중요
번역은 여러분이 참여할 수 있는 커뮤니티 활동입니다. 이 페이지는 현재 100.00% 번역되었습니다.
28.1.14. 점구름 추출
NEW in 3.32
참고
QGIS가 PDAL 라이브러리 2.5.0 이상 버전을 사용하는 경우에만 이 알고리즘들을 사용할 수 있습니다.
28.1.14.1. 경계
점구름 레이어의 경계를 담고 있는 폴리곤 파일을 추출합니다. 구멍을 담고 있을 수도 있으며 다중 부분 폴리곤일 수도 있습니다.
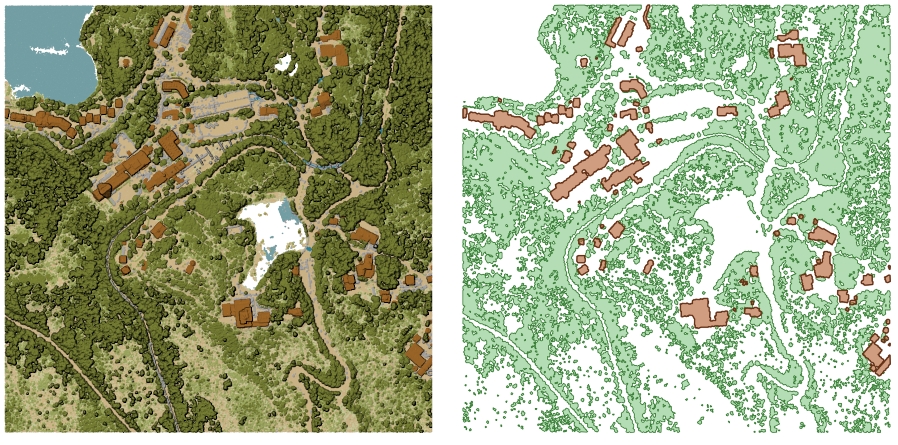
그림 28.16 입력 점구름 레이어에서 상층 식생(high vegetation) 및 건물 폴리곤 추출하기
파라미터
기본 파라미터
라벨 |
이름 |
유형 |
설명 |
|---|---|---|---|
Input layer |
|
[point cloud] |
경계를 계산할 입력 점구름 레이어 |
Resolution of cells used to calculate boundary 선택적 |
|
[number] |
경계를 계산하는 데 사용한 셀의 해상도 |
Minimal number of points in a cell to consider cell occupied 선택적 |
|
[number] |
셀을 차 있다고 간주하려면 필요한 셀 안 포인트의 최소 개수 |
Boundary |
|
[vector: polygon] 기본값: |
산출물로 사용할 점구름 파일을 지정합니다. 다음 가운데 하나로 저장할 수 있습니다:
|
고급 파라미터
라벨 |
이름 |
유형 |
설명 |
|---|---|---|---|
Filter expression 선택적 |
|
[expression] |
점구름 데이터에 있는 피처의 하위 집합을 선택하기 위한 PDAL 표현식 |
Cropping extent 선택적 |
|
[extent] |
점구름 데이터에 있는 피처의 하위 집합을 선택하기 위한 맵 범위 다음과 같은 메소드를 사용할 수 있습니다: |
산출물
라벨 |
이름 |
유형 |
설명 |
|---|---|---|---|
Boundary |
|
[vector: polygon] |
점구름 경계를 가진 산출 폴리곤 벡터 레이어입니다. 현재 |
파이썬 코드
알고리즘 ID: pdal:boundary
import processing
processing.run("algorithm_id", {parameter_dictionary})
공간 처리 툴박스에 있는 알고리즘 위에 마우스를 가져가면 알고리즘 ID 를 표시합니다. 파라미터 목록(dictionary) 은 파라미터 이름 및 값을 제공합니다. 파이썬 콘솔에서 공간 처리 알고리즘을 어떻게 실행하는지 자세히 알고 싶다면 콘솔에서 공간 처리 알고리즘 사용 을 참조하세요.
28.1.14.2. 밀도
각 래스터 셀 내부의 포인트 개수를 바탕으로 한 래스터 파일을 추출합니다. 점구름 데이터셋의 품질을 확인하는 데 유용합니다.
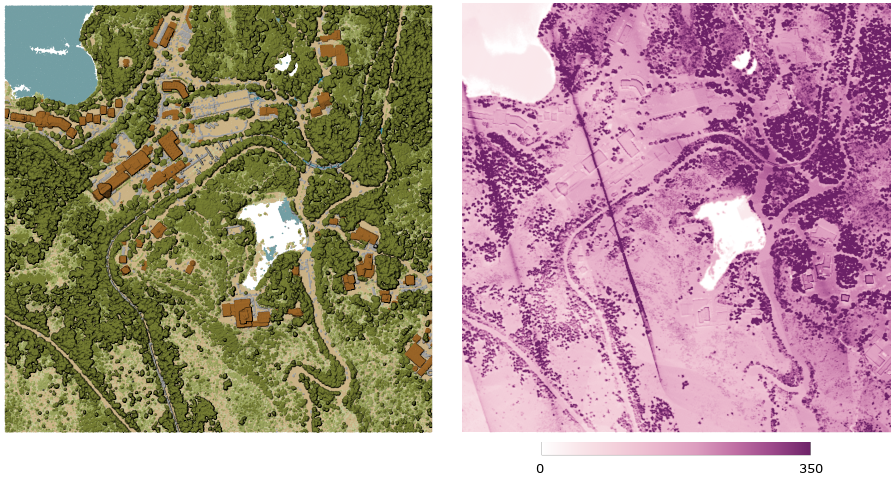
그림 28.17 래스터로써의 포인트 밀도(2x2미터 당 포인트 개수)
파라미터
기본 파라미터
라벨 |
이름 |
유형 |
설명 |
|---|---|---|---|
Input layer |
|
[point cloud] |
내보낼 입력 점구름 레이어입니다. |
Resolution of the density raster |
|
[number] 기본값: 1.0 |
산출 래스터의 셀 크기 |
Tile size for parallel runs |
|
[number] 기본값: 1000 |
병렬 실행을 위해 데이터를 분할시킬 타일의 크기 |
Density |
|
[raster] 기본값: |
데이터를 내보낼 래스터 파일을 지정합니다. 다음 가운데 하나를 선택할 수 있습니다:
|
고급 파라미터
라벨 |
이름 |
유형 |
설명 |
|---|---|---|---|
Filter expression 선택적 |
|
[expression] |
점구름 데이터에 있는 피처의 하위 집합을 선택하기 위한 PDAL 표현식 |
Cropping extent 선택적 |
|
[extent] |
점구름 데이터에 있는 피처의 하위 집합을 선택하기 위한 맵 범위 다음과 같은 메소드를 사용할 수 있습니다: |
X origin of a tile for parallel runs 선택적 |
|
[number] |
|
Y origin of a tile for parallel runs 선택적 |
|
[number] |
산출물
라벨 |
이름 |
유형 |
설명 |
|---|---|---|---|
Density |
|
[raster] |
각 셀 내부의 포인트 개수를 가진 산출 래스터 레이어입니다. 현재 |
파이썬 코드
알고리즘 ID: pdal:density
import processing
processing.run("algorithm_id", {parameter_dictionary})
공간 처리 툴박스에 있는 알고리즘 위에 마우스를 가져가면 알고리즘 ID 를 표시합니다. 파라미터 목록(dictionary) 은 파라미터 이름 및 값을 제공합니다. 파이썬 콘솔에서 공간 처리 알고리즘을 어떻게 실행하는지 자세히 알고 싶다면 콘솔에서 공간 처리 알고리즘 사용 을 참조하세요.
28.1.14.3. 필터
입력 점구름으로부터 PDAL 표현식과 일치하는 그리고/또는 잘라내기(cropping) 직사각형 안에 들어오는 포인트를 추출합니다.
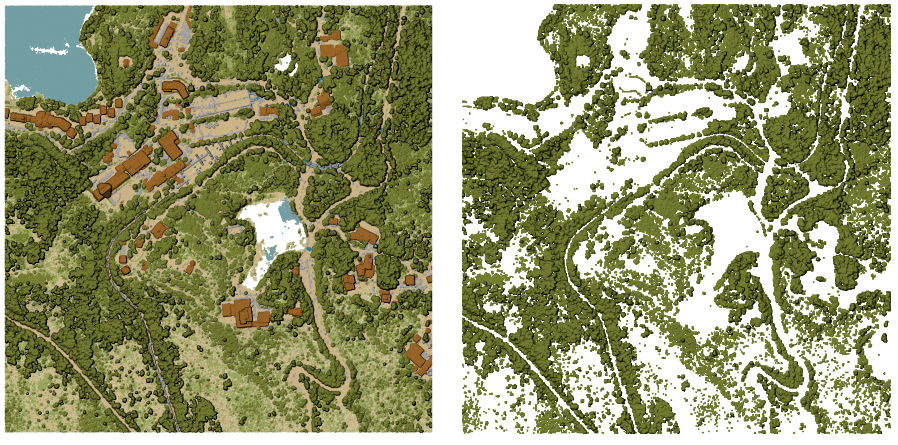
그림 28.18 입력 점구름 레이어에서 상층 식생(high vegetation) 범주로 필터링하기
파라미터
라벨 |
이름 |
유형 |
설명 |
|---|---|---|---|
Input layer |
|
[point cloud] |
내보낼 입력 점구름 레이어입니다. |
Filter expression 선택적 |
|
[expression] |
점구름 데이터에 있는 피처의 하위 집합을 선택하기 위한 PDAL 표현식 |
Cropping extent 선택적 |
|
[extent] |
점구름 데이터에 있는 피처의 하위 집합을 선택하기 위한 맵 범위 다음과 같은 메소드를 사용할 수 있습니다: |
Filtered |
|
[point cloud] 기본값: |
데이터를 추출할 점구름 파일을 지정합니다. 다음 가운데 하나를 선택할 수 있습니다:
|
산출물
라벨 |
이름 |
유형 |
설명 |
|---|---|---|---|
Filtered |
|
[point cloud] |
입력 점구름 레이어에서 필터링한 피처를 가진 산출 점구름 레이어입니다. 현재 |
파이썬 코드
알고리즘 ID: pdal:filter
import processing
processing.run("algorithm_id", {parameter_dictionary})
공간 처리 툴박스에 있는 알고리즘 위에 마우스를 가져가면 알고리즘 ID 를 표시합니다. 파라미터 목록(dictionary) 은 파라미터 이름 및 값을 제공합니다. 파이썬 콘솔에서 공간 처리 알고리즘을 어떻게 실행하는지 자세히 알고 싶다면 콘솔에서 공간 처리 알고리즘 사용 을 참조하세요.