重要
翻訳は あなたが参加できる コミュニティの取り組みです。このページは現在 85.26% 翻訳されています。
24.1.17. 点群の抽出
注意
Running these algorithms requires QGIS installed with PDAL >= 2.5.0 (see menu).
24.1.17.1. トポロジカル境界
Added in 3.32
点群レイヤーの境界を含むポリゴンファイルをエクスポートします。 ポリゴンファイルには穴が含まれている場合やマルチパートポリゴンである場合があります。
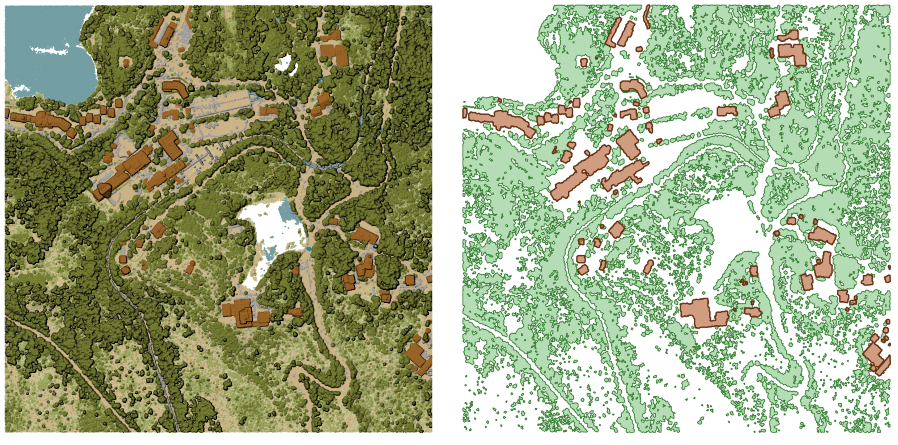
図 24.47 入力点群レイヤーから高い植生と建物のポリゴンを抽出する
パラメータ
基本パラメータ
ラベル |
名前 |
データ型 |
説明 |
|---|---|---|---|
入力レイヤ |
|
[点群] |
トポロジカル境界を算出する点群レイヤを指定 |
トポロジカル境界の算出に使用するセルの解像度 オプション |
|
[数値: double] |
トポロジカル境界の算出に使用するセルの解像度 |
セルが占有されているとみなすための、セル内の最小点数 オプション |
|
[数値: Integer] |
セルが占有されているとみなすための、セル内の点の数の最小値 |
トポロジカル境界 |
|
[ベクタ:ポリゴン] デフォルト: |
出力として使用する点群ファイルを指定します。次のいずれかです:
|
詳細パラメータ
ラベル |
名前 |
データ型 |
説明 |
|---|---|---|---|
フィルタ式 オプション |
|
[式] |
点群データ内の地物のサブセットを選択するための PDAL式 |
切り抜く範囲 オプション |
|
[範囲] |
点群データ内の地物のサブセットを選択するためのマップ範囲 利用可能な方法:
|
出力
ラベル |
名前 |
データ型 |
説明 |
|---|---|---|---|
トポロジカル境界 |
|
[ベクタ:ポリゴン] |
Output polygon vector layer with the point cloud boundary.
Currently supported format is |
Python コード
Algorithm ID: pdal:boundary
import processing
processing.run("algorithm_id", {parameter_dictionary})
algorithm id は、プロセシングツールボックス内でアルゴリズムにマウスカーソルを乗せた際に表示されるIDです。 parameter dictionary は、パラメータの「名前」とその値を指定するマッピング型です。Python コンソールからプロセシングアルゴリズムを実行する方法の詳細については、 プロセシングアルゴリズムをコンソールから使う を参照してください。
24.1.17.2. Density
Added in 3.32
Exports a raster file based on the number of points within each raster cell - useful for quality checking of point cloud datasets.
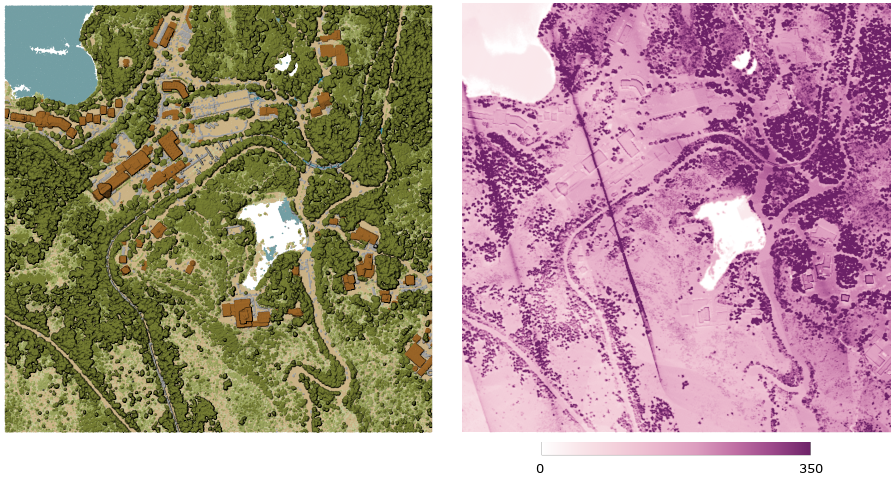
図 24.48 Point density (number of points per 2x2 m) as a raster
パラメータ
基本パラメータ
ラベル |
名前 |
データ型 |
説明 |
|---|---|---|---|
入力レイヤ |
|
[点群] |
Input point cloud layer to export |
Resolution of the density raster |
|
[数値: double] デフォルト: 1.0 |
Cell size of the output raster |
Tile size for parallel runs |
|
[数値: Integer] デフォルト: 1000 |
Size of the tiles to split the data into for parallel runs |
Density |
|
[ラスタ] デフォルト: |
Specify the raster file to export the data to. One of:
|
詳細パラメータ
ラベル |
名前 |
データ型 |
説明 |
|---|---|---|---|
フィルタ式 オプション |
|
[式] |
点群データ内の地物のサブセットを選択するための PDAL式 |
切り抜く範囲 オプション |
|
[範囲] |
点群データ内の地物のサブセットを選択するためのマップ範囲 利用可能な方法:
|
X origin of a tile for parallel runs オプション |
|
[数値: double] |
|
Y origin of a tile for parallel runs オプション |
|
[数値: double] |
出力
ラベル |
名前 |
データ型 |
説明 |
|---|---|---|---|
Density |
|
[ラスタ] |
Output raster layer with number of points within each cell.
Currently supported format is |
Python コード
Algorithm ID: pdal:density
import processing
processing.run("algorithm_id", {parameter_dictionary})
algorithm id は、プロセシングツールボックス内でアルゴリズムにマウスカーソルを乗せた際に表示されるIDです。 parameter dictionary は、パラメータの「名前」とその値を指定するマッピング型です。Python コンソールからプロセシングアルゴリズムを実行する方法の詳細については、 プロセシングアルゴリズムをコンソールから使う を参照してください。
24.1.17.3. Filter
Added in 3.32
Extracts point from the input point cloud which match PDAL expression and/or are inside of a cropping rectangle.
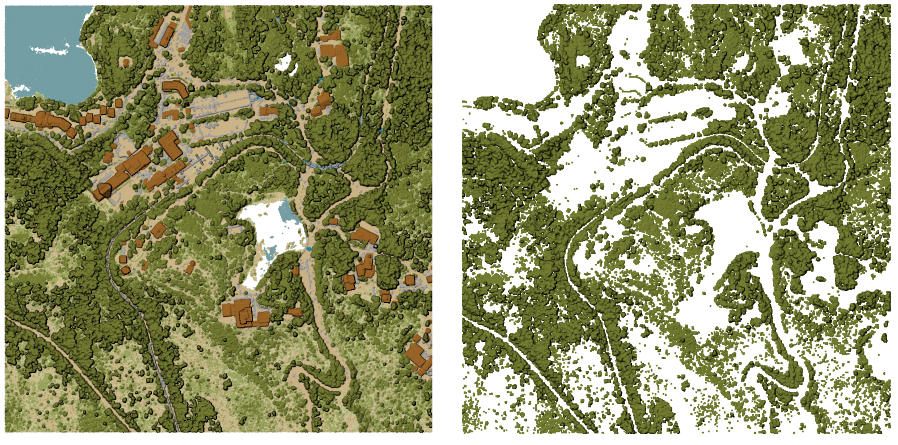
図 24.49 Filtering of high vegetation class from an input point cloud layer
パラメータ
ラベル |
名前 |
データ型 |
説明 |
|---|---|---|---|
入力レイヤ |
|
[点群] |
Input point cloud layer to export |
フィルタ式 オプション |
|
[式] |
点群データ内の地物のサブセットを選択するための PDAL式 |
切り抜く範囲 オプション |
|
[範囲] |
点群データ内の地物のサブセットを選択するためのマップ範囲 利用可能な方法:
|
出力レイヤ |
|
[点群] デフォルト: |
Specify the point cloud file to export the data to. One of:
|
出力
ラベル |
名前 |
データ型 |
説明 |
|---|---|---|---|
出力レイヤ |
|
[点群] |
Output point cloud layer with the filtered features of the input point cloud layer.
Currently supported formats are |
Python コード
Algorithm ID: pdal:filter
import processing
processing.run("algorithm_id", {parameter_dictionary})
algorithm id は、プロセシングツールボックス内でアルゴリズムにマウスカーソルを乗せた際に表示されるIDです。 parameter dictionary は、パラメータの「名前」とその値を指定するマッピング型です。Python コンソールからプロセシングアルゴリズムを実行する方法の詳細については、 プロセシングアルゴリズムをコンソールから使う を参照してください。