Importante
La traducción es un esfuerzo comunitario al que puedes unirte. Esta página está actualmente traducida en 87.45%.
28.1.12. Point Cloud Conversion
NEW in 3.32
28.1.12.1. Convertir formato
Converts a point cloud to a different file format, e.g. creates a compressed .LAZ.
Parámetros
Etiqueta |
Nombre |
Tipo |
Descripción |
|---|---|---|---|
Capa de entrada |
|
[nube de puntos] |
Input point cloud layer to convert |
Convertido |
|
[nube de puntos] Predeterminado: |
Especifique el archivo de nube de puntos que se utilizará como salida. Uno de:
|
Salidas
Etiqueta |
Nombre |
Tipo |
Descripción |
|---|---|---|---|
Convertido |
|
[nube de puntos] |
Output point cloud layer in a modified file format.
Currently supported formats are |
Código Python
Algorithm ID: pdal:convertformat
import processing
processing.run("algorithm_id", {parameter_dictionary})
El algoritmo id se muestra al desplazarse sobre el algoritmo en la Caja de Herramientas de Procesamiento. El parámetro diccionario suministra los NOMBREs y valores de los parámetros. Ver consola_procesamiento para detalles sobre como ejecutar algoritmos desde la consola Python.
28.1.12.2. Export to raster
Exports point cloud data to a 2D raster grid having cell size of given resolution, writing values from the specified attribute.
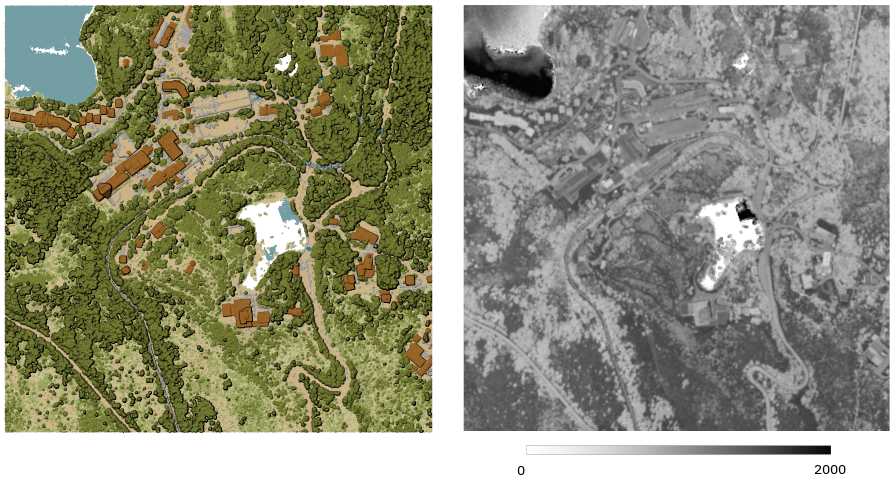
Figura 28.10 Raster output using Intensity attribute of points
Parámetros
Parámetros básicos
Etiqueta |
Nombre |
Tipo |
Descripción |
|---|---|---|---|
Capa de entrada |
|
[nube de puntos] |
Capa de nube de puntos de entrada para exportar |
Atributo |
|
[field] [enumeration] |
A Field of the point cloud layer to extract the values from |
Resolución del ráster de densidad |
|
[número] Predeterminado: 1.0 |
Tamaño de celda del raster de salida |
Tamaño de las baldosas para recorridos paralelos |
|
[número] Preestablecido: 1000 |
|
Exported |
|
[raster] Predeterminado: |
Especifique el archivo raster al que exportar los datos. Uno de:
|
Parámetros avanzados
Etiqueta |
Nombre |
Tipo |
Descripción |
|---|---|---|---|
Expresión de filtrado Opcional |
|
[expresión] |
A PDAL expression for selecting a subset of features in the point cloud data |
Extensión del cultivo Opcional |
|
[extensión] |
Una extensión del mapa para seleccionar un subconjunto de objetos espaciales en los datos de la nube de puntos Los métodos disponibles son:
|
Origen X de una tesela para recorridos paralelos Opcional |
|
[número] |
|
Origen Y de una tesela para ejecuciones paralelas Opcional |
|
[número] |
Salidas
Etiqueta |
Nombre |
Tipo |
Descripción |
|---|---|---|---|
Exported |
|
[raster] |
Output raster layer features of the point cloud layer are exported to.
Currently supported format is |
Código Python
Algorithm ID: pdal:exportraster
import processing
processing.run("algorithm_id", {parameter_dictionary})
El algoritmo id se muestra al desplazarse sobre el algoritmo en la Caja de Herramientas de Procesamiento. El parámetro diccionario suministra los NOMBREs y valores de los parámetros. Ver consola_procesamiento para detalles sobre como ejecutar algoritmos desde la consola Python.
28.1.12.3. Export raster (using triangulation)
Exports point cloud data to a 2D raster grid using a triangulation of points and then interpolating cell values from triangles.
Nota
Using this algorithm can be slower if you are dealing with a large dataset. If your point cloud is dense, you can export your ground points as a raster using the Export to raster algorithm.
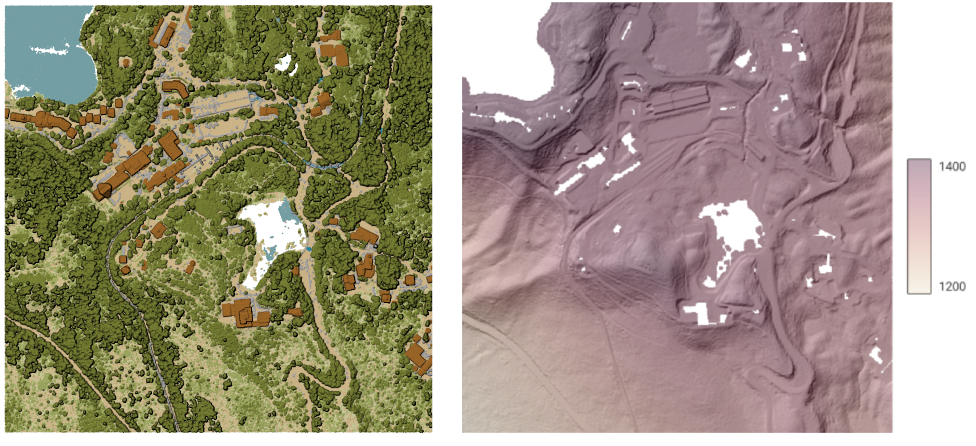
Figura 28.11 Raster del terreno generado por triangulación de nubes de puntos
Parámetros
Parámetros básicos
Etiqueta |
Nombre |
Tipo |
Descripción |
|---|---|---|---|
Capa de entrada |
|
[nube de puntos] |
Capa de nube de puntos de entrada para exportar |
Resolución del ráster de densidad |
|
[número] Predeterminado: 1.0 |
Tamaño de celda del raster de salida |
Tamaño de las baldosas para recorridos paralelos |
|
[número] Preestablecido: 1000 |
|
Exported |
|
[raster] Predeterminado: |
Especifique el archivo raster al que exportar los datos. Uno de:
|
Parámetros avanzados
Etiqueta |
Nombre |
Tipo |
Descripción |
|---|---|---|---|
Expresión de filtrado Opcional |
|
[expresión] |
A PDAL expression for selecting a subset of features in the point cloud data |
Extensión del cultivo Opcional |
|
[extensión] |
Una extensión del mapa para seleccionar un subconjunto de objetos espaciales en los datos de la nube de puntos Los métodos disponibles son:
|
Origen X de una tesela para recorridos paralelos Opcional |
|
[número] |
|
Origen Y de una tesela para ejecuciones paralelas Opcional |
|
[número] |
Salidas
Etiqueta |
Nombre |
Tipo |
Descripción |
|---|---|---|---|
Exportado (usando triangulación) |
|
[raster] |
Output raster layer features of the point cloud layer are exported to.
Currently supported format is |
Código Python
Identificación del algoritmo: pdal:exportrastertin
import processing
processing.run("algorithm_id", {parameter_dictionary})
El algoritmo id se muestra al desplazarse sobre el algoritmo en la Caja de Herramientas de Procesamiento. El parámetro diccionario suministra los NOMBREs y valores de los parámetros. Ver consola_procesamiento para detalles sobre como ejecutar algoritmos desde la consola Python.
28.1.12.4. Exportar a vector
Exporta datos de nubes de puntos a una capa vectorial con puntos 3D (un GeoPackage), opcionalmente con atributos extra.
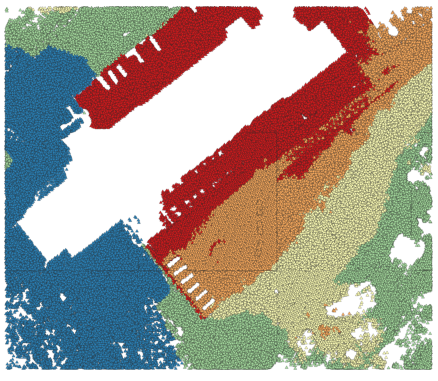
Figura 28.12 Exportación de la nube de puntos (puntos del terreno) a una capa vectorial con un estilo basado en la elevación
Parámetros
Parámetros básicos
Etiqueta |
Nombre |
Tipo |
Descripción |
|---|---|---|---|
Capa de entrada |
|
[nube de puntos] |
Capa de nube de puntos de entrada para exportar |
Atributo Opcional |
|
[field] [list] |
One or more fields of the point cloud layer to export with the points. |
Exported |
|
[vector] Predeterminado: |
Specify the vector file to export the data to. One of:
|
Parámetros avanzados
Etiqueta |
Nombre |
Tipo |
Descripción |
|---|---|---|---|
Expresión de filtrado Opcional |
|
[expresión] |
A PDAL expression for selecting a subset of features in the point cloud data |
Extensión del cultivo Opcional |
|
[extensión] |
Una extensión del mapa para seleccionar un subconjunto de objetos espaciales en los datos de la nube de puntos Los métodos disponibles son:
|
Salidas
Etiqueta |
Nombre |
Tipo |
Descripción |
|---|---|---|---|
Exported |
|
[vector] |
Output vector layer features of the point cloud layer are exported to.
Currently supported format is |
Código Python
Algorithm ID: pdal:exportvector
import processing
processing.run("algorithm_id", {parameter_dictionary})
El algoritmo id se muestra al desplazarse sobre el algoritmo en la Caja de Herramientas de Procesamiento. El parámetro diccionario suministra los NOMBREs y valores de los parámetros. Ver consola_procesamiento para detalles sobre como ejecutar algoritmos desde la consola Python.