Svarbu
Vertimas yra bendruomenės pastangos, prie kurių jūs galite prisijungti. Šis puslapis šiuo metu išverstas 92.59%.
24.1.15. Taškų masyvo keitimas
Dėmesio
Running these algorithms requires QGIS installed with PDAL >= 2.5.0 (see menu).
24.1.15.1. Keisti formatą
Added in 3.32
Keičia taškų debesį į kitą failo formatą, pavyzdžiui sukuria suspaustą .LAZ.
Parametrai
Užrašas |
Pavadinimas |
Tipas |
Aprašymas |
|---|---|---|---|
Įvesties sluoksnis |
|
[taškų masyvas] |
Įvesties taškų masyvo sluoksnis, kurį reikia keisti |
Pakeistas |
|
[taškų masyvas] Numatytas: |
Nurodykite taškų masyvo failą, kurį naudoti kaip išvestį. Vienas iš:
|
Išvestys
Užrašas |
Pavadinimas |
Tipas |
Aprašymas |
|---|---|---|---|
Pakeistas |
|
[taškų masyvas] |
Išvesties taškų masyvo sluoksnis pakeistu failo formatu. Šiuo metu palaikomi formatai yra |
Pythono kodas
Algoritmo ID: pdal:convertformat
import processing
processing.run("algorithm_id", {parameter_dictionary})
algoritmo id rodomas, kai užvedate pelę virš algoritmo apdorojimo įrankinėje. parametrų žodynas teikia parametrų pavadinimus ir reikšmes. Daugiau informacijos apie tai, kaip vykdyti apdorojimo algoritmus Pythono konsolėje rasite skyriuje Using processing algorithms from the console.
24.1.15.2. Eksportuoti į rastrą
Added in 3.32
Eksportuoja taškų masyvo duomenis į 2D rastro gardelę su nurodytos rezoliucijos celės dydžiu, įrašant reikšmes iš nurodyto atributo.
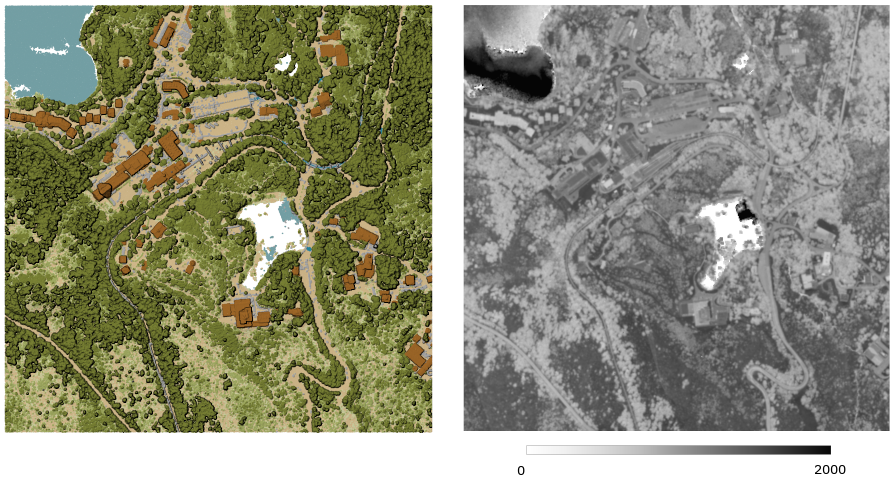
Fig. 24.41 Rastro išvestis naudojant taškų intensyvumo atributą
Parametrai
Baziniai parametrai
Užrašas |
Pavadinimas |
Tipas |
Aprašymas |
|---|---|---|---|
Įvesties sluoksnis |
|
[taškų masyvas] |
Įvesties taškų masyvo sluoksnis eksportavimui |
Atributas |
|
[laukas] [sąrašas] |
Taškų masyvo sluoksnio laukas, iš kurio reikia ištraukti reikšmes |
Tankio rastro rezoliucija |
|
[skaičius: slankaus kablelio] Numatytas: 1.0 |
Išvesties rastro celės dydis |
Paralelinio vykdymo kaladėlės dydis |
|
[skaičius: sveikas skaičius] Numatytas: 1000 |
|
Eksportuota |
|
[rastras] Numatytas: |
Nurodykite rastro failą, į kurį eksportuoti duomenis. Vienas iš:
|
Išmanesni parametrai
Užrašas |
Pavadinimas |
Tipas |
Aprašymas |
|---|---|---|---|
Filtro išraiška Pasirinktinis |
|
[išraiška] |
PDAL išraiška parenkant taškų masyvo duomenų geoobjektų poaibį |
Apkarpymo apimtis Pasirinktinis |
|
[apimtis] |
Žemėlapio apimtis, parenkant taškų masyvo duomenų geoobjektų poaibį Galimi metodai yra:
|
Paralelinio vykdymo kaladėlių X pradžia Pasirinktinis |
|
[skaičius: slankaus kablelio] |
|
Paralelinio vykdymo kaladėlių Y pradžia Pasirinktinis |
|
[skaičius: slankaus kablelio] |
Išvestys
Užrašas |
Pavadinimas |
Tipas |
Aprašymas |
|---|---|---|---|
Eksportuota |
|
[rastras] |
Išvesties rastro sluoksnio geoobjektai eksportuoti iš taškų masyvo sluoksnio. Šiuo metu palaikomas formatas yra |
Pythono kodas
Algoritmo ID: pdal:exportraster
import processing
processing.run("algorithm_id", {parameter_dictionary})
algoritmo id rodomas, kai užvedate pelę virš algoritmo apdorojimo įrankinėje. parametrų žodynas teikia parametrų pavadinimus ir reikšmes. Daugiau informacijos apie tai, kaip vykdyti apdorojimo algoritmus Pythono konsolėje rasite skyriuje Using processing algorithms from the console.
24.1.15.3. Export to raster (using triangulation)
Added in 3.32
Eksportuoja taškų masyvo duomenis į 2D rastrą naudojant taškų trianguliaciją ir tada interpoliuojant celių reikšmes iš trikampių.
Pastaba
Šis algoritmas gali būti lėtas, jei dirbate su dideliu duomenų rinkiniu. Jei jūsų taškų masyvas yra tankus, jūs galite eksportuoti žemės taškus kaip rastrą, naudodami algoritmą Eksportuoti į rastrą.
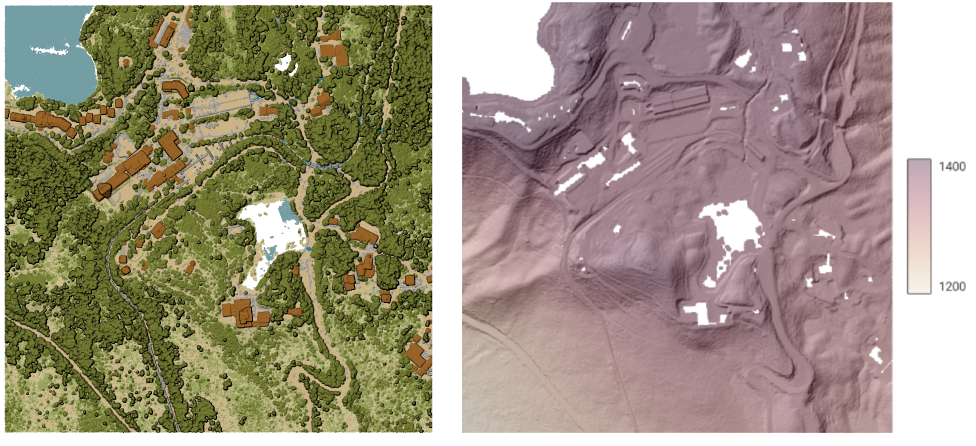
Fig. 24.42 Paviršiaus rastro išvestis, sukurta naudojant taškų masyvo trianguliaciją
Parametrai
Baziniai parametrai
Užrašas |
Pavadinimas |
Tipas |
Aprašymas |
|---|---|---|---|
Įvesties sluoksnis |
|
[taškų masyvas] |
Įvesties taškų masyvo sluoksnis eksportavimui |
Tankio rastro rezoliucija |
|
[skaičius: slankaus kablelio] Numatytas: 1.0 |
Išvesties rastro celės dydis |
Paralelinio vykdymo kaladėlės dydis |
|
[skaičius: sveikas skaičius] Numatytas: 1000 |
|
Eksportuota |
|
[rastras] Numatytas: |
Nurodykite rastro failą, į kurį eksportuoti duomenis. Vienas iš:
|
Išmanesni parametrai
Užrašas |
Pavadinimas |
Tipas |
Aprašymas |
|---|---|---|---|
Filtro išraiška Pasirinktinis |
|
[išraiška] |
PDAL išraiška parenkant taškų masyvo duomenų geoobjektų poaibį |
Apkarpymo apimtis Pasirinktinis |
|
[apimtis] |
Žemėlapio apimtis, parenkant taškų masyvo duomenų geoobjektų poaibį Galimi metodai yra:
|
Paralelinio vykdymo kaladėlių X pradžia Pasirinktinis |
|
[skaičius: slankaus kablelio] |
|
Paralelinio vykdymo kaladėlių Y pradžia Pasirinktinis |
|
[skaičius: slankaus kablelio] |
Išvestys
Užrašas |
Pavadinimas |
Tipas |
Aprašymas |
|---|---|---|---|
Eksportuotas (naudojant trianguliaciją) |
|
[rastras] |
Išvesties rastro sluoksnio geoobjektai eksportuoti iš taškų masyvo sluoksnio. Šiuo metu palaikomas formatas yra |
Pythono kodas
Algoritmo ID: pdal:exportrastertin
import processing
processing.run("algorithm_id", {parameter_dictionary})
algoritmo id rodomas, kai užvedate pelę virš algoritmo apdorojimo įrankinėje. parametrų žodynas teikia parametrų pavadinimus ir reikšmes. Daugiau informacijos apie tai, kaip vykdyti apdorojimo algoritmus Pythono konsolėje rasite skyriuje Using processing algorithms from the console.
24.1.15.4. Export to vector
Added in 3.32
Exports point cloud data to a vector layer with 3D points (a GeoPackage), optionally with extra attributes.
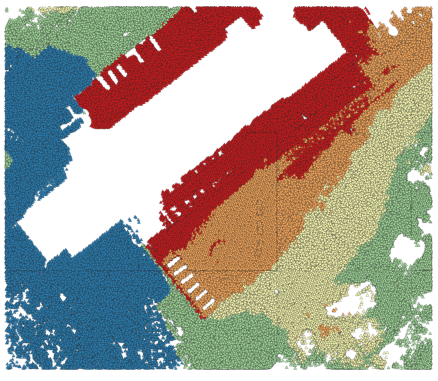
Fig. 24.43 Exporting point cloud (ground points) to a vector layer styled based on the elevation
Parametrai
Baziniai parametrai
Užrašas |
Pavadinimas |
Tipas |
Aprašymas |
|---|---|---|---|
Įvesties sluoksnis |
|
[taškų masyvas] |
Įvesties taškų masyvo sluoksnis eksportavimui |
Atributas Pasirinktinis |
|
[field] [list] |
One or more fields of the point cloud layer to export with the points. |
Eksportuota |
|
[vector] Numatytas: |
Specify the vector file to export the data to. One of:
|
Išmanesni parametrai
Užrašas |
Pavadinimas |
Tipas |
Aprašymas |
|---|---|---|---|
Filtro išraiška Pasirinktinis |
|
[išraiška] |
PDAL išraiška parenkant taškų masyvo duomenų geoobjektų poaibį |
Apkarpymo apimtis Pasirinktinis |
|
[apimtis] |
Žemėlapio apimtis, parenkant taškų masyvo duomenų geoobjektų poaibį Galimi metodai yra:
|
Išvestys
Užrašas |
Pavadinimas |
Tipas |
Aprašymas |
|---|---|---|---|
Eksportuota |
|
[vector] |
Output vector layer features of the point cloud layer are exported to.
Currently supported format is |
Pythono kodas
Algorithm ID: pdal:exportvector
import processing
processing.run("algorithm_id", {parameter_dictionary})
algoritmo id rodomas, kai užvedate pelę virš algoritmo apdorojimo įrankinėje. parametrų žodynas teikia parametrų pavadinimus ir reikšmes. Daugiau informacijos apie tai, kaip vykdyti apdorojimo algoritmus Pythono konsolėje rasite skyriuje Using processing algorithms from the console.