Importante
La traducción es un esfuerzo comunitario puede unirse. Esta página está actualmente traducida en |progreso de traducción|.
24.1.17. Extracción de nubes de puntos
Atención
Running these algorithms requires QGIS installed with PDAL >= 2.5.0 (see menu).
24.1.17.1. Contorno
Added in 3.32
Exporta un archivo poligonal que contiene el límite de capa de la nube de puntos. Puede contener agujeros y puede ser un polígono de varias partes.
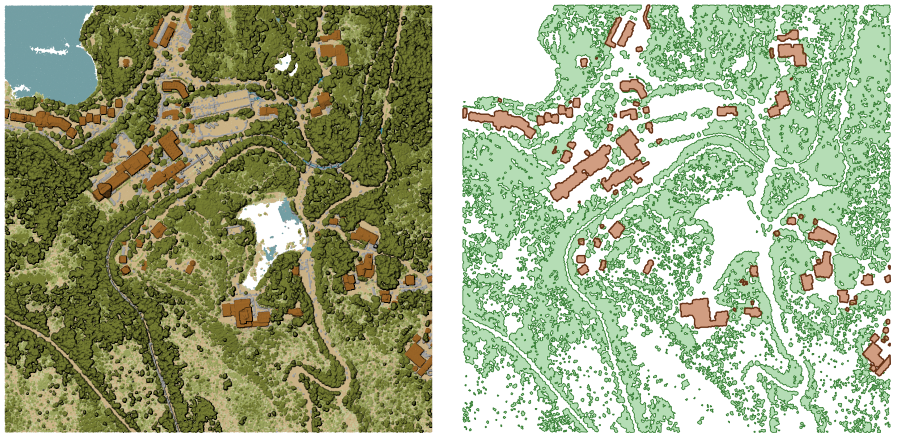
Figura 24.47 Extracción de vegetación alta y polígonos de edificios a partir de una capa de nubes de puntos de entrada
Parametros
Parámetros básicos
Etiqueta |
Nombre |
Tipo |
Descripción |
|---|---|---|---|
Capa de entrada |
|
[nube de puntos] |
Capa de la nube de puntos de entrada para calcular el límite de |
Resolución de las celdas utilizadas para calcular los límites Opcional |
|
[numérico: doble] |
Resolución de las celdas utilizadas para calcular los límites |
Número mínimo de puntos en una celda para considerar que la celda está ocupada Opcional |
|
[numérico: entero] |
Número mínimo de puntos en una celda para considerarla ocupada |
Perímetro |
|
[vectorial: poligonal] Predeterinado: |
Especifique el archivo de nube de puntos que se utilizará como salida. Uno de:
|
Parámetros avanzados
Etiqueta |
Nombre |
Tipo |
Descripción |
|---|---|---|---|
Expresión de filtrado Opcional |
|
[expresión] |
Una expresión PDAL para seleccionar un subconjunto de objetos espaciales en los datos de la nube de puntos |
Extensión del cultivo Opcional |
|
[extensión] |
Una extensión del mapa para seleccionar un subconjunto de objetos espaciales en los datos de la nube de puntos Los métodos disponibles son:
|
Salidas
Etiqueta |
Nombre |
Tipo |
Descripción |
|---|---|---|---|
Perímetro |
|
[vectorial: poligonal] |
Capa vectorial poligonal de salida con el límite de la nube de puntos. El formato actualmente soportado es |
Código Python
ID de algorithm: pdal:boundary
import processing
processing.run("algorithm_id", {parameter_dictionary})
El algoritmo id se muestra cuando pasa el cursor sobre el algoritmo en la caja de herramientas de procesos. El diccionario de parámetros proporciona los NOMBRES y valores de los parámetros. Consulte Utilizar algoritmos de procesamiento desde la consola para obtener detalles sobre cómo ejecutar algoritmos de procesamiento desde la consola de Python.
24.1.17.2. Densidad
Added in 3.32
Exporta un archivo ráster basado en el número de puntos de cada celda ráster: útil para comprobar la calidad de los conjuntos de datos de nubes de puntos.
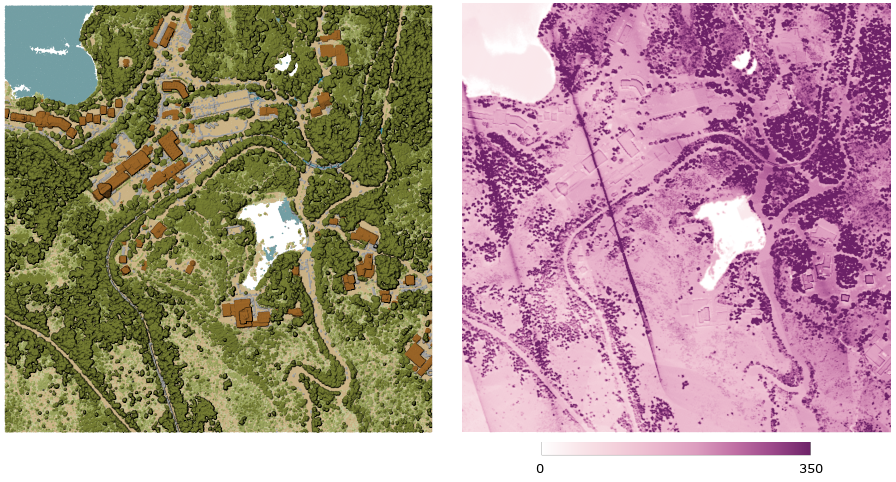
Figura 24.48 Densidad de puntos (número de puntos por 2x2 m) como trama
Parametros
Parámetros básicos
Etiqueta |
Nombre |
Tipo |
Descripción |
|---|---|---|---|
Capa de entrada |
|
[nube de puntos] |
Capa de nube de puntos de entrada para exportar |
Resolución del ráster de densidad |
|
[numérico: doble] Predeterminado: 1.0 |
Tamaño de celda del raster de salida |
Tamaño de las baldosas para recorridos paralelos |
|
[numérico: entero] Preestablecido: 1000 |
Tamaño de los mosaicos en los que se dividirán los datos para las ejecuciones paralelas |
Densidad |
|
[ráster] Predeterinado: |
Especifique el archivo raster al que exportar los datos. Uno de:
|
Parámetros avanzados
Etiqueta |
Nombre |
Tipo |
Descripción |
|---|---|---|---|
Expresión de filtrado Opcional |
|
[expresión] |
Una expresión PDAL para seleccionar un subconjunto de objetos espaciales en los datos de la nube de puntos |
Extensión del cultivo Opcional |
|
[extensión] |
Una extensión del mapa para seleccionar un subconjunto de objetos espaciales en los datos de la nube de puntos Los métodos disponibles son:
|
Origen X de una tesela para ejecuciones paralelas Opcional |
|
[numérico: doble] |
|
Origen Y de una tesela para ejecuciones paralelas Opcional |
|
[numérico: doble] |
Salidas
Etiqueta |
Nombre |
Tipo |
Descripción |
|---|---|---|---|
Densidad |
|
[ráster] |
Capa ráster de salida con el número de puntos dentro de cada celda. El formato actualmente soportado es |
Código Python
Identificación del algoritmo: pdal:density
import processing
processing.run("algorithm_id", {parameter_dictionary})
El algoritmo id se muestra cuando pasa el cursor sobre el algoritmo en la caja de herramientas de procesos. El diccionario de parámetros proporciona los NOMBRES y valores de los parámetros. Consulte Utilizar algoritmos de procesamiento desde la consola para obtener detalles sobre cómo ejecutar algoritmos de procesamiento desde la consola de Python.
24.1.17.3. Filtro
Added in 3.32
Extrae puntos de la nube de puntos de entrada que coinciden con la expresión PDAL y/o están dentro de un rectángulo de recorte.
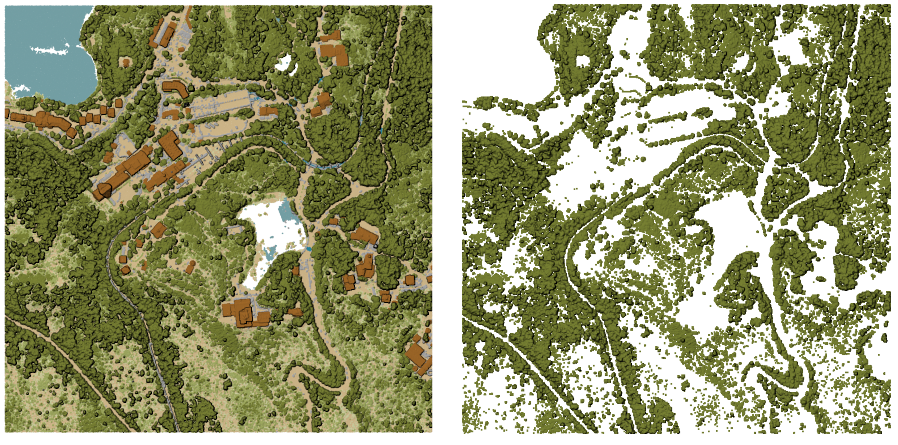
Figura 24.49 Filtrado de la clase de vegetación alta a partir de una capa de nubes de puntos de entrada
Parametros
Etiqueta |
Nombre |
Tipo |
Descripción |
|---|---|---|---|
Capa de entrada |
|
[nube de puntos] |
Capa de nube de puntos de entrada para exportar |
Expresión de filtrado Opcional |
|
[expresión] |
Una expresión PDAL para seleccionar un subconjunto de objetos espaciales en los datos de la nube de puntos |
Extensión del cultivo Opcional |
|
[extensión] |
Una extensión del mapa para seleccionar un subconjunto de objetos espaciales en los datos de la nube de puntos Los métodos disponibles son:
|
Filtrado |
|
[nube de puntos] Predeterinado: |
Especifique el archivo de nube de puntos al que exportar los datos. Uno de:
|
Salidas
Etiqueta |
Nombre |
Tipo |
Descripción |
|---|---|---|---|
Filtrado |
|
[nube de puntos] |
Capa de nube de puntos de salida con los objetos espaciales filtrados de la capa de nube de puntos de entrada. Los formatos actualmente soportados son |
Código Python
Identificación del algoritmo: pdal:filter
import processing
processing.run("algorithm_id", {parameter_dictionary})
El algoritmo id se muestra cuando pasa el cursor sobre el algoritmo en la caja de herramientas de procesos. El diccionario de parámetros proporciona los NOMBRES y valores de los parámetros. Consulte Utilizar algoritmos de procesamiento desde la consola para obtener detalles sobre cómo ejecutar algoritmos de procesamiento desde la consola de Python.