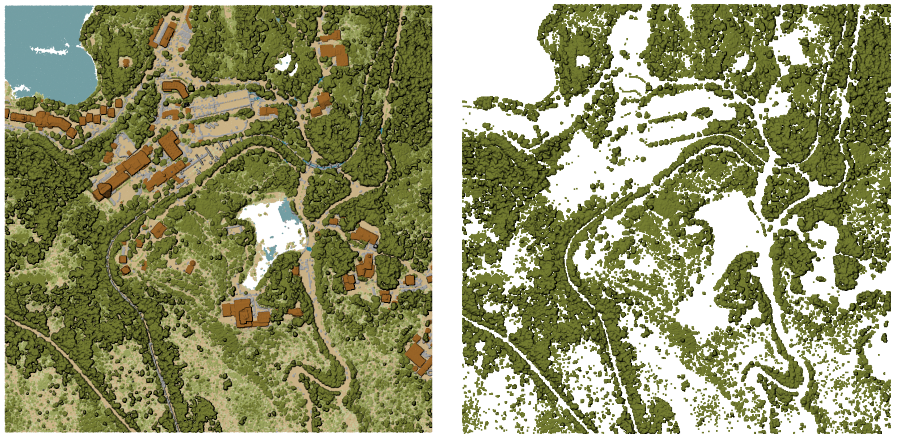
Fig. 28.18 Filtering of high vegetation class from an input point cloud layer
Parametrai
Užrašas |
Pavadinimas |
Tipas |
Aprašymas |
|---|---|---|---|
Įvesties sluoksnis |
|
[taškų debesis] |
Input point cloud layer to export |
Filter expression Optional |
|
[expression] |
A PDAL expression for selecting a subset of features in the point cloud data |
Cropping extent Optional |
|
[extent] |
A map extent for selecting a subset of features in the point cloud data Available methods are:
|
Filtered |
|
[taškų debesis] Numatytas: |
Specify the point cloud file to export the data to. One of:
|
Išvestys
Užrašas |
Pavadinimas |
Tipas |
Aprašymas |
|---|---|---|---|
Filtered |
|
[taškų debesis] |
Output point cloud layer with the filtered features of the input point cloud layer.
Currently supported formats are |
Python code
Algorithm ID: pdal:filter
import processing
processing.run("algorithm_id", {parameter_dictionary})
The algorithm id is displayed when you hover over the algorithm in the Processing Toolbox. The parameter dictionary provides the parameter NAMEs and values. See Using processing algorithms from the console for details on how to run processing algorithms from the Python console.