Importante
La traducción es un esfuerzo comunitario al que puedes unirte. Esta página está actualmente traducida en 84.57%.
28.1.13. Gestión de datos de nubes de puntos
NEW in 3.32
28.1.13.1. Asignar proyección
Asigna un Sistema de Referencia de Coordenadas a una capa de nube de puntos, si falta o es incorrecto. Se crea una nueva capa.
Ver también
Parametros
Etiqueta |
Nombre |
Tipo |
Descripción |
|---|---|---|---|
Capa de entrada |
|
[nube de puntos] |
Capa de nube de puntos de entrada a la que asignar un SRC |
SRC Deseado |
|
[src] |
El SRC que se aplicará a la capa |
Capa de salida |
|
[nube de puntos] Predeterinado: |
Especifique el archivo de nube de puntos que se utilizará como salida. Uno de:
|
Salidas
Etiqueta |
Nombre |
Tipo |
Descripción |
|---|---|---|---|
Convertido |
|
[nube de puntos] |
Capa de nube de puntos de salida con un nuevo SRC. Los formatos actualmente admitidos son |
Código Python
Identificación del algoritmo: pdal:assignprojection
import processing
processing.run("algorithm_id", {parameter_dictionary})
El algoritmo id se muestra cuando pasa el cursor sobre el algoritmo en la caja de herramientas de procesos. El diccionario de parámetros proporciona los NOMBRES y valores de los parámetros. Consulte Utilizar algoritmos de procesamiento desde la consola para obtener detalles sobre cómo ejecutar algoritmos de procesamiento desde la consola de Python.
28.1.13.2. Crear una nube de puntos virtual (VPC)
Creates a virtual point cloud (VPC) from input point cloud data.
Si deja los parámetros opcionales sin marcar, el archivo VPC se construirá muy rápidamente ya que el algoritmo sólo leerá los metadatos de los archivos de entrada. Con cualquiera de los parámetros opcionales activados, el algoritmo leerá todos los puntos, lo que puede llevar algún tiempo.

Figura 28.13 Generación de nubes de puntos virtuales con visión de conjunto a partir de un conjunto de mosaicos de nubes de puntos
Ver también
Parametros
Etiqueta |
Nombre |
Tipo |
Descripción |
|---|---|---|---|
Capas de entrada |
|
[point cloud] [list] |
Capas de nubes de puntos de entrada para combinar dentro de una capa de nube de puntos virtual |
Calcular polígono límite |
|
[booleano] Predeterminado: Falso |
Establecer en True para mostrar los límites exactos de los datos (en lugar de sólo la extensión rectangular) |
Calcular estadísticas |
|
[booleano] Predeterminado: Falso |
Establecer en True para comprender los rangos de valores de los distintos atributos |
Construir una nube de puntos general |
|
[booleano] Predeterminado: Falso |
Genera una única nube de puntos «diluida» de todos los datos de entrada (utilizando sólo cada 1000 puntos de los datos originales). La nube de puntos de visión general se creará junto al archivo VPC - por ejemplo, para |
Nube de puntos virtual |
|
[nube de puntos] Predeterinado: |
Especifique el archivo de nube de puntos para construir los datos. Uno de:
|
Salidas
Etiqueta |
Nombre |
Tipo |
Descripción |
|---|---|---|---|
Nube de puntos virtual |
|
[ráster] |
Capa de nube de puntos de salida que combina todos los datos de entrada, como archivo virtual. |
Código Python
Identificación del algoritmo: pdal:virtualpointcloud
import processing
processing.run("algorithm_id", {parameter_dictionary})
El algoritmo id se muestra cuando pasa el cursor sobre el algoritmo en la caja de herramientas de procesos. El diccionario de parámetros proporciona los NOMBRES y valores de los parámetros. Consulte Utilizar algoritmos de procesamiento desde la consola para obtener detalles sobre cómo ejecutar algoritmos de procesamiento desde la consola de Python.
28.1.13.3. Cortar
Recorta una capa de nube de puntos por una capa de polígonos para que la nube de puntos resultante contenga sólo puntos dentro de los polígonos.
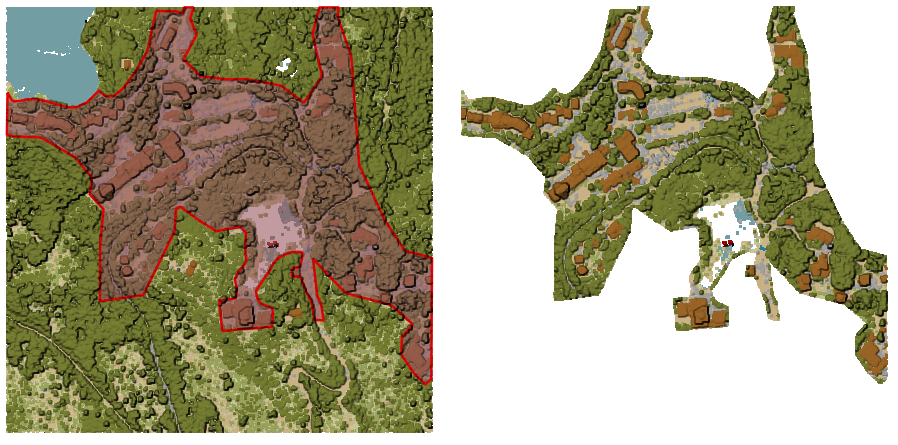
Figura 28.14 Recorte de una capa de nube de puntos de entrada con una cobertura poligonal
Parametros
Parámetros básicos
Etiqueta |
Nombre |
Tipo |
Descripción |
|---|---|---|---|
Capa de entrada |
|
[nube de puntos] |
Capa de la nube de puntos de entrada para recortar |
Clipping polygons |
|
[vectorial: poligonal] |
Polygon vector layer to use as coverage for clipping the points |
Cortadas |
|
[nube de puntos] Predeterinado: |
Specify the point cloud file to export the clipped points to. One of:
|
Parámetros avanzados
Etiqueta |
Nombre |
Tipo |
Descripción |
|---|---|---|---|
Expresión de filtrado Opcional |
|
[expresión] |
A PDAL expression for selecting a subset of features in the point cloud data |
Extensión del cultivo Opcional |
|
[extensión] |
Una extensión del mapa para seleccionar un subconjunto de objetos espaciales en los datos de la nube de puntos Los métodos disponibles son:
|
Salidas
Etiqueta |
Nombre |
Tipo |
Descripción |
|---|---|---|---|
Cortadas |
|
[ráster] |
Output point cloud whose features are the points within the coverage polygon layer. |
Código Python
Algorithm ID: pdal:clip
import processing
processing.run("algorithm_id", {parameter_dictionary})
El algoritmo id se muestra cuando pasa el cursor sobre el algoritmo en la caja de herramientas de procesos. El diccionario de parámetros proporciona los NOMBRES y valores de los parámetros. Consulte Utilizar algoritmos de procesamiento desde la consola para obtener detalles sobre cómo ejecutar algoritmos de procesamiento desde la consola de Python.
28.1.13.4. Create COPC
Creates the index for all the input point cloud files in a batch mode.
Parametros
Etiqueta |
Nombre |
Tipo |
Descripción |
|---|---|---|---|
Capas de entrada |
|
[point cloud] [list] |
Input point cloud layers to create an index for |
Directorio de salida Opcional |
|
[carpeta] Preestablecido: |
Specify the folder to create the new files in. One of:
|
Salidas
Etiqueta |
Nombre |
Tipo |
Descripción |
|---|---|---|---|
Directorio de salida |
|
[carpeta] |
Output folder containing point cloud layers with accompanying COPC index files. |
Código Python
Algorithm ID: pdal:createcopc
import processing
processing.run("algorithm_id", {parameter_dictionary})
El algoritmo id se muestra cuando pasa el cursor sobre el algoritmo en la caja de herramientas de procesos. El diccionario de parámetros proporciona los NOMBRES y valores de los parámetros. Consulte Utilizar algoritmos de procesamiento desde la consola para obtener detalles sobre cómo ejecutar algoritmos de procesamiento desde la consola de Python.
28.1.13.5. Information
Outputs basic metadata from an input point cloud file.
Example of output information:
LAS 1.4
point format 6
count 56736130
scale 0.001 0.001 0.001
offset 431749.999 5440919.999 968.898
extent 431250 5440420 424.266
432249.999 5441419.999 1513.531
crs ETRS89 / UTM zone 34N (N-E) (EPSG:3046) (vertical CRS missing!)
units horizontal=metre vertical=unknown
Attributes:
- X floating 8
- Y floating 8
- Z floating 8
- Intensity unsigned 2
- ReturnNumber unsigned 1
- NumberOfReturns unsigned 1
- ScanDirectionFlag unsigned 1
- EdgeOfFlightLine unsigned 1
- Classification unsigned 1
- ScanAngleRank floating 4
- UserData unsigned 1
- PointSourceId unsigned 2
- GpsTime floating 8
- ScanChannel unsigned 1
- ClassFlags unsigned 1
Parametros
Etiqueta |
Nombre |
Tipo |
Descripción |
|---|---|---|---|
Capa de entrada |
|
[nube de puntos] |
Input point cloud layer to extract metadata information from |
Información de la capa |
|
[archivo] Predeterinado: |
Specify the file to store the metadata information. One of:
|
Salidas
Etiqueta |
Nombre |
Tipo |
Descripción |
|---|---|---|---|
Información de la capa |
|
[vector] |
|
Código Python
Algorithm ID: pdal:info
import processing
processing.run("algorithm_id", {parameter_dictionary})
El algoritmo id se muestra cuando pasa el cursor sobre el algoritmo en la caja de herramientas de procesos. El diccionario de parámetros proporciona los NOMBRES y valores de los parámetros. Consulte Utilizar algoritmos de procesamiento desde la consola para obtener detalles sobre cómo ejecutar algoritmos de procesamiento desde la consola de Python.
28.1.13.6. Mezclar
Merges multiple point cloud files into a single one.
Ver también
Parametros
Parámetros básicos
Etiqueta |
Nombre |
Tipo |
Descripción |
|---|---|---|---|
Capas de entrada |
|
[point cloud] [list] |
Input point cloud layers to merge into a single one |
Mezclado |
|
[nube de puntos] Predeterinado: |
Specify the output point cloud merging input files. One of:
|
Parámetros avanzados
Etiqueta |
Nombre |
Tipo |
Descripción |
|---|---|---|---|
Expresión de filtrado Opcional |
|
[expresión] |
A PDAL expression for selecting a subset of features in the point cloud data |
Extensión del cultivo Opcional |
|
[extensión] |
Una extensión del mapa para seleccionar un subconjunto de objetos espaciales en los datos de la nube de puntos Los métodos disponibles son:
|
Salidas
Etiqueta |
Nombre |
Tipo |
Descripción |
|---|---|---|---|
Mezclado |
|
[nube de puntos] |
Output point cloud layer merging all the input files. |
Código Python
Algorithm ID: pdal:merge
import processing
processing.run("algorithm_id", {parameter_dictionary})
El algoritmo id se muestra cuando pasa el cursor sobre el algoritmo en la caja de herramientas de procesos. El diccionario de parámetros proporciona los NOMBRES y valores de los parámetros. Consulte Utilizar algoritmos de procesamiento desde la consola para obtener detalles sobre cómo ejecutar algoritmos de procesamiento desde la consola de Python.
28.1.13.7. Reproject
Reprojects a point cloud to a different Coordinate Reference System (CRS).
Ver también
Parametros
Etiqueta |
Nombre |
Tipo |
Descripción |
|---|---|---|---|
Capa de entrada |
|
[nube de puntos] |
Input point cloud layer to reproject to a different CRS |
SRC destino |
|
[src] |
El SRC que se aplicará a la capa |
Reproyectado |
|
[nube de puntos] Predeterinado: |
Specify the reprojected point cloud file. One of:
|
Parámetros avanzados
Etiqueta |
Nombre |
Tipo |
Descripción |
|---|---|---|---|
Coordinate operation Opcional |
|
[datum] |
The datum transformation to use to reproject the data between the origin and target systems. |
Salidas
Etiqueta |
Nombre |
Tipo |
Descripción |
|---|---|---|---|
REPROJECTED |
|
[nube de puntos] |
Output point cloud layer in the target CRS. |
Código Python
Algorithm ID: pdal:reproject
import processing
processing.run("algorithm_id", {parameter_dictionary})
El algoritmo id se muestra cuando pasa el cursor sobre el algoritmo en la caja de herramientas de procesos. El diccionario de parámetros proporciona los NOMBRES y valores de los parámetros. Consulte Utilizar algoritmos de procesamiento desde la consola para obtener detalles sobre cómo ejecutar algoritmos de procesamiento desde la consola de Python.
28.1.13.8. Thin (by sampling radius)
Creates a thinned version of the point cloud by performing sampling by distance point (reduces the number of points within a certain radius).

Figura 28.15 Thining point cloud (by sampling radius)
Ver también
Parametros
Parámetros básicos
Etiqueta |
Nombre |
Tipo |
Descripción |
|---|---|---|---|
Capa de entrada |
|
[nube de puntos] |
Input point cloud layer to create a thinned version from |
Sampling radius (in map units) |
|
[número] Predeterminado: 1.0 |
Distance within which points are sampled to a unique point |
Thinned (by radius) |
|
[nube de puntos] Predeterinado: |
Specify the output point cloud with reduced points. One of:
|
Parámetros avanzados
Etiqueta |
Nombre |
Tipo |
Descripción |
|---|---|---|---|
Expresión de filtrado Opcional |
|
[expresión] |
A PDAL expression for selecting a subset of features in the point cloud data |
Extensión del cultivo Opcional |
|
[extensión] |
Una extensión del mapa para seleccionar un subconjunto de objetos espaciales en los datos de la nube de puntos Los métodos disponibles son:
|
Salidas
Etiqueta |
Nombre |
Tipo |
Descripción |
|---|---|---|---|
Thinned (by radius) |
|
[nube de puntos] |
Output point cloud layer with reduced points. |
Código Python
Algorithm ID: pdal:thinbyradius
import processing
processing.run("algorithm_id", {parameter_dictionary})
El algoritmo id se muestra cuando pasa el cursor sobre el algoritmo en la caja de herramientas de procesos. El diccionario de parámetros proporciona los NOMBRES y valores de los parámetros. Consulte Utilizar algoritmos de procesamiento desde la consola para obtener detalles sobre cómo ejecutar algoritmos de procesamiento desde la consola de Python.
28.1.13.9. Thin (by skipping points)
Creates a thinned version of the point cloud by keeping only every N-th point (reduces the number of points by skipping nearby points).
Ver también
Parametros
Parámetros básicos
Etiqueta |
Nombre |
Tipo |
Descripción |
|---|---|---|---|
Capa de entrada |
|
[nube de puntos] |
Input point cloud layer to create a thinned version from |
Number of points to skip |
|
[número] Predeterminado: 1 |
Keep only every N-th point in the input layer |
Thinned (by decimation) |
|
[nube de puntos] Predeterinado: |
Specify the output point cloud with reduced points. One of:
|
Parámetros avanzados
Etiqueta |
Nombre |
Tipo |
Descripción |
|---|---|---|---|
Expresión de filtrado Opcional |
|
[expresión] |
A PDAL expression for selecting a subset of features in the point cloud data |
Extensión del cultivo Opcional |
|
[extensión] |
Una extensión del mapa para seleccionar un subconjunto de objetos espaciales en los datos de la nube de puntos Los métodos disponibles son:
|
Salidas
Etiqueta |
Nombre |
Tipo |
Descripción |
|---|---|---|---|
Thinned (by decimation) |
|
[nube de puntos] |
Output point cloud layer with reduced points. |
Código Python
Algorithm ID: pdal:thinbydecimate
import processing
processing.run("algorithm_id", {parameter_dictionary})
El algoritmo id se muestra cuando pasa el cursor sobre el algoritmo en la caja de herramientas de procesos. El diccionario de parámetros proporciona los NOMBRES y valores de los parámetros. Consulte Utilizar algoritmos de procesamiento desde la consola para obtener detalles sobre cómo ejecutar algoritmos de procesamiento desde la consola de Python.
28.1.13.10. Tile
Creates tiles from input point cloud files, recommended for best performance (in display or analysis) with such datasets in QGIS.
Ver también
Parametros
Parámetros básicos
Etiqueta |
Nombre |
Tipo |
Descripción |
|---|---|---|---|
Capas de entrada |
|
[point cloud] [list] |
Input point cloud layers to create tiles from |
Tile length |
|
[número] Default: 1000.0 |
Size of the edge of each generated tile |
Directorio de salida |
|
[carpeta] Predeterminado: |
Specify the folder to store the generated tiles. One of:
|
Parámetros avanzados
Etiqueta |
Nombre |
Tipo |
Descripción |
|---|---|---|---|
Assign CRS Opcional |
|
[src] |
El SRC que se aplicará a la capa |
Salidas
Etiqueta |
Nombre |
Tipo |
Descripción |
|---|---|---|---|
Directorio de salida |
|
[carpeta] |
Output folder containing the tiles generated from input files. |
Código Python
Algorithm ID: pdal:tile
import processing
processing.run("algorithm_id", {parameter_dictionary})
El algoritmo id se muestra cuando pasa el cursor sobre el algoritmo en la caja de herramientas de procesos. El diccionario de parámetros proporciona los NOMBRES y valores de los parámetros. Consulte Utilizar algoritmos de procesamiento desde la consola para obtener detalles sobre cómo ejecutar algoritmos de procesamiento desde la consola de Python.