Belangrijk
Vertalen is een inspanning van de gemeenschap waaraan u deel kunt nemen. Deze pagina is momenteel voor 100.00% vertaald.
24.1.20. Raster Terreinanalyse
24.1.20.1. Ligging
Berekent de ligging van de invoer Digital Terrain Model. De uiteindelijke rasterlaag voor de ligging bevat waarden van 0 tot en met 360 die de richting van de helling aangeven: beginnend vanuit het noorden (0°) en doorlopend met de klok mee.
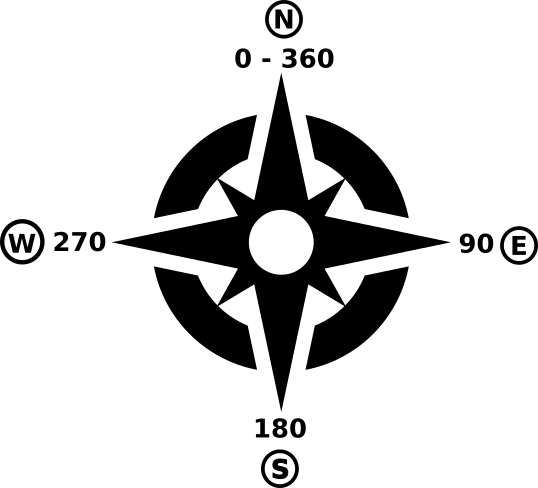
Fig. 24.71 Waarden voor ligging
De volgende afbeelding geeft de laag voor de ligging weer, geclassificeerd met een kleurverloop:
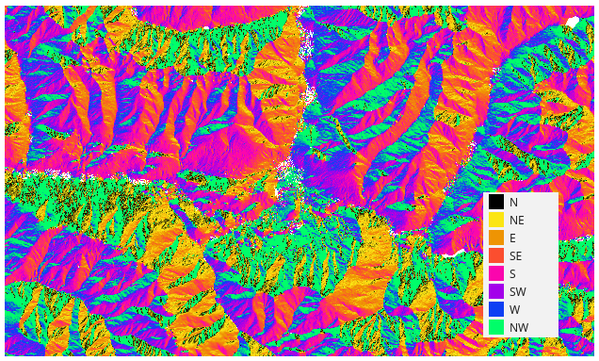
Fig. 24.72 Laag voor de ligging opnieuw geclassificeerd
Parameters
Label |
Naam |
Type |
Omschrijving |
|---|---|---|---|
Hoogtelaag |
|
[raster] |
Digital Terrain Model-rasterlaag |
Z-factor |
|
[numeriek: double] Standaard: 1.0 |
Verticale overdrijving. Deze parameter is nuttig als de eenheden voor Z verschillen van die voor X en Y, bijvoorbeeld mijlen en meters. U kunt deze parameter gebruiken om het uiteindelijke resultaat aan te passen. De standaard is 1 (geen overdrijving). |
Aspect |
|
[raster] Standaard: |
Specificeer de uitvoer rasterlaag voor het aspect. Een van:
|
Uitvoer
Label |
Naam |
Type |
Omschrijving |
|---|---|---|---|
Aspect |
|
[raster] |
De uitvoerlaag voor het aspect |
Pythoncode
ID algoritme: native:aspect
import processing
processing.run("algorithm_id", {parameter_dictionary})
Het ID voor het algoritme wordt weergegeven als u over het algoritme gaat met de muisaanwijzer in de Toolbox van Processing. Het woordenboek voor de parameters verschaft de NAME’s en waarden van de parameters. Bekijk Processing algoritmes gebruiken vanaf de console voor details over hoe algoritmes van Processing uit te voeren vanuit de console voor Python.
24.1.20.2. DTM filteren (gebaseerd op helling)
Toegevoegd in 3.34
Kan worden gebruikt om een digitaal hoogtemodel te filteren om de cellen ervan te kunnen classificeren als grond- en object- (niet grond) cellen.
Het gereedschap gebruikt concepten zoals beschreven door Vosselman (2000) en is gebaseerd op de aanname dat een grote verschil in hoogte tussen twee nabijgelegen cellen niet waarschijnlijk wordt veroorzaakt door een steile helling in het terrein. De waarschijnlijkheid dat de hoogste cel niet-grond zou kunnen zijn, wordt vergroot als de afstand tussen de twee cellen afneemt. Daar definieert het filter een maximum verschil in hoogte (dz_max) tussen twee cellen als een functie van de afstand (d) tussen de cellen (dz_max( d ) = d). Een cel wordt geclassificeerd als terrein als er geen cel is binnen de straal van de kernel waarbij het verschil in hoogte groter is dan het maximale toegestane verschil in hoogte op de afstand tussen deze twee cellen.
De parameter voor de geschatte helling van het terrein (s) wordt gebruikt om de functie Filter aan te passen om overeen te komen met de algehele helling in het betreffende gebied (dz_max( d ) = d * s). Een 5 % interval van vertrouwen (ci = 1.65 * sqrt( 2 * stddev )) kan worden gebruikt om de functie Filter zelfs nog verder aan te passen, door het criterium voor het filter ofwel te verzwakken (dz_max( d ) = d * s + ci) of te versterken (dz_max( d ) = d * s - ci).
Verwijzingen: Vosselman, G. (2000): Slope based filtering of laser altimetry data. IAPRS, Vol. XXXIII, Part B3, Amsterdam, The Netherlands, 935-942
Zie ook
Dit gereedschap is een port van het SAGA DTM Filter (slope-based)
Parameters
Basis parameters
Label |
Naam |
Type |
Omschrijving |
|---|---|---|---|
Invoerlaag |
|
[raster] |
Digital Terrain Model-rasterlaag |
Bandnummer |
|
[rasterband] |
De te overwegen band van de DEM |
Straal kernel (pixels) |
|
[numeriek: integer] Standaard: 5 |
De straal van de kernel van het filter (in pixels). Moet groot genoeg zijn om grondcellen naast objecten niet-grond te bereiken. |
Helling terrein (%, pixel grootte/verticale eenheden) |
|
[numeriek: double] Standaard: 30.0 |
De geschatte helling van het terrein in |
Aanpassen filter |
|
[lijst] Standaard: 0 |
Kies of de kernel van het filter moet worden toegepast zonder aanpassing of om een interval voor vertrouwen te gebruiken om het criterium voor de hoogte af te zwakken of te versterken.
|
Standaard afwijking |
|
[numeriek: double] Standaard: 0.1 |
De standaardafwijking gebruikt om een interval van vertrouwen van 5% te berekenen, toegepast op de drempel voor de hoogte. |
Uitvoerlaag (grond) Optioneel |
|
[raster] Standaard: |
Specificeer de gefilterde DEM die alleen cellen bevat die zijn geclassificeerd als grond. Een van:
|
Uitvoerlaag (niet-grond objecten) Optioneel |
|
[raster] Standaard: |
Specificeer de niet-grond objecten die zijn verwijderd door het filter. Een van:
|
Gevorderde parameters
Label |
Naam |
Type |
Omschrijving |
|---|---|---|---|
Opties voor maken Optioneel
|
|
[tekenreeks] Standaard: ‘’ |
Voor toevoegen van een of meer opties voor het beheren van het te maken bestand (kleuren, blokgrootte, bestandscompressie…). Voor het gemak kunt u vertrouwen op vooraf gedefinieerde profielen (bekijk het gedeelte over opties voor GDAL driver). Voor Batch-processen en Modelontwerper: scheid meerdere opties door een teken pipe ( |
Uitvoer
Label |
Naam |
Type |
Omschrijving |
|---|---|---|---|
Uitvoerlaag (grond) |
|
[raster] |
De gefilterde DEM die alleen cellen bevat die zijn geclassificeerd als grond. |
Uitvoerlaag (niet-grond objecten) |
|
[raster] |
De niet-grond objecten die werden verwijderd door het filter. |
Pythoncode
ID algoritme: native:dtmslopebasedfilter
import processing
processing.run("algorithm_id", {parameter_dictionary})
Het ID voor het algoritme wordt weergegeven als u over het algoritme gaat met de muisaanwijzer in de Toolbox van Processing. Het woordenboek voor de parameters verschaft de NAME’s en waarden van de parameters. Bekijk Processing algoritmes gebruiken vanaf de console voor details over hoe algoritmes van Processing uit te voeren vanuit de console voor Python.
24.1.20.3. Fill sinks (Wang & Liu)
Toegevoegd in 3.44
Gebruikt een methode die werd voorgesteld door Wang & Liu om verlagingen in oppervlakten te identificeren en te vullen in digitale hoogtemodellen.
De methode werd verbeterd om toe te staan om hydrologische hoogtemodellen mogelijk te maken, d.i. niet alleen de verlaging(en) te vullen, maar ook om een aflopende helling langs het stroompad te behouden. Indien gewenst wordt dat bereikt door een minimaal hellingsverloop te behouden (en dus hoogteverschil) tussen cellen.
Verwijzingen: Wang, L. & H. Liu (2006): An efficient method for identifying and filling surface depressions in digital elevation models for hydrologic analysis and modelling. International Journal of Geographical Information Science, Vol. 20, No. 2: 193-213.
Zie ook
Dit gereedschap is een port van het gereedschap voor SAGA Fill Sinks (Wang & Liu).
Parameters
Basis parameters
Label |
Naam |
Type |
Omschrijving |
|---|---|---|---|
Invoerlaag |
|
[raster] |
Digital Terrain Model-rasterlaag |
Bandnummer |
|
[rasterband] Standaard: 1 |
De te overwegen band van de DEM |
Minimale helling (graden) |
|
[numeriek: double] Standaard: 0.10 |
Minimaal verloop voor helling om van cel naar cel te behouden; met waarde nul worden afvoeren gevuld tot de hoogte voor overstromen (wat resulteert in vlakke gebieden). |
Uitvoerlaag (gevulde DEM) Optioneel |
|
[raster] Standaard: |
Specificeer de uitvoerlaag die overeenkomt met de DEM zonder verlagingen. Een van:
|
Uitvoerlaag (stroomrichtingen) Optioneel |
|
[raster] Standaard: |
Specificeer de uitvoerlaag met de berekende stroomrichtingen. Een van:
|
Uitvoerlaag (bassins waterberging) Optioneel |
|
[raster] Standaard: |
Specificeer de uitvoerlaag die overeenkomt met de afgebakende bassins voor waterberging. Een van:
|
Gevorderde parameters
Label |
Naam |
Type |
Omschrijving |
|---|---|---|---|
Opties voor maken Optioneel |
|
[tekenreeks] Standaard: ‘’ |
Voor toevoegen van een of meer opties voor het beheren van het te maken bestand (kleuren, blokgrootte, bestandscompressie…). Voor het gemak kunt u vertrouwen op vooraf gedefinieerde profielen (bekijk het gedeelte over opties voor GDAL driver). Voor Batch-processen en Modelontwerper: scheid meerdere opties door een teken pipe ( |
Uitvoer
Label |
Naam |
Type |
Omschrijving |
|---|---|---|---|
Uitvoerlaag (gevulde DEM) |
|
[raster] |
Uitvoerlaag die overeenkomt met het digitale hoogtemodel zonder verlagingen. |
Uitvoerlaag (stroomrichtingen) |
|
[raster] |
Uitvoer rasterlaag met de berekende stroomrichtingen; 0=N, 1=NO, 2=O, … 7=NW. |
Uitvoerlaag (bassins waterberging) |
|
[raster] |
Uitvoerlaag die overeenkomt met de afgebakende bassins voor waterberging. |
Pythoncode
ID algoritme: native:fillsinkswangliu
import processing
processing.run("algorithm_id", {parameter_dictionary})
Het ID voor het algoritme wordt weergegeven als u over het algoritme gaat met de muisaanwijzer in de Toolbox van Processing. Het woordenboek voor de parameters verschaft de NAME’s en waarden van de parameters. Bekijk Processing algoritmes gebruiken vanaf de console voor details over hoe algoritmes van Processing uit te voeren vanuit de console voor Python.
24.1.20.4. Schaduw voor heuvels
Berekent de rasterlaag voor schaduw op de heuvels, gegeven een invoer Digital Terrain Model.
De schaduw op de laag wordt berekend overeenkomstig de positie van de zon: u heeft de opties om zowel de horizontale hoek (azimut) als de verticale hoek (hoogte van de zon) van de zon te wijzigen.
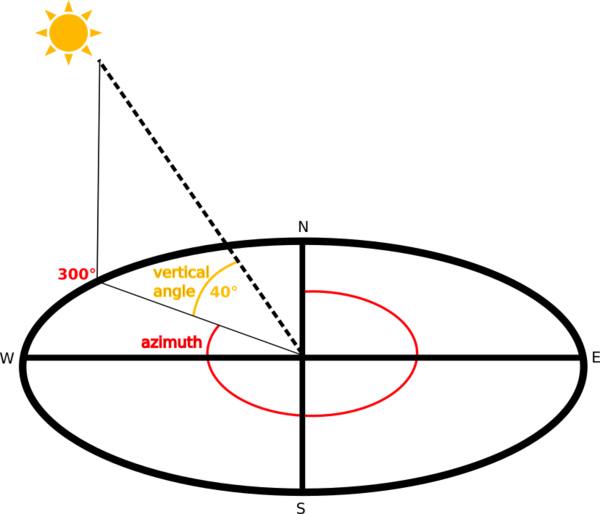
Fig. 24.73 Azimut en verticale hoek
De laag met de schaduw voor de heuvels bevat waarden van 0 (volledige schaduw) tot en met 255 (volledig in de zon). Schaduw voor de heuvels wordt gewoonlijk gebruikt om het reliëf van het gebied beter te kunnen begrijpen.
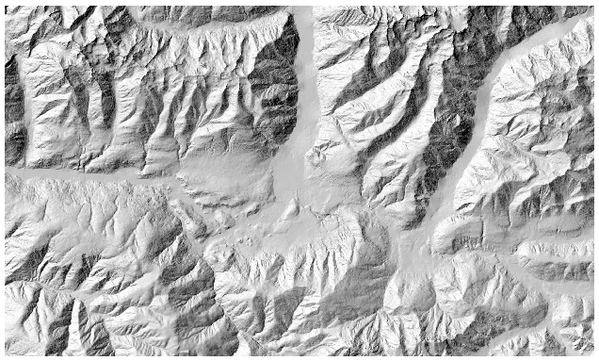
Fig. 24.74 Laag met schaduw voor de heuvels met azimut 300 en verticale hoek van 45|degree|
Het is bijzonder interessant om de laag met schaduw voor de heuvels een transparante waarde te geven en te laten overlappen met het hoogteraster:
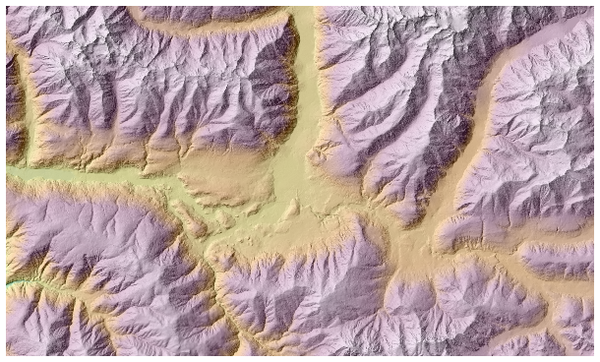
Fig. 24.75 Overlappen van de schaduw voor de heuvels met de hoogtelaag
Parameters
Label |
Naam |
Type |
Omschrijving |
|---|---|---|---|
Hoogtelaag |
|
[raster] |
Digital Terrain Model-rasterlaag |
Z-factor |
|
[numeriek: double] Standaard: 1.0 |
Verticale overdrijving. Deze parameter is nuttig als de eenheden voor Z verschillen van die voor X en Y, bijvoorbeeld mijlen en meters. U kunt deze parameter gebruiken om dit aan te passen. Verhogen van de waarde van deze parameter zal het uiteindelijke resultaat overdrijven (ziet er meer “heuvelig” uit). De standaard is 1 (geen overdrijving). |
Azimut (horizontale hoek) |
|
[numeriek: double] Standaard: 300.0 |
Stel de horizontale hoek (in graden) ten opzichte van de zon in (met de klok mee). Bereik: 0 tot en met 360. 0 is Noord. |
Verticale hoek |
|
[numeriek: double] Standaard: 40.0 |
Stelt de verticale hoek (in graden) ten opzichte van de zon in, dat is de hoogte van de zon. Het bereik van deze waarden loopt vanaf 0 (minimale hoogte) tot en met 90 (maximale hoogte). |
Schaduw voor heuvels |
|
[raster] Standaard: |
Specificeer de uitvoer rasterlaag voor de schaduw van de heuvels. Een van:
|
Uitvoer
Label |
Naam |
Type |
Omschrijving |
|---|---|---|---|
Schaduw voor heuvels |
|
[raster] |
De uitvoerlaag voor de schaduw van de heuvels |
Pythoncode
ID algoritme: native:hillshade
import processing
processing.run("algorithm_id", {parameter_dictionary})
Het ID voor het algoritme wordt weergegeven als u over het algoritme gaat met de muisaanwijzer in de Toolbox van Processing. Het woordenboek voor de parameters verschaft de NAME’s en waarden van de parameters. Bekijk Processing algoritmes gebruiken vanaf de console voor details over hoe algoritmes van Processing uit te voeren vanuit de console voor Python.
24.1.20.5. Hypsometrische bogen
Berekent hypsometrische bogen voor een Digital Elevation Model als invoer. Bogen worden gemaakt als CSV-bestanden in een map voor de uitvoer, gespecificeerd door de gebruiker.
Een hypsometrische boog is een cumulatief histogram van hoogtewaarden in een geografisch gebied.
U kunt hypsometrische bogen gebruiken om verschillen te ontdekken in het landschap wegens de geomorfologie van het gebied.
Parameters
Label |
Naam |
Type |
Omschrijving |
|---|---|---|---|
DEM om te analyseren |
|
[raster] |
Digital Terrain Model-rasterlaag die gebruikt moet worden voor berekenen van hoogten |
Grenslaag |
|
[vector: polygoon] |
Polygoon vectorlaag met grenzen van gebieden die gebruikt moet worden om hypsometrische bogen te berekenen. |
Stap |
|
[numeriek: double] Standaard: 100.0 |
Verticale afstand tussen bogen |
% van gebied gebruiken in plaats van absolute waarde |
|
[Booleaanse waarde] Standaard: False |
Percentage van gebied wegschrijven naar veld “Area” van het CSV-bestand in plaats van het absolute gebied |
Hypsometrische bogen |
|
[map] |
Specificeer de map voor de uitvoer voor de hypsometrische bogen. Een van:
|
Uitvoer
Label |
Naam |
Type |
Omschrijving |
|---|---|---|---|
Hypsometrische bogen |
|
[map] |
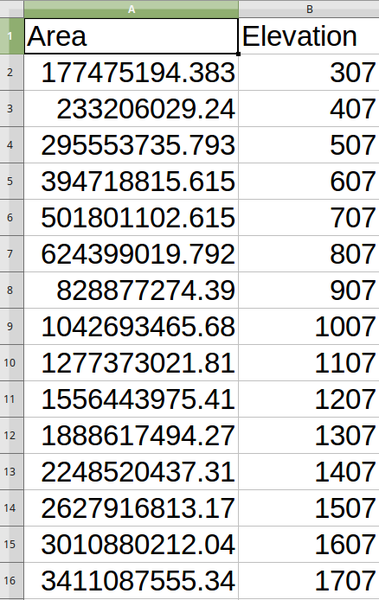
Map waar de bestanden met de hypsometrische bogen zullen worden opgeslagen. Voor elk object uit de invoer vectorlaag zal een CSV-bestand met waarden voor gebied en hoogte worden gemaakt. De bestandsnamen beginnen met |
Pythoncode
ID algoritme: qgis:hypsometriccurves
import processing
processing.run("algorithm_id", {parameter_dictionary})
Het ID voor het algoritme wordt weergegeven als u over het algoritme gaat met de muisaanwijzer in de Toolbox van Processing. Het woordenboek voor de parameters verschaft de NAME’s en waarden van de parameters. Bekijk Processing algoritmes gebruiken vanaf de console voor details over hoe algoritmes van Processing uit te voeren vanuit de console voor Python.
24.1.20.6. Reliëf
Maakt een reliëflaag met schaduw uit gegevens voor digitale hoogte. U kunt handmatig kleuren voor het reliëf specificeren of u kunt het algoritme automatisch alle klassen voor het reliëf laten kiezen.

Fig. 24.76 Reliëflaag
Parameters
Label |
Naam |
Type |
Omschrijving |
|---|---|---|---|
Hoogtelaag |
|
[raster] |
Digital Terrain Model-rasterlaag |
Z-factor |
|
[numeriek: double] Standaard: 1.0 |
Verticale overdrijving. Deze parameter is nuttig als de eenheden voor Z verschillen van die voor X en Y, bijvoorbeeld mijlen en meters. U kunt deze parameter gebruiken om dit aan te passen. Verhogen van de waarde van deze parameter zal het uiteindelijke resultaat overdrijven (ziet er meer “heuvelig” uit). De standaard is 1 (geen overdrijving). |
Automatisch klassen voor reliëf genereren |
|
[Booleaanse waarde] Standaard: False |
Als u deze optie selecteert, zal het algoritme automatisch alle klassen voor de reliëfkleuren maken |
Reliëfkleuren Optioneel |
|
[widget tabel] |
Gebruik de widget tabel als u de kleuren handmatig wilt kiezen. U kunt net zoveel klassen voor kleuren toevoegen als u wilt: voor elke klasse kunt u de onder- en bovengrens kiezen en tenslotte, door te klikken op de rij voor de kleur, kunt u de kleur kiezen met de widget Kleur. 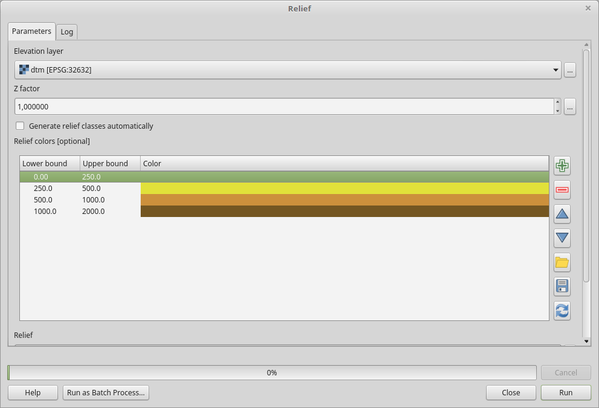
Fig. 24.77 Handmatig reliëf kleurklassen instellen De knoppen in het paneel aan de rechterkant geven u de kans om: kleurklassen toe te voegen of te verwijderen, de volgorde van reeds gedefinieerde kleurklassen te wijzigen, een bestaand bestand met kleurklassen te openen en de huidige klassen als bestand op te slaan. |
Reliëf |
|
[raster] Standaard: |
Specificeer de uitvoer rasterlaag voor het reliëf. Een van:
|
Frequentieverdeling Optioneel |
|
[vector: tabel] Standaard: |
Specificeer de CSV-tabel voor de uitvoer van de frequentieverdeling. Een van:
|
Uitvoer
Label |
Naam |
Type |
Omschrijving |
|---|---|---|---|
Reliëf |
|
[raster] |
De uitvoer rasterlaag voor het reliëf |
Frequentieverdeling |
|
[vector: tabel] |
De uitvoer voor de frequentieverdeling |
Pythoncode
ID algoritme: qgis:relief
import processing
processing.run("algorithm_id", {parameter_dictionary})
Het ID voor het algoritme wordt weergegeven als u over het algoritme gaat met de muisaanwijzer in de Toolbox van Processing. Het woordenboek voor de parameters verschaft de NAME’s en waarden van de parameters. Bekijk Processing algoritmes gebruiken vanaf de console voor details over hoe algoritmes van Processing uit te voeren vanuit de console voor Python.
24.1.20.7. Ruwheidsindex
Berekent de kwantitatieve meting van de heterogeniteit van het terrein, beschreven door Riley et al. (1999). Het wordt berekend voor elke locatie, door de wijziging in hoogte binnen het raster van 3x3-pixel samen te vatten.
Elke pixel bevat het verschil in hoogte vanuit een centrumcel en de 8 cellen daar omheen.
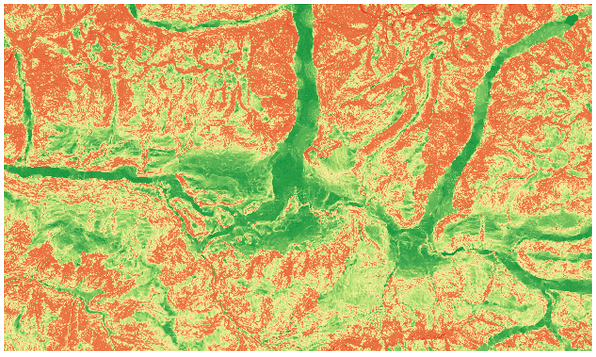
Fig. 24.78 Laag voor ruwheid van lage (rood) tot hoge waarden (groen)
Parameters
Label |
Naam |
Type |
Omschrijving |
|---|---|---|---|
Hoogtelaag |
|
[raster] |
Digital Terrain Model-rasterlaag |
Z-factor |
|
[numeriek: double] Standaard: 1.0 |
Verticale overdrijving. Deze parameter is nuttig als de eenheden voor Z verschillen van die voor X en Y, bijvoorbeeld mijlen en meters. U kunt deze parameter gebruiken om dit aan te passen. Verhogen van de waarde van deze parameter zal het uiteindelijke resultaat overdrijven (laat het er meer ruwer uitzien). De standaard is 1 (geen overdrijving). |
Ruwheid |
|
[raster] Standaard: |
Specificeer de uitvoer rasterlaag voor de ruwheid. Een van:
|
Uitvoer
Label |
Naam |
Type |
Omschrijving |
|---|---|---|---|
Ruwheid |
|
[raster] |
De uitvoer rasterlaag voor de ruwheid |
Pythoncode
ID algoritme: native:ruggednessindex
import processing
processing.run("algorithm_id", {parameter_dictionary})
Het ID voor het algoritme wordt weergegeven als u over het algoritme gaat met de muisaanwijzer in de Toolbox van Processing. Het woordenboek voor de parameters verschaft de NAME’s en waarden van de parameters. Bekijk Processing algoritmes gebruiken vanaf de console voor details over hoe algoritmes van Processing uit te voeren vanuit de console voor Python.
24.1.20.8. Helling
Berekent de helling vanuit een invoer rasterlaag. De helling is de hoek van de helling van het terrein en wordt uitgedrukt in graden.
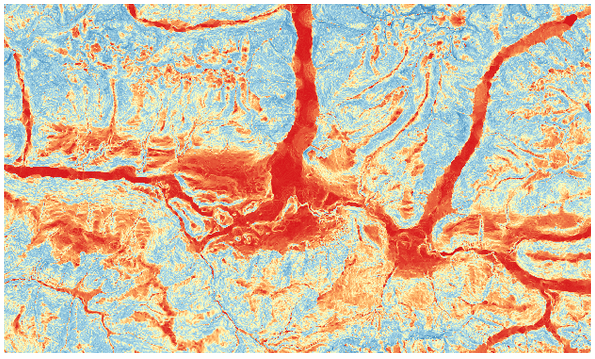
Fig. 24.79 Vlakke gebieden in rood, steile gebieden in blauw
Parameters
Label |
Naam |
Type |
Omschrijving |
|---|---|---|---|
Hoogtelaag |
|
[raster] |
Digital Terrain Model-rasterlaag |
Z-factor |
|
[numeriek: double] Standaard: 1.0 |
Verticale overdrijving. Deze parameter is nuttig als de eenheden voor Z verschillen van die voor X en Y, bijvoorbeeld mijlen en meters. U kunt deze parameter gebruiken om dit aan te passen. Verhogen van de waarde van deze parameter zal het uiteindelijke resultaat overdrijven (maakt het steiler). De standaard is 1 (geen overdrijving). |
Helling |
|
[raster] Standaard: |
Specificeer de uitvoer rasterlaag voor de helling. Een van:
|
Uitvoer
Label |
Naam |
Type |
Omschrijving |
|---|---|---|---|
Helling |
|
[raster] |
De uitvoer rasterlaag voor de helling |
Pythoncode
ID algoritme: native:slope
import processing
processing.run("algorithm_id", {parameter_dictionary})
Het ID voor het algoritme wordt weergegeven als u over het algoritme gaat met de muisaanwijzer in de Toolbox van Processing. Het woordenboek voor de parameters verschaft de NAME’s en waarden van de parameters. Bekijk Processing algoritmes gebruiken vanaf de console voor details over hoe algoritmes van Processing uit te voeren vanuit de console voor Python.