Fontos
A fordítás közösségi munka eredménye, amelyhez itt tudsz csatlakozni <https://qgis.org/en/site/getinvolved/translate.html#becoming-a-translator>`_. Ennek az oldalnak eddig a 50.63% részét fordítottuk le.
28.1.12. Point Cloud Conversion
NEW in 3.32
28.1.12.1. Convert format
Converts a point cloud to a different file format, e.g. creates a compressed .LAZ.
Paraméterek
Címke |
Név |
Típus |
Leírás |
|---|---|---|---|
Input réteg |
|
[point cloud] |
Input point cloud layer to convert |
Converted |
|
[point cloud] Alapértelmezett: |
Specify the point cloud file to use as output. One of:
|
Eredmények
Címke |
Név |
Típus |
Leírás |
|---|---|---|---|
Converted |
|
[point cloud] |
Output point cloud layer in a modified file format.
Currently supported formats are |
Python kód
Algorithm ID: pdal:convertformat
import processing
processing.run("algorithm_id", {parameter_dictionary})
Az algoritmus azonosító akkor jelenik meg, ha az egérmutatót az algoritmus fölé viszi a Feldolgozás eszköztáron. A paraméterszótár tartalmazza a paraméter NAME-eket és érékeket. A feldolgozási algoritmusok Python konzolról történő futtatásával kapcsolatos részletekért lásd a Using processing algorithms from the console fejezetet.
28.1.12.2. Export to raster
Exports point cloud data to a 2D raster grid having cell size of given resolution, writing values from the specified attribute.
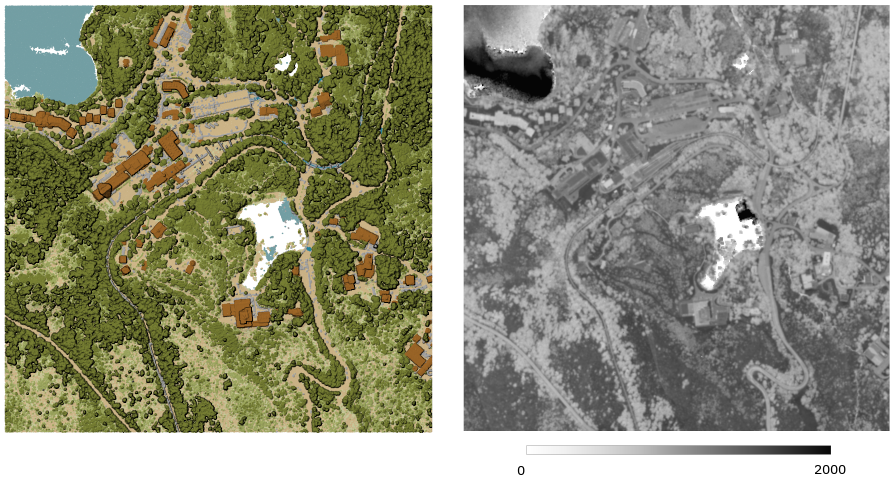
28.10. ábra Raster output using Intensity attribute of points
Paraméterek
Alapvető paraméterek
Címke |
Név |
Típus |
Leírás |
|---|---|---|---|
Input réteg |
|
[point cloud] |
Input point cloud layer to export |
Attribute |
|
[field] [enumeration] |
A Field of the point cloud layer to extract the values from |
Resolution of the density raster |
|
[szám] Default: 1.0 |
Cell size of the output raster |
Tile size for parallel runs |
|
[szám] Default: 1000 |
|
Exported |
|
[raster] Alapértelmezett: |
Specify the raster file to export the data to. One of:
|
Speciális paraméterek
Címke |
Név |
Típus |
Leírás |
|---|---|---|---|
Filter expression Optional |
|
[expression] |
A PDAL expression for selecting a subset of features in the point cloud data |
Cropping extent Optional |
|
[terjedelem] |
A map extent for selecting a subset of features in the point cloud data Available methods are:
|
X origin of a tile for parallel runs Optional |
|
[szám] |
|
Y origin of a tile for parallel runs Optional |
|
[szám] |
Eredmények
Címke |
Név |
Típus |
Leírás |
|---|---|---|---|
Exported |
|
[raster] |
Output raster layer features of the point cloud layer are exported to.
Currently supported format is |
Python kód
Algorithm ID: pdal:exportraster
import processing
processing.run("algorithm_id", {parameter_dictionary})
Az algoritmus azonosító akkor jelenik meg, ha az egérmutatót az algoritmus fölé viszi a Feldolgozás eszköztáron. A paraméterszótár tartalmazza a paraméter NAME-eket és érékeket. A feldolgozási algoritmusok Python konzolról történő futtatásával kapcsolatos részletekért lásd a Using processing algorithms from the console fejezetet.
28.1.12.3. Export raster (using triangulation)
Exports point cloud data to a 2D raster grid using a triangulation of points and then interpolating cell values from triangles.
Megjegyzés
Using this algorithm can be slower if you are dealing with a large dataset. If your point cloud is dense, you can export your ground points as a raster using the Export to raster algorithm.
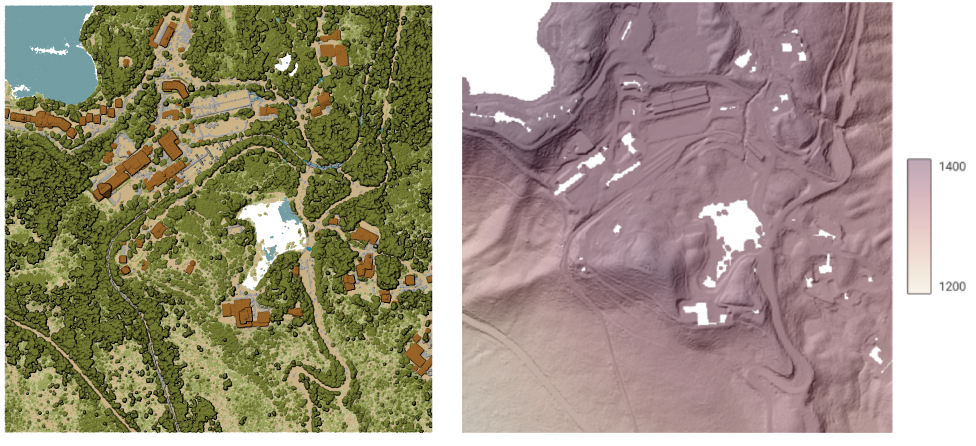
28.11. ábra Terrain raster output generated by point cloud triangulation
Paraméterek
Alapvető paraméterek
Címke |
Név |
Típus |
Leírás |
|---|---|---|---|
Input réteg |
|
[point cloud] |
Input point cloud layer to export |
Resolution of the density raster |
|
[szám] Default: 1.0 |
Cell size of the output raster |
Tile size for parallel runs |
|
[szám] Default: 1000 |
|
Exported |
|
[raster] Alapértelmezett: |
Specify the raster file to export the data to. One of:
|
Speciális paraméterek
Címke |
Név |
Típus |
Leírás |
|---|---|---|---|
Filter expression Optional |
|
[expression] |
A PDAL expression for selecting a subset of features in the point cloud data |
Cropping extent Optional |
|
[terjedelem] |
A map extent for selecting a subset of features in the point cloud data Available methods are:
|
X origin of a tile for parallel runs Optional |
|
[szám] |
|
Y origin of a tile for parallel runs Optional |
|
[szám] |
Eredmények
Címke |
Név |
Típus |
Leírás |
|---|---|---|---|
Exported (using triangulation) |
|
[raster] |
Output raster layer features of the point cloud layer are exported to.
Currently supported format is |
Python kód
Algorithm ID: pdal:exportrastertin
import processing
processing.run("algorithm_id", {parameter_dictionary})
Az algoritmus azonosító akkor jelenik meg, ha az egérmutatót az algoritmus fölé viszi a Feldolgozás eszköztáron. A paraméterszótár tartalmazza a paraméter NAME-eket és érékeket. A feldolgozási algoritmusok Python konzolról történő futtatásával kapcsolatos részletekért lásd a Using processing algorithms from the console fejezetet.
28.1.12.4. Export to vector
Exports point cloud data to a vector layer with 3D points (a GeoPackage), optionally with extra attributes.
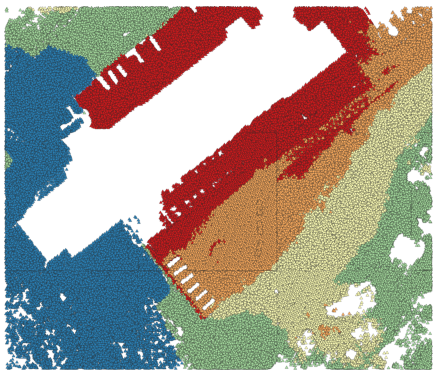
28.12. ábra Exporting point cloud (ground points) to a vector layer styled based on the elevation
Paraméterek
Alapvető paraméterek
Címke |
Név |
Típus |
Leírás |
|---|---|---|---|
Input réteg |
|
[point cloud] |
Input point cloud layer to export |
Attribute Optional |
|
[field] [list] |
One or more fields of the point cloud layer to export with the points. |
Exported |
|
[vector] Alapértelmezett: |
Specify the vector file to export the data to. One of:
|
Speciális paraméterek
Címke |
Név |
Típus |
Leírás |
|---|---|---|---|
Filter expression Optional |
|
[expression] |
A PDAL expression for selecting a subset of features in the point cloud data |
Cropping extent Optional |
|
[terjedelem] |
A map extent for selecting a subset of features in the point cloud data Available methods are:
|
Eredmények
Címke |
Név |
Típus |
Leírás |
|---|---|---|---|
Exported |
|
[vector] |
Output vector layer features of the point cloud layer are exported to.
Currently supported format is |
Python kód
Algorithm ID: pdal:exportvector
import processing
processing.run("algorithm_id", {parameter_dictionary})
Az algoritmus azonosító akkor jelenik meg, ha az egérmutatót az algoritmus fölé viszi a Feldolgozás eszköztáron. A paraméterszótár tartalmazza a paraméter NAME-eket és érékeket. A feldolgozási algoritmusok Python konzolról történő futtatásával kapcsolatos részletekért lásd a Using processing algorithms from the console fejezetet.