Importante
La traduzione è uno sforzo comunitario a cui puoi unirti. Questa pagina è attualmente tradotta al 100.00%.
28.1.14. Estrazione Nuvola di Punti
NEW in 3.32
28.1.14.1. Confine
Esporta un file poligonale contenente il confine del layer della nuvola di punti. Può contenere buchi e può essere un poligono a parti multiple.
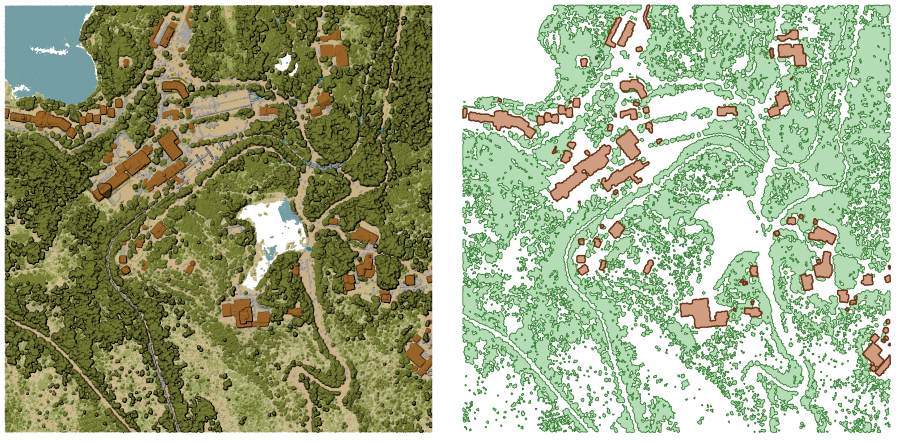
Fig. 28.16 Estrazione di poligoni con elevato livello di vegetazione e di edifici da un layer di nuvola di punti in ingresso
Parametri
Parametri di Base
Etichetta |
Nome |
Tipo |
Descrizione |
|---|---|---|---|
Layer in ingresso |
|
[point cloud] |
Layer della nuvola di punti in ingresso su cui calcolare il confine |
Risoluzione delle celle utilizzate per calcolare il confine Opzionale |
|
[number] |
Risoluzione delle celle utilizzate per calcolare il confine |
Numero minimo di punti in una cella per considerare la cella occupata Opzionale |
|
[number] |
Numero minimo di punti in una cella per considerare la cella occupata |
Confine |
|
[vector: polygon] Predefinito: |
Specifica il file della nuvola di punti da utilizzare in uscita. Uno dei seguenti:
|
Parametri Avanzati
Etichetta |
Nome |
Tipo |
Descrizione |
|---|---|---|---|
Espressione filtro Opzionale |
|
[expression] |
Una PDAL expression per selezionare un sottoinsieme di elementi nei dati della nuvola di punti |
Estensione su cui applicare l’algoritmo Opzionale |
|
[extent] |
Un’estensione della mappa per selezionare un sottoinsieme di elementi nei dati della nuvola di punti I metodi disponibili sono:
|
In uscita:
Etichetta |
Nome |
Tipo |
Descrizione |
|---|---|---|---|
Confine |
|
[vector: polygon] |
Layer vettoriale poligonale in uscita con il confine della nuvola di punti. Il formato attualmente supportato è |
Codice Python
ID Algorimo: pdal:boundary
import processing
processing.run("algorithm_id", {parameter_dictionary})
L” id dell’algoritmo viene visualizzato quando si passa il mouse sull’algoritmo nella finestra degli strumenti di elaborazione. Il dizionario dei parametri fornisce i Nomi e i valori dei parametri. Vedi Usare gli algoritmi di Processing dalla console dei comandi per dettagli su come eseguire algoritmi di elaborazione dalla console Python.
28.1.14.2. Densità
Esporta un file raster in base al numero di punti all’interno di ogni cella raster - utile per il controllo della qualità dei dataset di nuvole di punti.
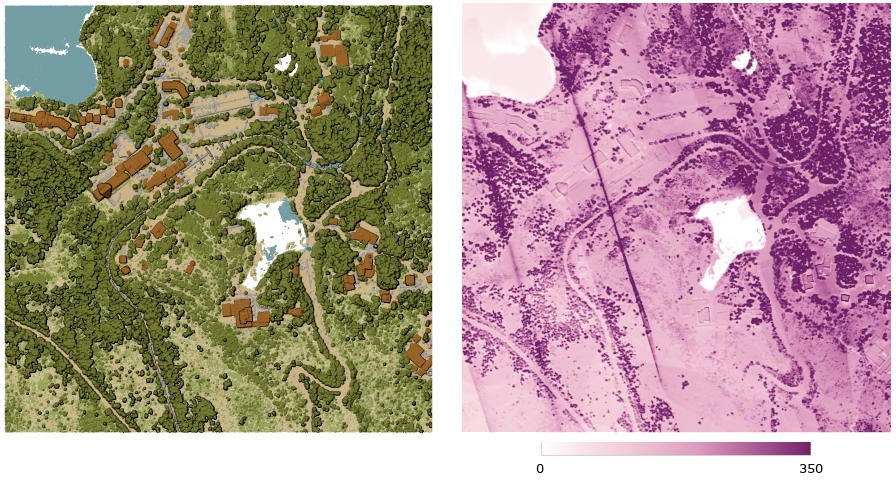
Fig. 28.17 Densità di punti (numero di punti per 2x2 m) come raster
Parametri
Parametri di Base
Etichetta |
Nome |
Tipo |
Descrizione |
|---|---|---|---|
Layer in ingresso |
|
[point cloud] |
Layer nuvola di punti in ingresso da esportare |
Risoluzione del raster di densità |
|
[number] Predefinito: 1.0 |
Dimensione della cella del raster in uscita |
Dimensioni tasselli per operazioni in parallelo |
|
[number] Predefinito: 1000 |
Dimensione dei tasselli in cui suddividere i dati per operazioni in parallelo |
Densità |
|
[raster] Predefinito: |
Specifica il file raster in cui esportare i dati. Uno dei seguenti:
|
Parametri Avanzati
Etichetta |
Nome |
Tipo |
Descrizione |
|---|---|---|---|
Espressione filtro Opzionale |
|
[expression] |
Una PDAL expression per selezionare un sottoinsieme di elementi nei dati della nuvola di punti |
Estensione su cui applicare l’algoritmo Opzionale |
|
[extent] |
Un’estensione della mappa per selezionare un sottoinsieme di elementi nei dati della nuvola di punti I metodi disponibili sono:
|
origine X di un tassello per operazioni in parallelo Opzionale |
|
[number] |
|
origine Y di un tassello per operazioni in parallelo Opzionale |
|
[number] |
In uscita:
Etichetta |
Nome |
Tipo |
Descrizione |
|---|---|---|---|
Densità |
|
[raster] |
Layer raster in uscita con il numero di punti all’interno di ogni cella. Il formato attualmente supportato è |
Codice Python
Id Algoritmo: pdal:density
import processing
processing.run("algorithm_id", {parameter_dictionary})
L” id dell’algoritmo viene visualizzato quando si passa il mouse sull’algoritmo nella finestra degli strumenti di elaborazione. Il dizionario dei parametri fornisce i Nomi e i valori dei parametri. Vedi Usare gli algoritmi di Processing dalla console dei comandi per dettagli su come eseguire algoritmi di elaborazione dalla console Python.
28.1.14.3. filtro
Estrae dalla nuvola di punti in ingresso i punti che corrispondono all’espressione PDAL e/o che si trovano all’interno di un rettangolo di ritaglio.
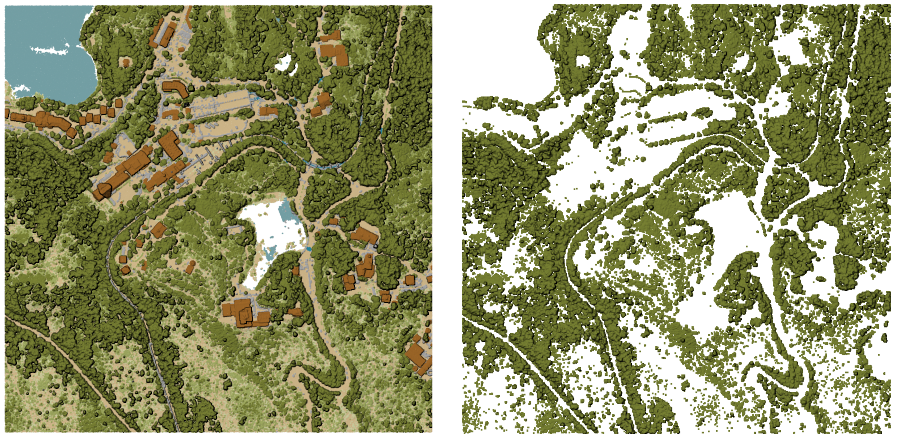
Fig. 28.18 Filtraggio della classe di alta vegetazione da un layer di nuvole di punti in ingresso
Parametri
Etichetta |
Nome |
Tipo |
Descrizione |
|---|---|---|---|
Layer in ingresso |
|
[point cloud] |
Layer nuvola di punti in ingresso da esportare |
Espressione filtro Opzionale |
|
[expression] |
Una PDAL expression per selezionare un sottoinsieme di elementi nei dati della nuvola di punti |
Estensione su cui applicare l’algoritmo Opzionale |
|
[extent] |
Un’estensione della mappa per selezionare un sottoinsieme di elementi nei dati della nuvola di punti I metodi disponibili sono:
|
Filtrati |
|
[point cloud] Predefinito: |
Specifica il file della nuvola di punti in cui esportare i dati. Uno dei seguenti:
|
In uscita:
Etichetta |
Nome |
Tipo |
Descrizione |
|---|---|---|---|
Filtrati |
|
[point cloud] |
Layer nuvola di punti in uscita con gli elementi filtrati del layer nuvola di punti in ingresso. I formati attualmente supportati sono |
Codice Python
ID Algorimo: pdal:filter
import processing
processing.run("algorithm_id", {parameter_dictionary})
L” id dell’algoritmo viene visualizzato quando si passa il mouse sull’algoritmo nella finestra degli strumenti di elaborazione. Il dizionario dei parametri fornisce i Nomi e i valori dei parametri. Vedi Usare gli algoritmi di Processing dalla console dei comandi per dettagli su come eseguire algoritmi di elaborazione dalla console Python.