Importante
Translation is a community effort you can join. This page is currently translated at 72.38%.
28.1.12. Point Cloud Conversion
NEW in 3.32
28.1.12.1. Converter formato
Converts a point cloud to a different file format, e.g. creates a compressed .LAZ.
Parâmetros
Rótulo |
Nome |
Tipo |
Descrição |
|---|---|---|---|
Camada de entrada |
|
[point cloud] |
Input point cloud layer to convert |
Convertido |
|
[point cloud] Padrão: |
Specify the point cloud file to use as output. One of:
|
Saídas
Rótulo |
Nome |
Tipo |
Descrição |
|---|---|---|---|
Convertido |
|
[point cloud] |
Output point cloud layer in a modified file format.
Currently supported formats are |
Código Python
Algorithm ID: pdal:convertformat
import processing
processing.run("algorithm_id", {parameter_dictionary})
O id do algoritmo é exibido quando você passa o mouse sobre o algoritmo na Caixa de ferramentas de processamento. O dicionário de parâmetros fornece os nomes e valores dos parâmetros. Veja Usando os algoritmos do processamento a partir do Terminal Python. para detalhes sobre como executar algoritmos de processamento a partir do console Python.
28.1.12.2. Export to raster
Exports point cloud data to a 2D raster grid having cell size of given resolution, writing values from the specified attribute.
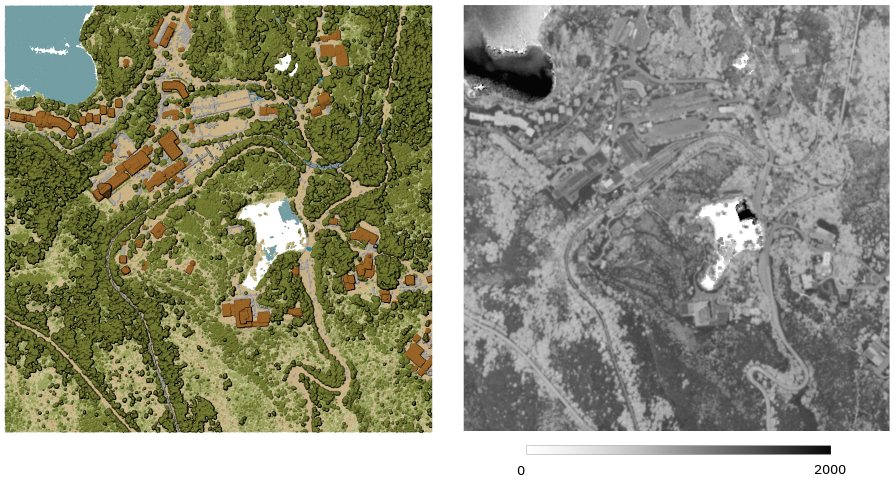
Fig. 28.10 Raster output using Intensity attribute of points
Parâmetros
Parâmetros básicos
Rótulo |
Nome |
Tipo |
Descrição |
|---|---|---|---|
Camada de entrada |
|
[point cloud] |
Input point cloud layer to export |
Atributo |
|
[field] [enumeration] |
A Field of the point cloud layer to extract the values from |
Resolution of the density raster |
|
[número] Padrão: 1.0 |
Cell size of the output raster |
Tile size for parallel runs |
|
[número] Padrão: 1000 |
|
Exported |
|
[raster] Padrão: |
Specify the raster file to export the data to. One of:
|
Parâmetros avançados
Rótulo |
Nome |
Tipo |
Descrição |
|---|---|---|---|
Expressão do filtro Opcional |
|
[expressão] |
A PDAL expression for selecting a subset of features in the point cloud data |
Cropping extent Opcional |
|
[extensão] |
A map extent for selecting a subset of features in the point cloud data Os métodos disponíveis são:
|
X origin of a tile for parallel runs Opcional |
|
[número] |
|
Y origin of a tile for parallel runs Opcional |
|
[número] |
Saídas
Rótulo |
Nome |
Tipo |
Descrição |
|---|---|---|---|
Exported |
|
[raster] |
Output raster layer features of the point cloud layer are exported to.
Currently supported format is |
Código Python
Algorithm ID: pdal:exportraster
import processing
processing.run("algorithm_id", {parameter_dictionary})
O id do algoritmo é exibido quando você passa o mouse sobre o algoritmo na Caixa de ferramentas de processamento. O dicionário de parâmetros fornece os nomes e valores dos parâmetros. Veja Usando os algoritmos do processamento a partir do Terminal Python. para detalhes sobre como executar algoritmos de processamento a partir do console Python.
28.1.12.3. Export raster (using triangulation)
Exports point cloud data to a 2D raster grid using a triangulation of points and then interpolating cell values from triangles.
Nota
Using this algorithm can be slower if you are dealing with a large dataset. If your point cloud is dense, you can export your ground points as a raster using the Export to raster algorithm.
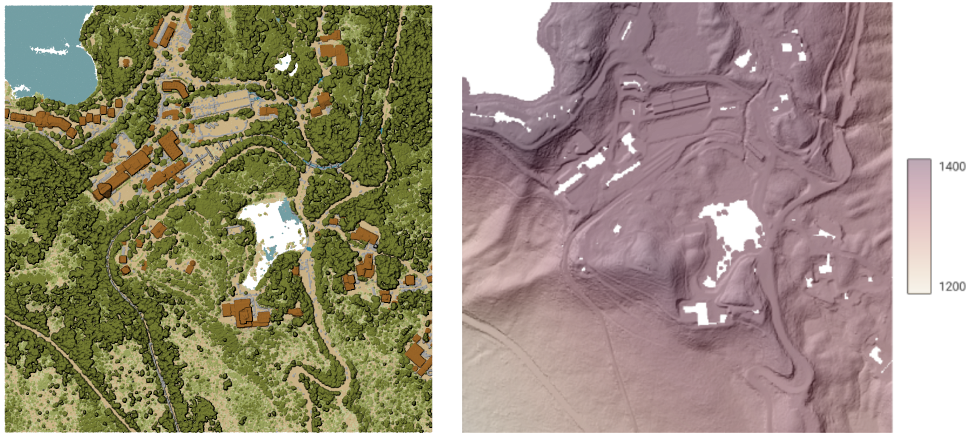
Fig. 28.11 Terrain raster output generated by point cloud triangulation
Parâmetros
Parâmetros básicos
Rótulo |
Nome |
Tipo |
Descrição |
|---|---|---|---|
Camada de entrada |
|
[point cloud] |
Input point cloud layer to export |
Resolution of the density raster |
|
[número] Padrão: 1.0 |
Cell size of the output raster |
Tile size for parallel runs |
|
[número] Padrão: 1000 |
|
Exported |
|
[raster] Padrão: |
Specify the raster file to export the data to. One of:
|
Parâmetros avançados
Rótulo |
Nome |
Tipo |
Descrição |
|---|---|---|---|
Expressão do filtro Opcional |
|
[expressão] |
A PDAL expression for selecting a subset of features in the point cloud data |
Cropping extent Opcional |
|
[extensão] |
A map extent for selecting a subset of features in the point cloud data Os métodos disponíveis são:
|
X origin of a tile for parallel runs Opcional |
|
[número] |
|
Y origin of a tile for parallel runs Opcional |
|
[número] |
Saídas
Rótulo |
Nome |
Tipo |
Descrição |
|---|---|---|---|
Exported (using triangulation) |
|
[raster] |
Output raster layer features of the point cloud layer are exported to.
Currently supported format is |
Código Python
Algorithm ID: pdal:exportrastertin
import processing
processing.run("algorithm_id", {parameter_dictionary})
O id do algoritmo é exibido quando você passa o mouse sobre o algoritmo na Caixa de ferramentas de processamento. O dicionário de parâmetros fornece os nomes e valores dos parâmetros. Veja Usando os algoritmos do processamento a partir do Terminal Python. para detalhes sobre como executar algoritmos de processamento a partir do console Python.
28.1.12.4. Export to vector
Exports point cloud data to a vector layer with 3D points (a GeoPackage), optionally with extra attributes.
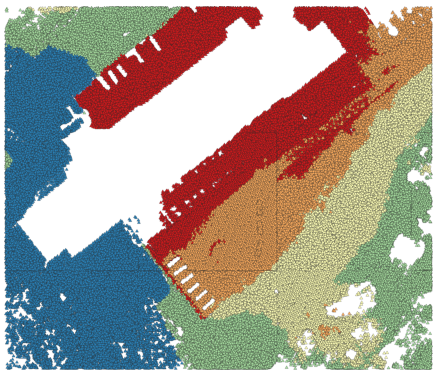
Fig. 28.12 Exporting point cloud (ground points) to a vector layer styled based on the elevation
Parâmetros
Parâmetros básicos
Rótulo |
Nome |
Tipo |
Descrição |
|---|---|---|---|
Camada de entrada |
|
[point cloud] |
Input point cloud layer to export |
Atributo Opcional |
|
[field] [list] |
One or more fields of the point cloud layer to export with the points. |
Exported |
|
[vetor] Padrão: |
Specify the vector file to export the data to. One of:
|
Parâmetros avançados
Rótulo |
Nome |
Tipo |
Descrição |
|---|---|---|---|
Expressão do filtro Opcional |
|
[expressão] |
A PDAL expression for selecting a subset of features in the point cloud data |
Cropping extent Opcional |
|
[extensão] |
A map extent for selecting a subset of features in the point cloud data Os métodos disponíveis são:
|
Saídas
Rótulo |
Nome |
Tipo |
Descrição |
|---|---|---|---|
Exported |
|
[vetor] |
Output vector layer features of the point cloud layer are exported to.
Currently supported format is |
Código Python
Algorithm ID: pdal:exportvector
import processing
processing.run("algorithm_id", {parameter_dictionary})
O id do algoritmo é exibido quando você passa o mouse sobre o algoritmo na Caixa de ferramentas de processamento. O dicionário de parâmetros fornece os nomes e valores dos parâmetros. Veja Usando os algoritmos do processamento a partir do Terminal Python. para detalhes sobre como executar algoritmos de processamento a partir do console Python.