중요
번역은 여러분이 참여할 수 있는 커뮤니티 활동입니다. 이 페이지는 현재 85.68% 번역되었습니다.
24.1.20. 래스터 지형 분석
24.1.20.1. 향
입력 수치 지형 모델(DTM; Digital Terrain Model)의 향(aspect)을 계산합니다. 산출되는 향 래스터 레이어는 경사 방향을 표현하는 0에서 360까지의 값을 담고 있습니다. 이 값은 북(0°)에서 시작해 시계방향으로 늘어납니다.
그림 24.71 향 값
다음 그림은 색상표로 재범주화된 향 레이어입니다:
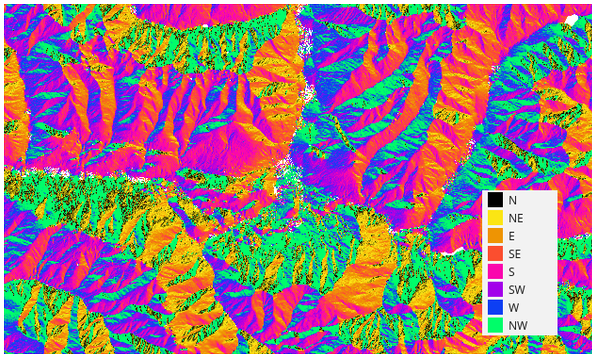
그림 24.72 재범주화된 향 레이어
파라미터
라벨 |
이름 |
유형 |
설명 |
|---|---|---|---|
Elevation layer |
|
[raster] |
DTM 래스터 레이어 |
Z factor |
|
[numeric: double] 기본값: 1.0 |
수직 과장(exaggeration). 이 파라미터는 Z 단위가 X 및 Y 단위와, 예를 들어 피트와 미터처럼 다를 때 유용합니다. 이 파라미터를 사용해서 차이를 조정할 수 있습니다. 기본값은 1(과장 없음)입니다. |
Aspect |
|
[raster] 기본값: |
Specify the output aspect raster layer. One of:
|
산출물
라벨 |
이름 |
유형 |
설명 |
|---|---|---|---|
Aspect |
|
[raster] |
산출 향 래스터 레이어 |
파이썬 코드
Algorithm ID: native:aspect
import processing
processing.run("algorithm_id", {parameter_dictionary})
공간 처리 툴박스에 있는 알고리즘 위에 마우스를 가져가면 알고리즘 ID 를 표시합니다. 파라미터 목록(dictionary) 은 파라미터 이름 및 값을 제공합니다. 파이썬 콘솔에서 공간 처리 알고리즘을 어떻게 실행하는지 자세히 알고 싶다면 콘솔에서 공간 처리 알고리즘 사용 을 참조하세요.
24.1.20.2. DTM 필터 (경사 기반)
Added in 3.34
DEM의 셀들을 지표 셀과 (지표가 아닌) 객체 셀로 분류하기 위해 DEM을 필터링하는 데 사용할 수 있습니다.
이 도구는 포셀만(G. Vosselman, 2000)이 설명한 개념을 사용해서, 가까이 있는 2개의 셀 사이의 높이 차이가 큰 경우 이는 지형의 급경사 때문이 아닐 가능성이 크다는 가정에 바탕을 두고 있습니다. 더 높은 셀이 지표가 아닐 수도 있는 확률은 두 셀 사이의 거리가 줄어들수록 증가합니다. 따라서 이 필터는 두 셀 사이의 최대 높이 차이(dz_max)를 셀들 사이의 거리(d)의 함수(dz_max( d ) = d)로 정의합니다. 어떤 셀의 커널 반경 안에, 두 셀 사이의 거리에서 허용된 최대 높이 차이를 초과하는 셀이 하나도 없는 경우 해당 셀을 지형으로 분류합니다.
지형 경사 근사치(s) 파라미터를 사용해서 연구 지역의 전체적인 경사와 일치하도록 필터 함수를 수정(dz_max( d ) = d * s)합니다. 5% 신뢰 구간(ci = 1.65 * sqrt( 2 * stddev ))을 이용해서 필터 기준을 완화(dz_max( d ) = d * s + ci)시키거나 증폭(dz_max( d ) = d * s - ci) 시켜 이 필터 함수를 더욱 수정할 수도 있습니다.
참고 문헌: Vosselman, G. (2000): Slope based filtering of laser altimetry data. IAPRS, Vol. XXXIII, Part B3, Amsterdam, The Netherlands, 935-942
더 보기
This tool is a port of the SAGA DTM Filter (slope-based)
파라미터
기본 파라미터
라벨 |
이름 |
유형 |
설명 |
|---|---|---|---|
Input layer |
|
[raster] |
DTM 래스터 레이어 |
Band number |
|
[raster band] |
연산에 넣을 DEM의 밴드 |
Kernel radius (pixels) |
|
[numeric: integer] 기본값: 5 |
필터 커널의 (픽셀 단위) 반경입니다. 지표가 아닌 객체 옆에 있는 지표 셀까지 도달할 정도로 충분히 큰 값이어야만 합니다. |
Terrain slope (%, pixel size/vertical units) |
|
[numeric: double] Default: 30.0 |
|
Filter modification |
|
[list] 기본값: 0 |
필터 커널을 수정하지 않고 적용시킬지, 또는 신뢰 구간을 이용해서 높이 기준을 완화 또는 증폭시킬지 여부를 선택합니다.
|
Standard deviation |
|
[numeric: double] 기본값: 0.1 |
높이 한계값에 적용되는 5% 신뢰 구간을 계산하는 데 쓰이는 표준 편차입니다. |
Output layer (ground) 선택적 |
|
[raster] 기본값: |
Specify the filtered DEM containing only cells classified as ground. One of:
|
Output layer (non-ground objects) 선택적 |
|
[raster] 기본값: |
Specify the non-ground objects removed by the filter. One of:
|
고급 파라미터
라벨 |
이름 |
유형 |
설명 |
|---|---|---|---|
Creation options 선택적
|
|
[string] 기본값: ‘’ |
래스터를 생성하기 위한 (색상, 블록 크기, 파일 압축 등등) 하나 이상의 생성 옵션을 추가하기 위한 파라미터입니다. 사용자 편의를 위해, 사전 정의 프로파일을 사용할 수 있습니다. (GDAL 드라이버 옵션 참조) 배치(batch) 프로세스 및 모델 설계자의 경우: 파이프 문자( |
산출물
라벨 |
이름 |
유형 |
설명 |
|---|---|---|---|
Output layer (ground) |
|
[raster] |
지표로 분류된 셀들만 담고 있는 필터링된 DEM입니다. |
Output layer (non-ground objects) |
|
[raster] |
필터가 제거한 지표가 아닌 객체들입니다. |
파이썬 코드
알고리즘 ID: native:dtmslopebasedfilter
import processing
processing.run("algorithm_id", {parameter_dictionary})
공간 처리 툴박스에 있는 알고리즘 위에 마우스를 가져가면 알고리즘 ID 를 표시합니다. 파라미터 목록(dictionary) 은 파라미터 이름 및 값을 제공합니다. 파이썬 콘솔에서 공간 처리 알고리즘을 어떻게 실행하는지 자세히 알고 싶다면 콘솔에서 공간 처리 알고리즘 사용 을 참조하세요.
24.1.20.3. Fill sinks (Wang & Liu)
Added in 3.44
Uses a method proposed by Wang & Liu to identify and fill surface depressions in digital elevation models.
The method was enhanced to allow the creation of hydrologically sound elevation models, i.e. not only to fill the depression(s) but also to preserve a downward slope along the flow path. If desired, this is accomplished by preserving a minimum slope gradient (and thus elevation difference) between cells.
References: Wang, L. & H. Liu (2006): An efficient method for identifying and filling surface depressions in digital elevation models for hydrologic analysis and modelling. International Journal of Geographical Information Science, Vol. 20, No. 2: 193-213.
더 보기
This tool is a port of the SAGA Fill Sinks (Wang & Liu) tool.
파라미터
기본 파라미터
라벨 |
이름 |
유형 |
설명 |
|---|---|---|---|
Input layer |
|
[raster] |
DTM 래스터 레이어 |
Band number |
|
[raster band] 기본값: 1 |
연산에 넣을 DEM의 밴드 |
Minimum slope (degrees) |
|
[numeric: double] Default: 0.10 |
Minimum slope gradient to preserve from cell to cell; with a value of zero, sinks are filled up to the spill elevation (which results in flat areas). |
Output layer (filled DEM) 선택적 |
|
[raster] 기본값: |
Specify the output raster corresponding to the depression-free DEM. One of:
|
Output layer (flow directions) 선택적 |
|
[raster] 기본값: |
Specify the output raster with computed flow directions. One of:
|
Output layer (watershed basins) 선택적 |
|
[raster] 기본값: |
Specify the output raster corresponding to the delineated watershed basins. One of:
|
고급 파라미터
라벨 |
이름 |
유형 |
설명 |
|---|---|---|---|
Creation options 선택적 |
|
[string] 기본값: ‘’ |
래스터를 생성하기 위한 (색상, 블록 크기, 파일 압축 등등) 하나 이상의 생성 옵션을 추가하기 위한 파라미터입니다. 사용자 편의를 위해, 사전 정의 프로파일을 사용할 수 있습니다. (GDAL 드라이버 옵션 참조) 배치(batch) 프로세스 및 모델 설계자의 경우: 파이프 문자( |
산출물
라벨 |
이름 |
유형 |
설명 |
|---|---|---|---|
Output layer (filled DEM) |
|
[raster] |
Output raster corresponding to the depression-free digital elevation model. |
Output layer (flow directions) |
|
[raster] |
Output raster with computed flow directions; 0=N, 1=NE, 2=E, … 7=NW. |
Output layer (watershed basins) |
|
[raster] |
Output raster corresponding to the delineated watershed basins. |
파이썬 코드
Algorithm ID: native:fillsinkswangliu
import processing
processing.run("algorithm_id", {parameter_dictionary})
공간 처리 툴박스에 있는 알고리즘 위에 마우스를 가져가면 알고리즘 ID 를 표시합니다. 파라미터 목록(dictionary) 은 파라미터 이름 및 값을 제공합니다. 파이썬 콘솔에서 공간 처리 알고리즘을 어떻게 실행하는지 자세히 알고 싶다면 콘솔에서 공간 처리 알고리즘 사용 을 참조하세요.
24.1.20.4. 음영기복
입력 DTM으로부터 음영기복(hillshade) 래스터 레이어를 계산합니다.
태양의 위치에 따라 레이어의 음영을 계산합니다. 태양의 수평 각도(방위각, azimuth)와 수직 각도(태양 고도) 둘 다 변경할 수 있는 옵션이 있습니다.
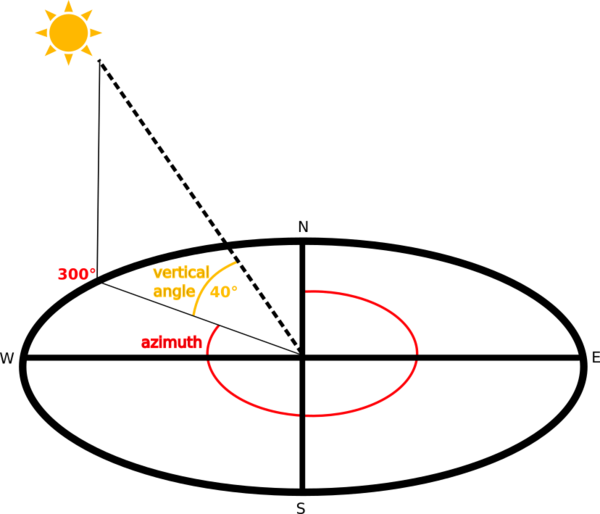
그림 24.73 방위각 및 수직 각도
음영기복 레이어는 0(완전한 그림자)에서 255(완전한 태양)까지의 값을 담고 있습니다. 음영기복은 보통 해당 지역의 기복(relief)을 더 잘 이해하기 위해 사용됩니다.
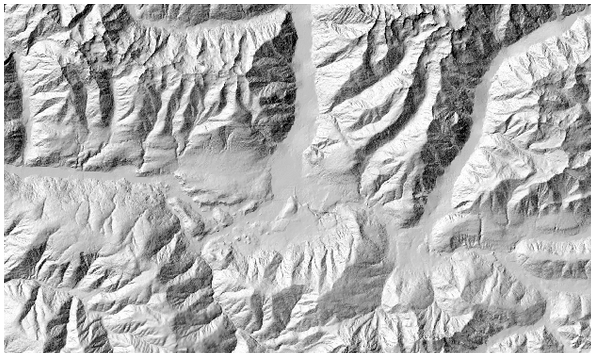
그림 24.74 방위각이 300이고 수직 각도가 45인 음영기복 레이어
음영기복 레이어에 투명도를 적용한 다음 표고 래스터와 중첩시키면 아주 흥미로운 맵을 볼 수 있습니다:
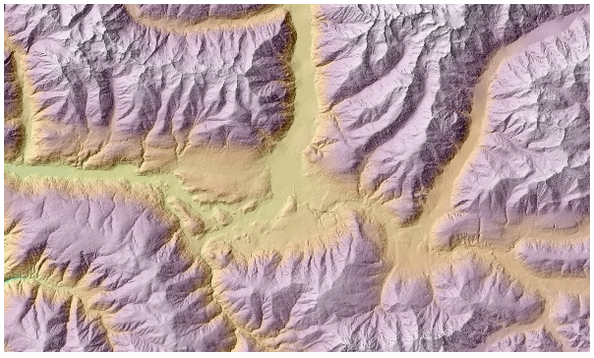
그림 24.75 음영기복과 표고 레이어의 중첩
파라미터
라벨 |
이름 |
유형 |
설명 |
|---|---|---|---|
Elevation layer |
|
[raster] |
DTM 래스터 레이어 |
Z factor |
|
[numeric: double] 기본값: 1.0 |
수직 과장(exaggeration). 이 파라미터는 Z 단위가 X 및 Y 단위와, 예를 들어 피트와 미터처럼 다를 때 유용합니다. 이 파라미터를 사용해서 차이를 조정할 수 있습니다. 이 파라미터의 값을 증가시키면 마지막 결과물을 과장할 것입니다. (경사가 더 심하게 보이게 만듭니다.) 기본값은 1(과장 없음)입니다. |
Azimuth (horizontal angle) |
|
[numeric: double] 기본값: 300.0 |
태양의 수평 각도를 (도 단위 시계 방향으로) 설정합니다. 0에서 360까지의 범위로, 0이 북쪽입니다. |
Vertical angle |
|
[numeric: double] 기본값: 40.0 |
태양의 수직 각도를 (도 단위로) 설정합니다. 태양의 고도를 말합니다. 0(최소 고도)에서 90(최고 고도) 사이에서 값을 설정할 수 있습니다. |
Hillshade |
|
[raster] 기본값: |
Specify the output hillshade raster layer. One of:
|
산출물
라벨 |
이름 |
유형 |
설명 |
|---|---|---|---|
Hillshade |
|
[raster] |
산출 음영기복 래스터 레이어 |
파이썬 코드
Algorithm ID: native:hillshade
import processing
processing.run("algorithm_id", {parameter_dictionary})
공간 처리 툴박스에 있는 알고리즘 위에 마우스를 가져가면 알고리즘 ID 를 표시합니다. 파라미터 목록(dictionary) 은 파라미터 이름 및 값을 제공합니다. 파이썬 콘솔에서 공간 처리 알고리즘을 어떻게 실행하는지 자세히 알고 싶다면 콘솔에서 공간 처리 알고리즘 사용 을 참조하세요.
24.1.20.5. 고도분포곡선
입력 DEM으로부터 고도분포곡선(hypsometric curve)을 계산합니다. 사용자가 지정한 산출 폴더에 계산한 곡선을 CSV 파일로 생성합니다.
고도분포곡선이란 지리적 영역의 표고값의 누적 히스토그램을 말합니다.
고도분폭고선을 지역의 지형학에 의한 풍경의 변화를 감지하는 데 사용할 수 있습니다.
파라미터
라벨 |
이름 |
유형 |
설명 |
|---|---|---|---|
DEM to analyze |
|
[raster] |
고도를 계산하는 데 사용하기 위한 DEM 래스터 레이어 |
Boundary layer |
|
[vector: polygon] |
고도분포곡선을 계산하는 데 사용되는 영역의 경계를 담은 폴리곤 벡터 레이어 |
Step |
|
[numeric: double] 기본값: 100.0 |
곡선들 사이의 수직 거리 |
Use % of area instead of absolute value |
|
[boolean] 기본값: False |
CSV 파일의 |
Hypsometric curves |
|
[folder] |
Specify the output folder for the hypsometric curves. One of:
|
산출물
라벨 |
이름 |
유형 |
설명 |
|---|---|---|---|
Hypsometric curves |
|
[folder] |
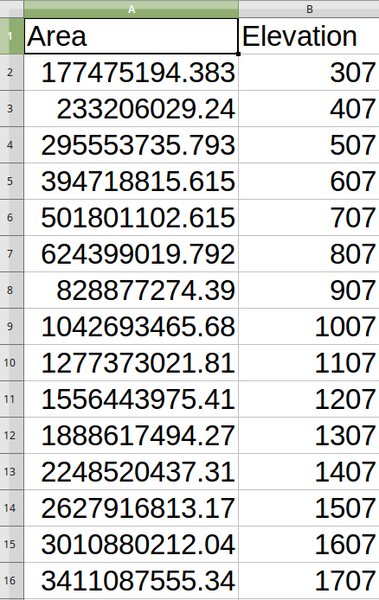
고도분포곡선을 담은 파일을 담고 있는 디렉터리입니다. 입력 벡터 레이어의 각 피처별로, 면적 및 고도 값을 가진 CSV 파일을 생성할 것입니다. 파일명은 |
파이썬 코드
알고리즘 ID: qgis:hypsometriccurves
import processing
processing.run("algorithm_id", {parameter_dictionary})
공간 처리 툴박스에 있는 알고리즘 위에 마우스를 가져가면 알고리즘 ID 를 표시합니다. 파라미터 목록(dictionary) 은 파라미터 이름 및 값을 제공합니다. 파이썬 콘솔에서 공간 처리 알고리즘을 어떻게 실행하는지 자세히 알고 싶다면 콘솔에서 공간 처리 알고리즘 사용 을 참조하세요.
24.1.20.6. 기복
수치 표고 데이터로부터 음영 기복(relief) 레이어를 생성합니다. 기복 색상을 직접 지정할 수도 있고, 알고리즘이 모든 기복 색상 범주를 자동으로 선택하도록 할 수도 있습니다.

그림 24.76 기복 레이어
파라미터
라벨 |
이름 |
유형 |
설명 |
|---|---|---|---|
Elevation layer |
|
[raster] |
DTM 래스터 레이어 |
Z factor |
|
[numeric: double] 기본값: 1.0 |
수직 과장(exaggeration). 이 파라미터는 Z 단위가 X 및 Y 단위와, 예를 들어 피트와 미터처럼 다를 때 유용합니다. 이 파라미터를 사용해서 차이를 조정할 수 있습니다. 이 파라미터의 값을 증가시키면 마지막 결과물을 과장할 것입니다. (경사가 더 심하게 보이게 만듭니다.) 기본값은 1(과장 없음)입니다. |
Generate relief classes automatically |
|
[boolean] 기본값: False |
이 옵션을 활성화하면 알고리즘이 기복 색상 범주를 자동으로 생성할 것입니다. |
Relief colors 선택적 |
|
[table widget] |
기복 색상을 직접 선택하고 싶은 경우 테이블 위젯을 사용합니다. 사용자가 원하는만큼 많은 색상 범주를 추가할 수 있습니다. 각 범주 마다 최소 및 최대 범위를 선택한 다음 마지막으로 색상 행을 클릭하면 색상 위젯에서 색상을 선택할 수 있습니다. 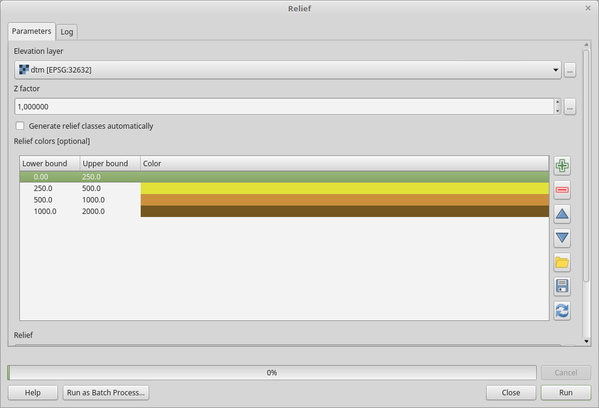
그림 24.77 기복 색상 범주를 직접 설정하기 패널 오른쪽에 있는 버튼들로 다음 작업을 할 수 있습니다: 색상 범주를 추가하거나 제거하고, 이미 정의된 색상 범주의 순서를 변경하고, 색상 범주를 가진 기존 파일을 열고, 현재 색상 범주를 파일로 저장할 수 있습니다. |
Relief |
|
[raster] 기본값: |
Specify the output relief raster layer. One of:
|
Frequency distribution 선택적 |
|
[vector: table] 기본값: |
Specify the CSV table for the output frequency distribution. One of:
|
산출물
라벨 |
이름 |
유형 |
설명 |
|---|---|---|---|
Relief |
|
[raster] |
산출 기복 래스터 레이어 |
Frequency distribution |
|
[vector: table] |
산출 도수 분포 |
파이썬 코드
알고리즘 ID: qgis:relief
import processing
processing.run("algorithm_id", {parameter_dictionary})
공간 처리 툴박스에 있는 알고리즘 위에 마우스를 가져가면 알고리즘 ID 를 표시합니다. 파라미터 목록(dictionary) 은 파라미터 이름 및 값을 제공합니다. 파이썬 콘솔에서 공간 처리 알고리즘을 어떻게 실행하는지 자세히 알고 싶다면 콘솔에서 공간 처리 알고리즘 사용 을 참조하세요.
24.1.20.7. 험상 지수
라일리(Shawn J. Riley)와 디글로리아(Stephen D. Degloria)의 1999년 논문 에서 설명하는 지형 이질성(heterogeneity)의 정량적 측정을 계산합니다. 모든 위치에서 3x3 픽셀 그리드 내부의 표고 변화를 요약해서 험상 지수(Ruggedness Index)를 계산합니다.
각 픽셀은 중심 셀과 중심 셀을 둘러싼 셀 8개의 표고 차를 담고 있습니다.
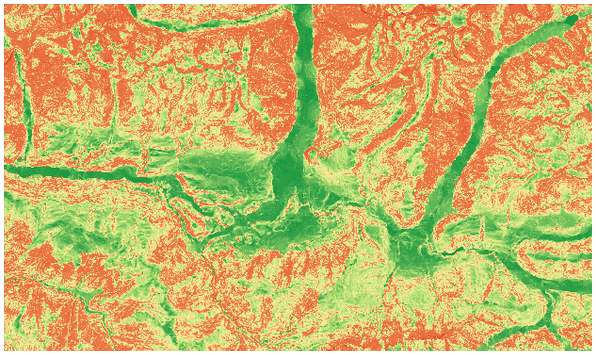
그림 24.78 낮은 값(빨간색)에서 높은 값(녹색)까지의 변화를 보여주는 험상 레이어
파라미터
라벨 |
이름 |
유형 |
설명 |
|---|---|---|---|
Elevation layer |
|
[raster] |
DTM 래스터 레이어 |
Z factor |
|
[numeric: double] 기본값: 1.0 |
수직 과장(exaggeration). 이 파라미터는 Z 단위가 X 및 Y 단위와, 예를 들어 피트와 미터처럼 다를 때 유용합니다. 이 파라미터를 사용해서 차이를 조정할 수 있습니다. 이 파라미터의 값을 증가시키면 마지막 결과물을 과장할 것입니다. (험상이 더 심하게 보이게 만듭니다.) 기본값은 1(과장 없음)입니다. |
Ruggedness |
|
[raster] 기본값: |
Specify the output ruggedness raster layer. One of:
|
산출물
라벨 |
이름 |
유형 |
설명 |
|---|---|---|---|
Ruggedness |
|
[raster] |
산출 험상 래스터 레이어 |
파이썬 코드
Algorithm ID: native:ruggednessindex
import processing
processing.run("algorithm_id", {parameter_dictionary})
공간 처리 툴박스에 있는 알고리즘 위에 마우스를 가져가면 알고리즘 ID 를 표시합니다. 파라미터 목록(dictionary) 은 파라미터 이름 및 값을 제공합니다. 파이썬 콘솔에서 공간 처리 알고리즘을 어떻게 실행하는지 자세히 알고 싶다면 콘솔에서 공간 처리 알고리즘 사용 을 참조하세요.
24.1.20.8. 경사
입력 래스터 레이어로부터 경사도(slope)를 계산합니다. 경사도란 지형의 기울어진 각도를 말하며, 도 단위 로 표현됩니다.
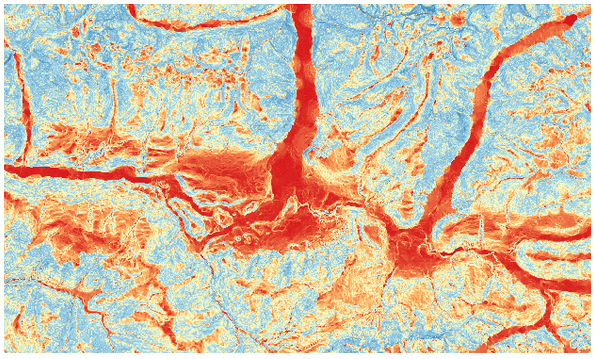
그림 24.79 평평한 영역은 빨간색, 경사진 영역은 파란색
파라미터
라벨 |
이름 |
유형 |
설명 |
|---|---|---|---|
Elevation layer |
|
[raster] |
DTM 래스터 레이어 |
Z factor |
|
[numeric: double] 기본값: 1.0 |
수직 과장(exaggeration). 이 파라미터는 Z 단위가 X 및 Y 단위와, 예를 들어 피트와 미터처럼 다를 때 유용합니다. 이 파라미터를 사용해서 차이를 조정할 수 있습니다. 이 파라미터의 값을 증가시키면 마지막 결과물을 과장할 것입니다. (경사가 더 심하게 보이게 만듭니다.) 기본값은 1(과장 없음)입니다. |
Slope |
|
[raster] 기본값: |
Specify the output slope raster layer. One of:
|
산출물
라벨 |
이름 |
유형 |
설명 |
|---|---|---|---|
Slope |
|
[raster] |
산출 경사도 래스터 레이어 |
파이썬 코드
Algorithm ID: native:slope
import processing
processing.run("algorithm_id", {parameter_dictionary})
공간 처리 툴박스에 있는 알고리즘 위에 마우스를 가져가면 알고리즘 ID 를 표시합니다. 파라미터 목록(dictionary) 은 파라미터 이름 및 값을 제공합니다. 파이썬 콘솔에서 공간 처리 알고리즘을 어떻게 실행하는지 자세히 알고 싶다면 콘솔에서 공간 처리 알고리즘 사용 을 참조하세요.