Wichtig
Übersetzen ist eine Gemeinschaftsleistung Sie können mitmachen. Diese Seite ist aktuell zu 95.88% übersetzt.
24.1.15. Punktwolkenkonvertierung
Achtung
Running these algorithms requires QGIS installed with PDAL >= 2.5.0 (see menu).
24.1.15.1. Format konvertieren
Added in 3.32
Konvertiert eine Punktwolke in ein anderes Dateiformat, z.B. erstellt eine komprimierte .LAZ.
Parameter
Bezeichnung |
Name |
Typ |
Beschreibung |
|---|---|---|---|
Eingabelayer |
|
[Punktwolke] |
Punktwolke-Eingabelayer, der konvertiert werden soll |
Konvertiert |
|
[Punktwolke] Standard: |
Specify the point cloud file to use as output. One of:
|
Ausgaben
Bezeichnung |
Name |
Typ |
Beschreibung |
|---|---|---|---|
Konvertiert |
|
[Punktwolke] |
Ausgabe des Punktwolken-Layers in einem modifizierten Dateiformat. Derzeit unterstützte Formate sind |
Python-Code
Algorithmus-Kennung: pdal:convertformat
import processing
processing.run("algorithm_id", {parameter_dictionary})
Die Algorithmus-Kennung wird angezeigt, wenn Sie den Mauszeiger über den Algorithmus in der Verarbeitungs-Werkzeugkiste bewegen. Die Parameter-Liste (parameter_dictionary) enthält die Namen und Werte der Parameter. Siehe Verarbeitungs-Algorithmen von der Konsole aus verwenden für Details zur Ausführung von Verarbeitungsalgorithmen über die Python-Konsole.
24.1.15.2. Raster exportieren
Added in 3.32
Exportiert Punktwolkendaten in ein 2D-Rastergitter mit einer Zellengröße der gegebenen Auflösung und schreibt Werte aus dem angegebenen Attribut.
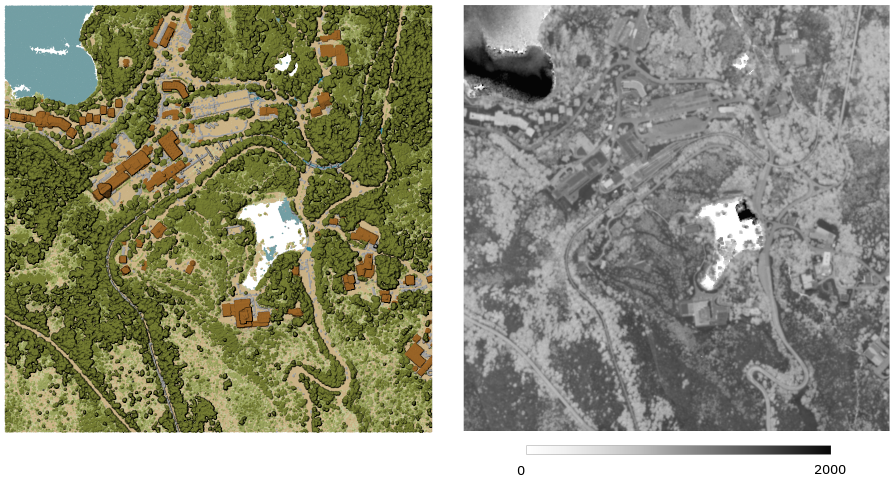
Abb. 24.41 Rasterausgabe unter Verwendung des Attributs „Intensität“ der Punkte
Parameter
Grundlegende Parameter
Bezeichnung |
Name |
Typ |
Beschreibung |
|---|---|---|---|
Eingabelayer |
|
[Punktwolke] |
Layer der zu exportierenden Punktwolke |
Attribut |
|
[Feld] [Aufzählung] |
Ein Feld des Punktwolken-Layers, aus dem die Werte extrahiert werden sollen |
Auflösung des Rasters |
|
[numerisch: Double] Standard: 1,0 |
Zellengröße des Ausgaberasters |
Kachelgröße für parallele Durchläufe |
|
[numerisch: Ganzzahl] Standard: 1000 |
|
Exportiert |
|
[Raster] Standard: |
Specify the raster file to export the data to. One of:
|
Fortgeschrittene Parameter
Bezeichnung |
Name |
Typ |
Beschreibung |
|---|---|---|---|
Filterausdruck Optional |
|
[Ausdruck] |
Ein PDAL-Ausdruck zur Auswahl einer Untergruppe von Objekten in den Punktwolkendaten |
Begrenzungsausmaß Optional |
|
[Ausdehnung] |
Ein Kartenausschnitt zur Auswahl einer Teilmenge von Objekten in den Punktwolkendaten Verfügbare Methoden sind:
|
X-Ursprung einer Kachel für parallele Läufe Optional |
|
[numerisch: Double] |
|
Y-Ursprung einer Kachel für parallele Läufe Optional |
|
[numerisch: Double] |
Ausgaben
Bezeichnung |
Name |
Typ |
Beschreibung |
|---|---|---|---|
Exportiert |
|
[Raster] |
Rasterlayer, in den die Daten der Punktwolke exportiert werden. Das derzeit unterstützte Format ist |
Python-Code
Algorithmus-Kennung: pdal:exportraster
import processing
processing.run("algorithm_id", {parameter_dictionary})
Die Algorithmus-Kennung wird angezeigt, wenn Sie den Mauszeiger über den Algorithmus in der Verarbeitungs-Werkzeugkiste bewegen. Die Parameter-Liste (parameter_dictionary) enthält die Namen und Werte der Parameter. Siehe Verarbeitungs-Algorithmen von der Konsole aus verwenden für Details zur Ausführung von Verarbeitungsalgorithmen über die Python-Konsole.
24.1.15.3. Export to raster (using triangulation)
Added in 3.32
Exportiert Punktwolkendaten in ein 2D-Rastergitter unter Verwendung einer Triangulation von Punkten und anschließender Interpolation von Zellenwerten aus Dreiecken.
Bemerkung
Dieser Algorithmus kann langsamer sein, wenn Sie mit einem großen Datensatz arbeiten. Wenn Ihre Punktwolke sehr dicht ist, können Sie Ihre Bodenpunkte mit dem Algorithmus Raster exportieren als Raster exportieren.
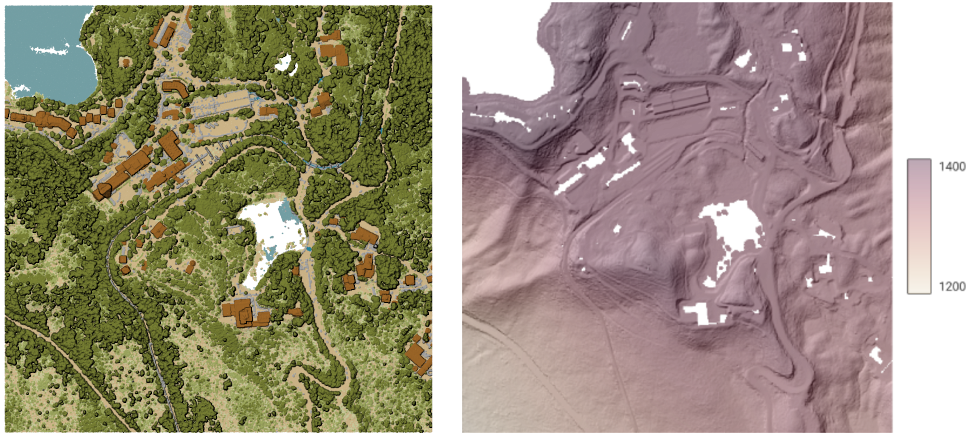
Abb. 24.42 Durch Triangulation von Punktwolken erzeugte Geländerasterausgabe
Parameter
Grundlegende Parameter
Bezeichnung |
Name |
Typ |
Beschreibung |
|---|---|---|---|
Eingabelayer |
|
[Punktwolke] |
Layer der zu exportierenden Punktwolke |
Auflösung des Rasters |
|
[numerisch: Double] Standard: 1,0 |
Zellengröße des Ausgaberasters |
Kachelgröße für parallele Durchläufe |
|
[numerisch: Ganzzahl] Standard: 1000 |
|
Exportiert |
|
[Raster] Standard: |
Specify the raster file to export the data to. One of:
|
Fortgeschrittene Parameter
Bezeichnung |
Name |
Typ |
Beschreibung |
|---|---|---|---|
Filterausdruck Optional |
|
[Ausdruck] |
Ein PDAL-Ausdruck zur Auswahl einer Untergruppe von Objekten in den Punktwolkendaten |
Begrenzungsausmaß Optional |
|
[Ausdehnung] |
Ein Kartenausschnitt zur Auswahl einer Teilmenge von Objekten in den Punktwolkendaten Verfügbare Methoden sind:
|
X-Ursprung einer Kachel für parallele Läufe Optional |
|
[numerisch: Double] |
|
Y-Ursprung einer Kachel für parallele Läufe Optional |
|
[numerisch: Double] |
Ausgaben
Bezeichnung |
Name |
Typ |
Beschreibung |
|---|---|---|---|
Exportiert (mit Triangulation) |
|
[Raster] |
Rasterlayer, in den die Daten der Punktwolke exportiert werden. Das derzeit unterstützte Format ist |
Python-Code
Algorithmus-Kennung: pdal:exportrastertin
import processing
processing.run("algorithm_id", {parameter_dictionary})
Die Algorithmus-Kennung wird angezeigt, wenn Sie den Mauszeiger über den Algorithmus in der Verarbeitungs-Werkzeugkiste bewegen. Die Parameter-Liste (parameter_dictionary) enthält die Namen und Werte der Parameter. Siehe Verarbeitungs-Algorithmen von der Konsole aus verwenden für Details zur Ausführung von Verarbeitungsalgorithmen über die Python-Konsole.
24.1.15.4. Als Vektor exportieren
Added in 3.32
Exportiert Punktwolkendaten in einen Vektorlayer mit 3D Punkten (ein GeoPackage), optional mit zusätzlichen Attributen.
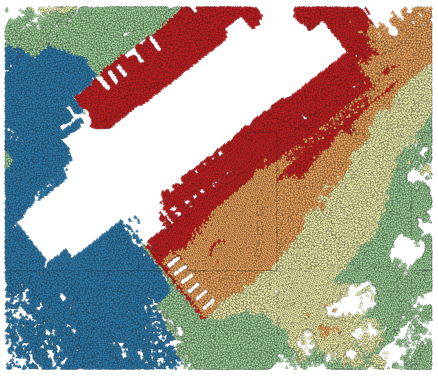
Abb. 24.43 Exportieren der Punktwolke (Bodenpunkte) in einen Vektorlayer, der auf der Grundlage der Erhöhung erstellt wurde
Parameter
Grundlegende Parameter
Bezeichnung |
Name |
Typ |
Beschreibung |
|---|---|---|---|
Eingabelayer |
|
[Punktwolke] |
Layer der zu exportierenden Punktwolke |
Attribut Optional |
|
[Feld] [Liste] |
Ein oder mehrere Felder des Layers der Punktwolke, der mit den Punkten exportiert werden soll. |
Exportiert |
|
[Vektor] Standard: |
Specify the vector file to export the data to. One of:
|
Fortgeschrittene Parameter
Bezeichnung |
Name |
Typ |
Beschreibung |
|---|---|---|---|
Filterausdruck Optional |
|
[Ausdruck] |
Ein PDAL-Ausdruck zur Auswahl einer Untergruppe von Objekten in den Punktwolkendaten |
Begrenzungsausmaß Optional |
|
[Ausdehnung] |
Ein Kartenausschnitt zur Auswahl einer Teilmenge von Objekten in den Punktwolkendaten Verfügbare Methoden sind:
|
Ausgaben
Bezeichnung |
Name |
Typ |
Beschreibung |
|---|---|---|---|
Exportiert |
|
[Vektor] |
Vektorlayer, in den die Daten der Punktwolke exportiert werden. Das derzeit unterstützte Format ist |
Python-Code
Algorithmus-Kennung: pdal:exportvector
import processing
processing.run("algorithm_id", {parameter_dictionary})
Die Algorithmus-Kennung wird angezeigt, wenn Sie den Mauszeiger über den Algorithmus in der Verarbeitungs-Werkzeugkiste bewegen. Die Parameter-Liste (parameter_dictionary) enthält die Namen und Werte der Parameter. Siehe Verarbeitungs-Algorithmen von der Konsole aus verwenden für Details zur Ausführung von Verarbeitungsalgorithmen über die Python-Konsole.