Důležité
Translation is a community effort you can join. This page is currently translated at 39.09%.
24.1.15. Point Cloud Conversion
Výstraha
Running these algorithms requires QGIS installed with PDAL >= 2.5.0 (see menu).
24.1.15.1. Convert format
Added in 3.32
Converts a point cloud to a different file format, e.g. creates a compressed .LAZ.
Parameters
Label |
Název |
Druh |
Popis |
|---|---|---|---|
Input layer |
|
[point cloud] |
Input point cloud layer to convert |
Converted |
|
[point cloud] Default: |
Specify the point cloud file to use as output. One of:
|
Outputs
Label |
Název |
Druh |
Popis |
|---|---|---|---|
Converted |
|
[point cloud] |
Output point cloud layer in a modified file format.
Currently supported formats are |
Python kód
Algorithm ID: pdal:convertformat
import processing
processing.run("algorithm_id", {parameter_dictionary})
The algorithm id is displayed when you hover over the algorithm in the Processing Toolbox. The parameter dictionary provides the parameter NAMEs and values. See Using processing algorithms from the console for details on how to run processing algorithms from the Python console.
24.1.15.2. Export to raster
Added in 3.32
Exports point cloud data to a 2D raster grid having cell size of given resolution, writing values from the specified attribute.
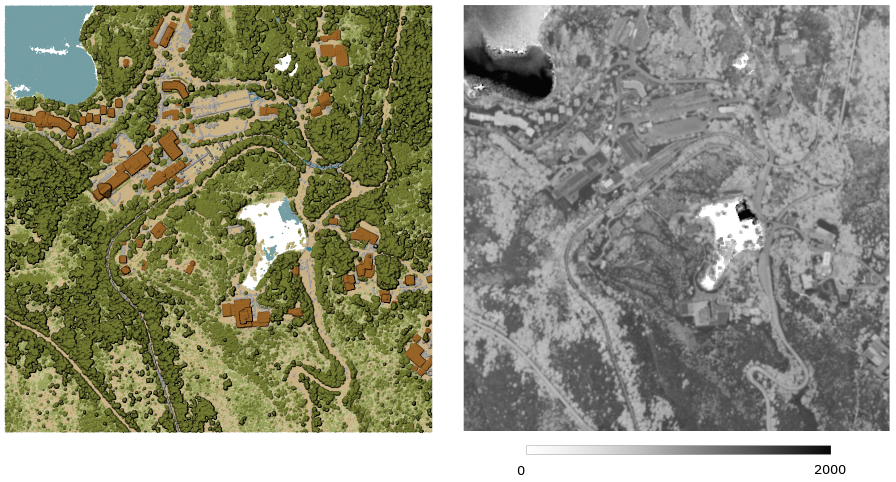
Obr. 24.41 Raster output using Intensity attribute of points
Parameters
Basic parameters
Label |
Název |
Druh |
Popis |
|---|---|---|---|
Input layer |
|
[point cloud] |
Input point cloud layer to export |
Attribute |
|
[field] [enumeration] |
A Field of the point cloud layer to extract the values from |
Resolution of the density raster |
|
[numeric: double] Default: 1.0 |
Cell size of the output raster |
Tile size for parallel runs |
|
[numeric: integer] Default: 1000 |
|
Exported |
|
[raster] Default: |
Specify the raster file to export the data to. One of:
|
Pokročilé parametry
Label |
Název |
Druh |
Popis |
|---|---|---|---|
Filter expression Volitelné |
|
[expression] |
A PDAL expression for selecting a subset of features in the point cloud data |
Cropping extent Volitelné |
|
[extent] |
A map extent for selecting a subset of features in the point cloud data Dostupné metody jsou:
|
X origin of a tile for parallel runs Volitelné |
|
[numeric: double] |
|
Y origin of a tile for parallel runs Volitelné |
|
[numeric: double] |
Outputs
Label |
Název |
Druh |
Popis |
|---|---|---|---|
Exported |
|
[raster] |
Output raster layer features of the point cloud layer are exported to.
Currently supported format is |
Python kód
Algorithm ID: pdal:exportraster
import processing
processing.run("algorithm_id", {parameter_dictionary})
The algorithm id is displayed when you hover over the algorithm in the Processing Toolbox. The parameter dictionary provides the parameter NAMEs and values. See Using processing algorithms from the console for details on how to run processing algorithms from the Python console.
24.1.15.3. Export to raster (using triangulation)
Added in 3.32
Exports point cloud data to a 2D raster grid using a triangulation of points and then interpolating cell values from triangles.
Poznámka
Using this algorithm can be slower if you are dealing with a large dataset. If your point cloud is dense, you can export your ground points as a raster using the Export to raster algorithm.
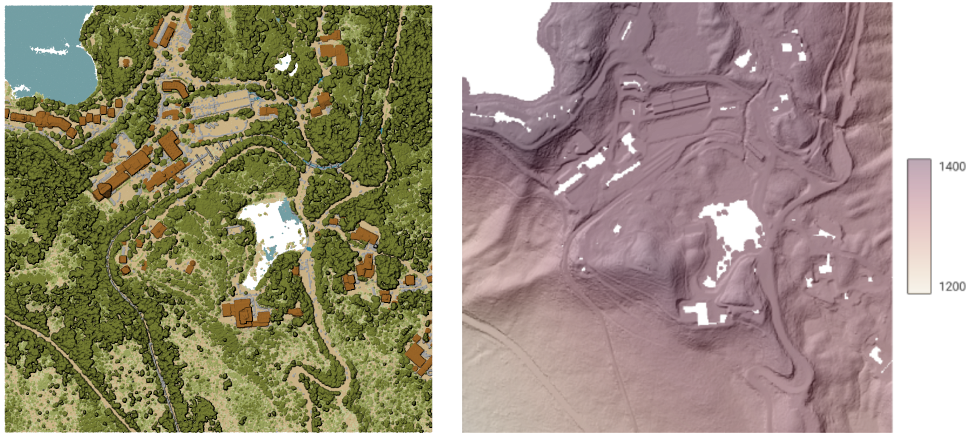
Obr. 24.42 Terrain raster output generated by point cloud triangulation
Parameters
Basic parameters
Label |
Název |
Druh |
Popis |
|---|---|---|---|
Input layer |
|
[point cloud] |
Input point cloud layer to export |
Resolution of the density raster |
|
[numeric: double] Default: 1.0 |
Cell size of the output raster |
Tile size for parallel runs |
|
[numeric: integer] Default: 1000 |
|
Exported |
|
[raster] Default: |
Specify the raster file to export the data to. One of:
|
Pokročilé parametry
Label |
Název |
Druh |
Popis |
|---|---|---|---|
Filter expression Volitelné |
|
[expression] |
A PDAL expression for selecting a subset of features in the point cloud data |
Cropping extent Volitelné |
|
[extent] |
A map extent for selecting a subset of features in the point cloud data Dostupné metody jsou:
|
X origin of a tile for parallel runs Volitelné |
|
[numeric: double] |
|
Y origin of a tile for parallel runs Volitelné |
|
[numeric: double] |
Outputs
Label |
Název |
Druh |
Popis |
|---|---|---|---|
Exported (using triangulation) |
|
[raster] |
Output raster layer features of the point cloud layer are exported to.
Currently supported format is |
Python kód
Algorithm ID: pdal:exportrastertin
import processing
processing.run("algorithm_id", {parameter_dictionary})
The algorithm id is displayed when you hover over the algorithm in the Processing Toolbox. The parameter dictionary provides the parameter NAMEs and values. See Using processing algorithms from the console for details on how to run processing algorithms from the Python console.
24.1.15.4. Export to vector
Added in 3.32
Exports point cloud data to a vector layer with 3D points (a GeoPackage), optionally with extra attributes.
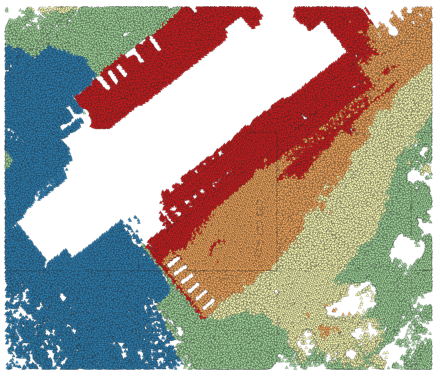
Obr. 24.43 Exporting point cloud (ground points) to a vector layer styled based on the elevation
Parameters
Basic parameters
Label |
Název |
Druh |
Popis |
|---|---|---|---|
Input layer |
|
[point cloud] |
Input point cloud layer to export |
Attribute Volitelné |
|
[field] [list] |
One or more fields of the point cloud layer to export with the points. |
Exported |
|
[vector] Default: |
Specify the vector file to export the data to. One of:
|
Pokročilé parametry
Label |
Název |
Druh |
Popis |
|---|---|---|---|
Filter expression Volitelné |
|
[expression] |
A PDAL expression for selecting a subset of features in the point cloud data |
Cropping extent Volitelné |
|
[extent] |
A map extent for selecting a subset of features in the point cloud data Dostupné metody jsou:
|
Outputs
Label |
Název |
Druh |
Popis |
|---|---|---|---|
Exported |
|
[vector] |
Output vector layer features of the point cloud layer are exported to.
Currently supported format is |
Python kód
Algorithm ID: pdal:exportvector
import processing
processing.run("algorithm_id", {parameter_dictionary})
The algorithm id is displayed when you hover over the algorithm in the Processing Toolbox. The parameter dictionary provides the parameter NAMEs and values. See Using processing algorithms from the console for details on how to run processing algorithms from the Python console.