Belangrijk
Vertalen is een inspanning van de gemeenschap waaraan u deel kunt nemen. Deze pagina is momenteel voor 100.00% vertaald.
28.1.14. Uitnemen uit puntenwolken
NEW in 3.32
28.1.14.1. Grens
Exporteert een bestand met polygonen die de grenzen voor een laag puntenwolk bevat. Het mag gaten bevatten en het mag een meerdelige polygoon zijn.
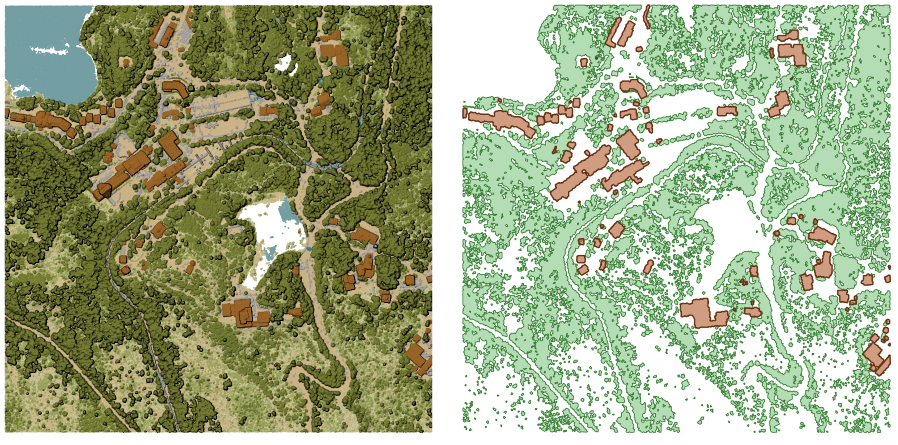
Fig. 28.16 Uitnemen van hoge vegetatie en polygonen voor gebouwen uit een invoerlaag met puntenwolk
Parameters
Basis parameters
Label |
Naam |
Type |
Beschrijving |
|---|---|---|---|
Invoerlaag |
|
[point cloud] |
Invoerlaag puntenwolk waarvoor de grenzen moeten worden berekend |
Resolutie van gebruikte cellen voor het berekenen van de grenzen Optioneel |
|
[getal] |
Resolutie van gebruikte cellen voor het berekenen van de grenzen |
Minimale aantal punten in een cel voor overweging of cel gevuld is Optioneel |
|
[getal] |
Minimale aantal punten in een cel voor overweging of cel gevuld is |
Grens |
|
[vector: polygoon] Standaard: |
Specificeer het bestand voor puntenwolk voor de uitvoer. Één van:
|
Gevorderde parameters
Label |
Naam |
Type |
Beschrijving |
|---|---|---|---|
Filter-expressie Optioneel |
|
[expressie] |
Een PDAL-expressie voor het selecteren van een subset met objecten uit de gegevens van de puntenwolk |
Bereik bijsnijden Optioneel |
|
[bereik] |
Een kaartbereik voor het selecteren van een subset met objecten uit de gegevens van de puntenwolk Beschikbare methoden zijn:
|
Uitvoer
Label |
Naam |
Type |
Beschrijving |
|---|---|---|---|
Grens |
|
[vector: polygoon] |
Uitvoer polygoon vectorlaag met de grenzen van de puntenwolk. Momenteel ondersteunde indeling is |
Pythoncode
ID algoritme: pdal:boundary
import processing
processing.run("algorithm_id", {parameter_dictionary})
Het ID voor het algoritme wordt weergegeven als u over het algoritme gaat met de muisaanwijzer in de Toolbox van Processing. Het woordenboek voor de parameters verschaft de NAME’s en waarden van de parameters. Bekijk Processing algoritmes gebruiken vanaf de console voor details over hoe algoritmes van Processing uit te voeren vanuit de console voor Python.
28.1.14.2. Dichtheid
Exporteert een rasterbestand, gebaseerd op het aantal punten binnen elke cel van het raster - nuttig voort het controleren van de kwaliteit van gegevenssets van puntenwolken.
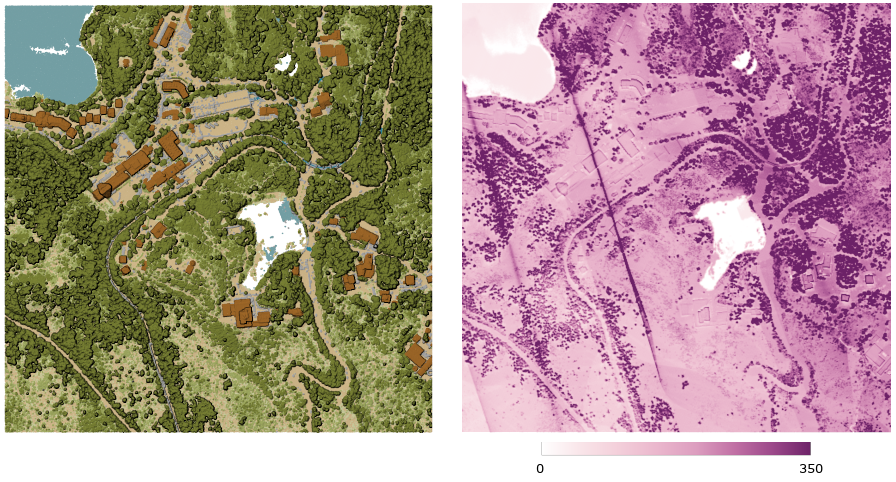
Fig. 28.17 Dichtheid punten (aantal punten per 2x2 m) als een raster
Parameters
Basis parameters
Label |
Naam |
Type |
Beschrijving |
|---|---|---|---|
Invoerlaag |
|
[point cloud] |
Invoerlaag puntenwolk om te exporteren |
Resolutie voor het raster voor de dichtheid |
|
[getal] Standaard: 1.0 |
Celgrootte van het uitvoer raster |
Tegelgrootte voor parallelle uitvoeringen |
|
[getal] Standaard: 1000 |
Grootte van de tegels waarin de gegevens moeten worden gesplitst bij parallelle uitvoeringen |
Dichtheid |
|
[raster] Standaard: |
Specificeer het bestand waarnaar de gegevens moeten worden geëxporteerd. Één van:
|
Gevorderde parameters
Label |
Naam |
Type |
Beschrijving |
|---|---|---|---|
Filter-expressie Optioneel |
|
[expressie] |
Een PDAL-expressie voor het selecteren van een subset met objecten uit de gegevens van de puntenwolk |
Bereik bijsnijden Optioneel |
|
[bereik] |
Een kaartbereik voor het selecteren van een subset met objecten uit de gegevens van de puntenwolk Beschikbare methoden zijn:
|
X-origine van een tegel voor parallelle uitvoeringen Optioneel |
|
[getal] |
|
Y-origine van een tegel voor parallelle uitvoeringen Optioneel |
|
[getal] |
Uitvoer
Label |
Naam |
Type |
Beschrijving |
|---|---|---|---|
Dichtheid |
|
[raster] |
Uitvoer rasterlaag met aantal punten in elke cel. Momenteel ondersteunde indeling is |
Pythoncode
ID algoritme: pdal:density
import processing
processing.run("algorithm_id", {parameter_dictionary})
Het ID voor het algoritme wordt weergegeven als u over het algoritme gaat met de muisaanwijzer in de Toolbox van Processing. Het woordenboek voor de parameters verschaft de NAME’s en waarden van de parameters. Bekijk Processing algoritmes gebruiken vanaf de console voor details over hoe algoritmes van Processing uit te voeren vanuit de console voor Python.
28.1.14.3. Filteren
Neemt punten uit de invoer puntenwolk die voldoen aan de expressie van PDAL en/of die binnen een bijgesneden rechthoek liggen.
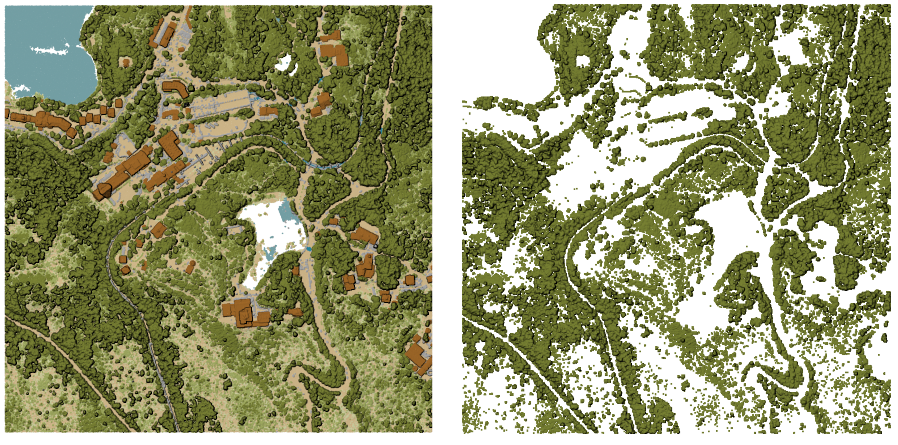
Fig. 28.18 Filteren van een klasse voor hoge vegetatie uit een invoerlaag puntenwolk
Parameters
Label |
Naam |
Type |
Beschrijving |
|---|---|---|---|
Invoerlaag |
|
[point cloud] |
Invoerlaag puntenwolk om te exporteren |
Filter-expressie Optioneel |
|
[expressie] |
Een PDAL-expressie voor het selecteren van een subset met objecten uit de gegevens van de puntenwolk |
Bereik bijsnijden Optioneel |
|
[bereik] |
Een kaartbereik voor het selecteren van een subset met objecten uit de gegevens van de puntenwolk Beschikbare methoden zijn:
|
Gefilterd |
|
[point cloud] Standaard: |
Specificeer het bestand puntenwolk waarnaar de gegevens moeten worden geëxporteerd. Één van:
|
Uitvoer
Label |
Naam |
Type |
Beschrijving |
|---|---|---|---|
Gefilterd |
|
[point cloud] |
Uitvoerlaag puntenwolk met de gefilterde objecten van de invoerlaag puntenwolk. Momenteel ondersteunde indelingen zijn |
Pythoncode
ID algoritme: pdal:filter
import processing
processing.run("algorithm_id", {parameter_dictionary})
Het ID voor het algoritme wordt weergegeven als u over het algoritme gaat met de muisaanwijzer in de Toolbox van Processing. Het woordenboek voor de parameters verschaft de NAME’s en waarden van de parameters. Bekijk Processing algoritmes gebruiken vanaf de console voor details over hoe algoritmes van Processing uit te voeren vanuit de console voor Python.