Belangrijk
Vertalen is een inspanning van de gemeenschap waaraan u deel kunt nemen. Deze pagina is momenteel voor 100.00% vertaald.
24.1.16. Gegevensbeheer puntenwolken
Let op
Gebruiken van deze algoritmes vereist dat QGIS is geïnstalleerd met PDAL >= 2.5.0 (bekijk menu ).
24.1.16.1. Projectie toekennen
Toegevoegd in 3.32
Wijst een Coördinaten ReferentieSysteem toe aan een laag met puntenwolk, als die ontbreekt of verkeerd is. Een nieuwe laag wordt gemaakt.
Zie ook
Parameters
Label |
Naam |
Type |
Omschrijving |
|---|---|---|---|
Invoerlaag |
|
[puntenwolk] |
Invoerlaag puntenwolk waaraan een CRS moeten worden toegewezen |
Gewenst CRS |
|
[crs] |
Het CRS dat op de laag moet worden toegepast |
Uitvoerlaag |
|
[puntenwolk] Standaard: |
Specificeer het bestand voor puntenwolk voor de uitvoer. Een van:
|
Uitvoer
Label |
Naam |
Type |
Omschrijving |
|---|---|---|---|
Geconverteerd |
|
[puntenwolk] |
Uitvoerlaag puntenwolk met een nieuw CRS. Momenteel ondersteunde indelingen zijn |
Pythoncode
ID algoritme: pdal:assignprojection
import processing
processing.run("algorithm_id", {parameter_dictionary})
Het ID voor het algoritme wordt weergegeven als u over het algoritme gaat met de muisaanwijzer in de Toolbox van Processing. Het woordenboek voor de parameters verschaft de NAME’s en waarden van de parameters. Bekijk Processing algoritmes gebruiken vanaf de console voor details over hoe algoritmes van Processing uit te voeren vanuit de console voor Python.
24.1.16.2. Virtuele puntenwolk bouwen (VPC)
Toegevoegd in 3.32
Maakt een virtuele puntenwolk (VPC) uit de gegevens van de puntenwolk voor de invoer.
Als u de optionele parameters niet selecteert, zal het bestand VPC heel snel worden gebouwd, omdat het algoritme alleen de metadata van invoerbestanden zal lezen. Met optionele parameters ingesteld zal het algoritme alle punten lezen, wat enige tijd kan duren.
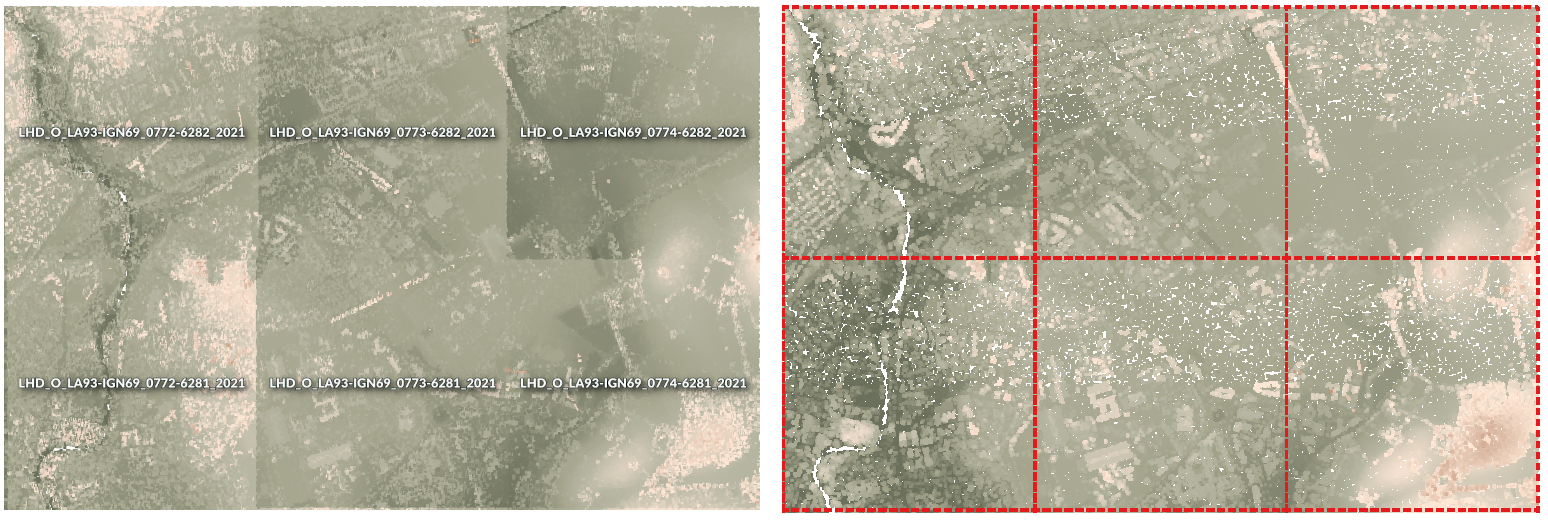
Fig. 24.44 Maken van een Virtuele Puntenwolk (VPC) met overzicht uit een set bestanden voor puntenwolken
Zie ook
Parameters
Label |
Naam |
Type |
Omschrijving |
|---|---|---|---|
Invoerlagen |
|
[puntenwolk] [lijst] |
Invoerlagen puntenwolk om te combineren in een laag virtuele puntenwolk |
Grenzen polygoon berekenen |
|
[Booleaanse waarde] Standaard: False |
Ingesteld op True om de exacte grenzen van de gegevens weer te geven (in plaats van slechts een rechthoekig bereik) |
Statistieken berekenen |
|
[Booleaanse waarde] Standaard: False |
Ingesteld op True om bereiken van waarden van de verscheidene attributen te begrijpen |
Overzicht puntenwolk bouwen |
|
[Booleaanse waarde] Standaard: False |
maakt een enkele “verdunde” puntenwolk uit alle gegevens voor de invoer (gebruikt ongeveer elk 1000-ste punt uit de originele gegevens). D puntenwolk voor het overzicht zal naast het bestand VPC worden gemaakt - bijvoorbeeld: voor |
Virtuele puntenwolk |
|
[puntenwolk] Standaard: |
Specificeer het bestand voor puntenwolk waarin de gegevens moeten worden gebouwd. Een van:
|
Uitvoer
Label |
Naam |
Type |
Omschrijving |
|---|---|---|---|
Virtuele puntenwolk |
|
[raster] |
Uitvoerlaag puntenwolk die alle invoergegevens combineert, als een virtueel bestand. |
Pythoncode
ID algoritme: pdal:virtualpointcloud
import processing
processing.run("algorithm_id", {parameter_dictionary})
Het ID voor het algoritme wordt weergegeven als u over het algoritme gaat met de muisaanwijzer in de Toolbox van Processing. Het woordenboek voor de parameters verschaft de NAME’s en waarden van de parameters. Bekijk Processing algoritmes gebruiken vanaf de console voor details over hoe algoritmes van Processing uit te voeren vanuit de console voor Python.
24.1.16.3. Clippen
Toegevoegd in 3.32
Clipt een laag puntenwolk door een polygoonlaag, zodat de resulterende puntenwolk alleen punten binnen polygonen bevat.
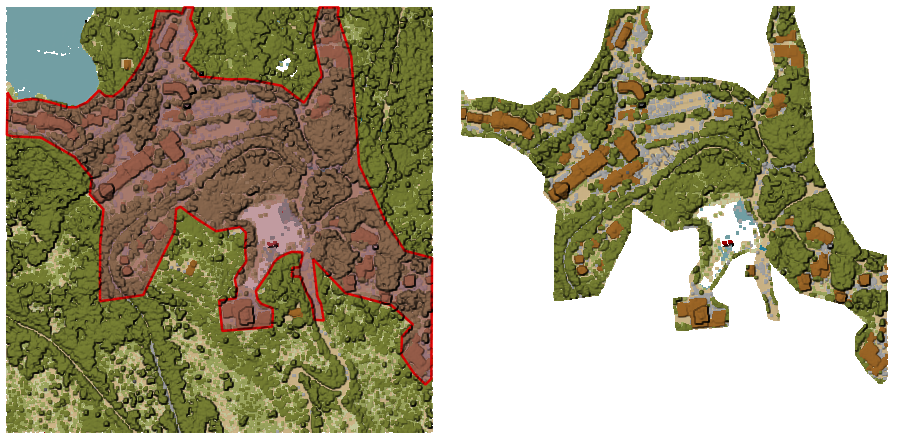
Fig. 24.45 Clippen van invoerlaag puntenwolk door bedekking met een polygoon
Parameters
Basis parameters
Label |
Naam |
Type |
Omschrijving |
|---|---|---|---|
Invoerlaag |
|
[puntenwolk] |
Invoerlaag puntenwolk om te clippen |
Polygonen clippen |
|
[vector: polygoon] |
Polygoon vectorlaag om te gebruiken als bedekking voor clippen van de punten |
Geclipt |
|
[puntenwolk] Standaard: |
Specificeer het bestand voor de puntenwolk waarnaar de geclipte punten moeten worden geëxporteerd. Een van:
|
Gevorderde parameters
Label |
Naam |
Type |
Omschrijving |
|---|---|---|---|
Filter-expressie Optioneel |
|
[expressie] |
Een PDAL-expressie voor het selecteren van een subset met objecten uit de gegevens van de puntenwolk |
Bereik bijsnijden Optioneel |
|
[bereik] |
Een kaartbereik voor het selecteren van een subset met objecten uit de gegevens van de puntenwolk Beschikbare methoden zijn:
|
Uitvoer
Label |
Naam |
Type |
Omschrijving |
|---|---|---|---|
Geclipt |
|
[puntenwolk] |
Uitvoer puntenwolk waarvan de objecten de punten zijn die liggen binnen de bedekking door de polygoonlaag. |
Pythoncode
ID algoritme: pdal:clip
import processing
processing.run("algorithm_id", {parameter_dictionary})
Het ID voor het algoritme wordt weergegeven als u over het algoritme gaat met de muisaanwijzer in de Toolbox van Processing. Het woordenboek voor de parameters verschaft de NAME’s en waarden van de parameters. Bekijk Processing algoritmes gebruiken vanaf de console voor details over hoe algoritmes van Processing uit te voeren vanuit de console voor Python.
24.1.16.4. COPC maken
Toegevoegd in 3.32
Maakt de index voor alle bestanden voor invoer puntenwolken in batch-modus.
Parameters
Label |
Naam |
Type |
Omschrijving |
|---|---|---|---|
Invoerlagen |
|
[puntenwolk] [lijst] |
Invoerlagen puntenwolken waarvoor de index moet worden gemaakt |
Map voor uitvoer Optioneel |
|
[map] Standaard: |
Specificeer de map waarin de nieuwe bestanden moeten worden gemaakt. Een van:
|
Uitvoer
Label |
Naam |
Type |
Omschrijving |
|---|---|---|---|
Map voor uitvoer |
|
[map] |
Map voor uitvoer die de lagen puntenwolken bevat met begeleidende indexbestanden COPC. |
Pythoncode
ID algoritme: pdal:createcopc
import processing
processing.run("algorithm_id", {parameter_dictionary})
Het ID voor het algoritme wordt weergegeven als u over het algoritme gaat met de muisaanwijzer in de Toolbox van Processing. Het woordenboek voor de parameters verschaft de NAME’s en waarden van de parameters. Bekijk Processing algoritmes gebruiken vanaf de console voor details over hoe algoritmes van Processing uit te voeren vanuit de console voor Python.
24.1.16.5. Informatie
Toegevoegd in 3.32
Uitvoeren van basis metadata uit een invoerbestand puntenwolk.
Voorbeeld van uitgevoerde informatie:
LAS 1.4
point format 6
count 56736130
scale 0.001 0.001 0.001
offset 431749.999 5440919.999 968.898
extent 431250 5440420 424.266
432249.999 5441419.999 1513.531
crs ETRS89 / UTM zone 34N (N-E) (EPSG:3046) (vertical CRS missing!)
units horizontal=metre vertical=unknown
Attributes:
- X floating 8
- Y floating 8
- Z floating 8
- Intensity unsigned 2
- ReturnNumber unsigned 1
- NumberOfReturns unsigned 1
- ScanDirectionFlag unsigned 1
- EdgeOfFlightLine unsigned 1
- Classification unsigned 1
- ScanAngleRank floating 4
- UserData unsigned 1
- PointSourceId unsigned 2
- GpsTime floating 8
- ScanChannel unsigned 1
- ClassFlags unsigned 1
Parameters
Label |
Naam |
Type |
Omschrijving |
|---|---|---|---|
Invoerlaag |
|
[puntenwolk] |
Invoerlaag puntenwolk waaruit de informatie van de metadata moet worden genomen |
Laaginformatie |
|
[bestand] Standaard: |
Specificeer het bestand waar de informatie van de metadata moet worden opgeslagen. Een van:
|
Uitvoer
Label |
Naam |
Type |
Omschrijving |
|---|---|---|---|
Laaginformatie |
|
[html] |
bestand |
Pythoncode
ID algoritme: pdal:info
import processing
processing.run("algorithm_id", {parameter_dictionary})
Het ID voor het algoritme wordt weergegeven als u over het algoritme gaat met de muisaanwijzer in de Toolbox van Processing. Het woordenboek voor de parameters verschaft de NAME’s en waarden van de parameters. Bekijk Processing algoritmes gebruiken vanaf de console voor details over hoe algoritmes van Processing uit te voeren vanuit de console voor Python.
24.1.16.6. Samenvoegen
Toegevoegd in 3.32
Voegt meerdere bestanden puntenwolken samen tot een enkel bestand.
Zie ook
Parameters
Basis parameters
Label |
Naam |
Type |
Omschrijving |
|---|---|---|---|
Invoerlagen |
|
[puntenwolk] [lijst] |
Invoerlagen puntenwolken die moeten worden samengevoegd tot een enkel bestand |
Samengevoegd |
|
[puntenwolk] Standaard: |
Specificeer het bestand voor puntenwolk voor de uitvoer waarin de invoerbestanden zijn samengevoegd. Een van:
|
Gevorderde parameters
Label |
Naam |
Type |
Omschrijving |
|---|---|---|---|
Filter-expressie Optioneel |
|
[expressie] |
Een PDAL-expressie voor het selecteren van een subset met objecten uit de gegevens van de puntenwolk |
Bereik bijsnijden Optioneel |
|
[bereik] |
Een kaartbereik voor het selecteren van een subset met objecten uit de gegevens van de puntenwolk Beschikbare methoden zijn:
|
Uitvoer
Label |
Naam |
Type |
Omschrijving |
|---|---|---|---|
Samengevoegd |
|
[puntenwolk] |
Uitvoerlaag puntenwolk met alle samengevoegde invoerbestanden. |
Pythoncode
ID algoritme: pdal:merge
import processing
processing.run("algorithm_id", {parameter_dictionary})
Het ID voor het algoritme wordt weergegeven als u over het algoritme gaat met de muisaanwijzer in de Toolbox van Processing. Het woordenboek voor de parameters verschaft de NAME’s en waarden van de parameters. Bekijk Processing algoritmes gebruiken vanaf de console voor details over hoe algoritmes van Processing uit te voeren vanuit de console voor Python.
24.1.16.7. Opnieuw projecteren
Toegevoegd in 3.32
Projecteert een puntenwolk opnieuw naar een ander Coördinaten ReferentieSysteem (CRS).
Zie ook
Parameters
Label |
Naam |
Type |
Omschrijving |
|---|---|---|---|
Invoerlaag |
|
[puntenwolk] |
Invoerlaag puntenwolk die opnieuw moet worden geprojecteerd naar een ander CRS |
Doel-CRS |
|
[crs] |
Het CRS dat op de laag moet worden toegepast |
Opnieuw geprojecteerd |
|
[puntenwolk] Standaard: |
Specificeer het opnieuw geprojecteerde bestand voor puntenwolk. Een van:
|
Gevorderde parameters
Label |
Naam |
Type |
Omschrijving |
|---|---|---|---|
Coördinaten bewerken Optioneel |
|
[datum] |
De te gebruiken datumtransformatie om de gegevens opnieuw te projecteren tussen het originele en het doelsysteem. |
Uitvoer
Label |
Naam |
Type |
Omschrijving |
|---|---|---|---|
OPNIEUW GEPROJECTEERD |
|
[puntenwolk] |
Uitvoerlaag puntenwolk in het doel-CRS. |
Pythoncode
ID algoritme: pdal:reproject
import processing
processing.run("algorithm_id", {parameter_dictionary})
Het ID voor het algoritme wordt weergegeven als u over het algoritme gaat met de muisaanwijzer in de Toolbox van Processing. Het woordenboek voor de parameters verschaft de NAME’s en waarden van de parameters. Bekijk Processing algoritmes gebruiken vanaf de console voor details over hoe algoritmes van Processing uit te voeren vanuit de console voor Python.
24.1.16.8. Verdunnen (door straal te monsteren)
Toegevoegd in 3.32
Maakt een verdunde versie van de puntenwolk door monsters te nemen op afstand van punten (reduceert het aantal punten binnen een bepaalde straal).

Fig. 24.46 Verdunde puntenwolk (door straal te monsteren)
Parameters
Basis parameters
Label |
Naam |
Type |
Omschrijving |
|---|---|---|---|
Invoerlaag |
|
[puntenwolk] |
Invoerlaag puntenwolk waarvan een verdunde versie moet worden gemaakt |
Straal voor nemen monsters (in kaarteenheden) |
|
[numeriek: double] Standaard: 1.0 |
Afstand waarbinnen de punten worden gemonsterd tot een uniek punt |
Verdund (op straal) |
|
[puntenwolk] Standaard: |
Specificeer het bestand voor puntenwolk voor de uitvoer met verminderde punten. Een van:
|
Gevorderde parameters
Label |
Naam |
Type |
Omschrijving |
|---|---|---|---|
Filter-expressie Optioneel |
|
[expressie] |
Een PDAL-expressie voor het selecteren van een subset met objecten uit de gegevens van de puntenwolk |
Bereik bijsnijden Optioneel |
|
[bereik] |
Een kaartbereik voor het selecteren van een subset met objecten uit de gegevens van de puntenwolk Beschikbare methoden zijn:
|
Uitvoer
Label |
Naam |
Type |
Omschrijving |
|---|---|---|---|
Verdund (op straal) |
|
[puntenwolk] |
Uitvoerlaag puntenwolk met gereduceerde punten. |
Pythoncode
ID algoritme: pdal:thinbyradius
import processing
processing.run("algorithm_id", {parameter_dictionary})
Het ID voor het algoritme wordt weergegeven als u over het algoritme gaat met de muisaanwijzer in de Toolbox van Processing. Het woordenboek voor de parameters verschaft de NAME’s en waarden van de parameters. Bekijk Processing algoritmes gebruiken vanaf de console voor details over hoe algoritmes van Processing uit te voeren vanuit de console voor Python.
24.1.16.9. Verdunnen (door punten over te slaan)
Toegevoegd in 3.32
Maakt een verdunde versie van de puntenwolk door alleen elk N-de punt te behouden (reduceert het aantal punten door nabijgelegen punten over te slaan).
Parameters
Basis parameters
Label |
Naam |
Type |
Omschrijving |
|---|---|---|---|
Invoerlaag |
|
[puntenwolk] |
Invoerlaag puntenwolk waarvan een verdunde versie moet worden gemaakt |
Aantal punten dat moet worden overgeslagen |
|
[numeriek: integer] Standaard: 1 |
Behoud alleen elk N-de punt in de invoerlaag |
Vedund (door decimeren) |
|
[puntenwolk] Standaard: |
Specificeer het bestand voor puntenwolk voor de uitvoer met verminderde punten. Een van:
|
Gevorderde parameters
Label |
Naam |
Type |
Omschrijving |
|---|---|---|---|
Filter-expressie Optioneel |
|
[expressie] |
Een PDAL-expressie voor het selecteren van een subset met objecten uit de gegevens van de puntenwolk |
Bereik bijsnijden Optioneel |
|
[bereik] |
Een kaartbereik voor het selecteren van een subset met objecten uit de gegevens van de puntenwolk Beschikbare methoden zijn:
|
Uitvoer
Label |
Naam |
Type |
Omschrijving |
|---|---|---|---|
Vedund (door decimeren) |
|
[puntenwolk] |
Uitvoerlaag puntenwolk met gereduceerde punten. |
Pythoncode
ID algoritme: pdal:thinbydecimate
import processing
processing.run("algorithm_id", {parameter_dictionary})
Het ID voor het algoritme wordt weergegeven als u over het algoritme gaat met de muisaanwijzer in de Toolbox van Processing. Het woordenboek voor de parameters verschaft de NAME’s en waarden van de parameters. Bekijk Processing algoritmes gebruiken vanaf de console voor details over hoe algoritmes van Processing uit te voeren vanuit de console voor Python.
24.1.16.10. Tegel
Maakt tegels uit bestanden voor invoer puntenwolk, aanbevolen voor beste uitvoering (in weergave of analyse) met zulke gegevenssets in QGIS.
Parameters
Basis parameters
Label |
Naam |
Type |
Omschrijving |
|---|---|---|---|
Invoerlagen |
|
[puntenwolk] [lijst] |
Invoerlagen puntenwolken waarvan de tegels moeten worden gemaakt |
Lengte tegel |
|
[numeriek: double] Standaard: 1000.0 |
Grootte van de rand van elke gemaakte tegel |
Map voor uitvoer |
|
[map] Standaard: |
Specificeer de map waarin de gemaakte tegels moeten worden opgeslagen. Een van:
|
Gevorderde parameters
Label |
Naam |
Type |
Omschrijving |
|---|---|---|---|
CRS toewijzen Optioneel |
|
[crs] |
Het CRS dat op de laag moet worden toegepast |
Uitvoer
Label |
Naam |
Type |
Omschrijving |
|---|---|---|---|
Map voor uitvoer |
|
[map] |
Map voor de uitvoer die de uit de invoerbestanden gemaakte tegels bevat. |
Pythoncode
ID algoritme: pdal:tile
import processing
processing.run("algorithm_id", {parameter_dictionary})
Het ID voor het algoritme wordt weergegeven als u over het algoritme gaat met de muisaanwijzer in de Toolbox van Processing. Het woordenboek voor de parameters verschaft de NAME’s en waarden van de parameters. Bekijk Processing algoritmes gebruiken vanaf de console voor details over hoe algoritmes van Processing uit te voeren vanuit de console voor Python.