Viktigt
Översättning är en gemenskapsinsats du kan gå med i. Den här sidan är för närvarande översatt till 100.00%.
16. Arbeta med punktmoln
16.1. Introduktion till punktmoln
Vad är ett punktmoln?
Ett punktmoln är en tredimensionell bild av ett utrymme som består av många enskilda datapunkter (upp till miljarder, till och med biljoner). Var och en av punkterna har en x-, y- och z-koordinat. Beroende på insamlingsmetod har punktmoln vanligtvis också ytterligare attribut som kommer från insamlingen, t.ex. färgvärden eller intensitet. Dessa attribut kan t.ex. användas för att visa punktmoln i olika färger. I QGIS kan ett punktmoln användas för att generera en tredimensionell bild av landskapet (eller av ett annat utrymme).
Format som stöds
QGIS stöder dataformaten Entwine Point Tile (EPT) och LAS/LAZ. För att arbeta med punktmoln sparar QGIS alltid data i EPT. EPT är ett lagringsformat som består av flera filer som lagras i en gemensam mapp. För att ge snabb åtkomst till data använder EPT indexering. För mer information om EPT-formatet, se entwine homepage
Om data är i LAS- eller LAZ-format kommer QGIS att konvertera dem till EPT när de laddas för första gången. Beroende på filens storlek kan detta ta en viss tid. I den här processen skapas en undermapp i den mapp där LAS/LAZ-filen finns enligt schemat ept_ + name_LAS/LAZ_file. Om en sådan undermapp redan finns laddar QGIS EPT:n omedelbart (vilket leder till en kortare laddningstid).
Värd att känna till
I QGIS är det (ännu) inte möjligt att redigera punktmoln. Om du vill manipulera ditt punktmoln kan du använda CloudCompare, ett bearbetningsverktyg för punktmoln med öppen källkod. Även Point Data Abstraction Library (PDAL - liknar GDAL) ger dig alternativ för att redigera punktmoln (PDAL är endast kommandorad).
På grund av det stora antalet datapunkter är det inte möjligt att visa en attributtabell för punktmoln i QGIS. Verktyget  Identify tool stöder dock punktmoln, så du kan visa alla attribut, även för en enda datapunkt.
Identify tool stöder dock punktmoln, så du kan visa alla attribut, även för en enda datapunkt.
Om du vill skapa ett nytt lager, i samma eller ett annat format som stöds, från ett befintligt punktmolnslager, se Skapa nya lager från ett befintligt lager.
16.2. Punktmoln Egenskaper
Dialogrutan Lageregenskaper för ett punktmolnslager ger allmänna inställningar för lagret och dess rendering. Den innehåller också information om lagret.
För att komma till dialogrutan Lageregenskaper:
Dubbelklicka på lagret i panelen Layers eller högerklicka och välj Properties… från snabbmenyn;
Gå till menyn när lagret är markerat.
Dialogrutan för punktmoln Lageregenskaper innehåller följande avsnitt:
|
||
|
|
|

[1] Finns även i Layer stylingpanel
Observera
De flesta av egenskaperna för ett punktmolnslager kan sparas till eller laddas från en .qml-fil med hjälp av Style-menyn längst ned i dialogrutan för egenskaper. Mer information finns på Spara och dela egenskaper för lager
16.2.1. Informationsegenskaper
Fliken  Information är skrivskyddad och utgör en intressant plats för att snabbt hämta sammanfattad information och metadata om det aktuella lagret. Tillhandahållen information är:
Information är skrivskyddad och utgör en intressant plats för att snabbt hämta sammanfattad information och metadata om det aktuella lagret. Tillhandahållen information är:
Allmänna uppgifter som namn i projektet, sökväg till källan, senaste spartid och storlek, använd leverantör
anpassade egenskaper som används för att lagra ytterligare information om lagret i det aktiva projektet. Standardanpassade egenskaper kan inkludera layer notes. Fler egenskaper kan skapas och hanteras med hjälp av PyQGIS, särskilt genom metoden setCustomProperty().
Baserat på lagrets leverantör: omfattning och antal punkter
Koordinatreferenssystemet: namn, enheter, metod, noggrannhet, referens (dvs. om det är statiskt eller dynamiskt)
Metadata som levereras av leverantören: skapandedatum, version, dataformat, skala X/Y/Z, …
Väljs från fliken
 Metadata (där de kan redigeras): access, extents, länkar, kontakter, historik…
Metadata (där de kan redigeras): access, extents, länkar, kontakter, historik…
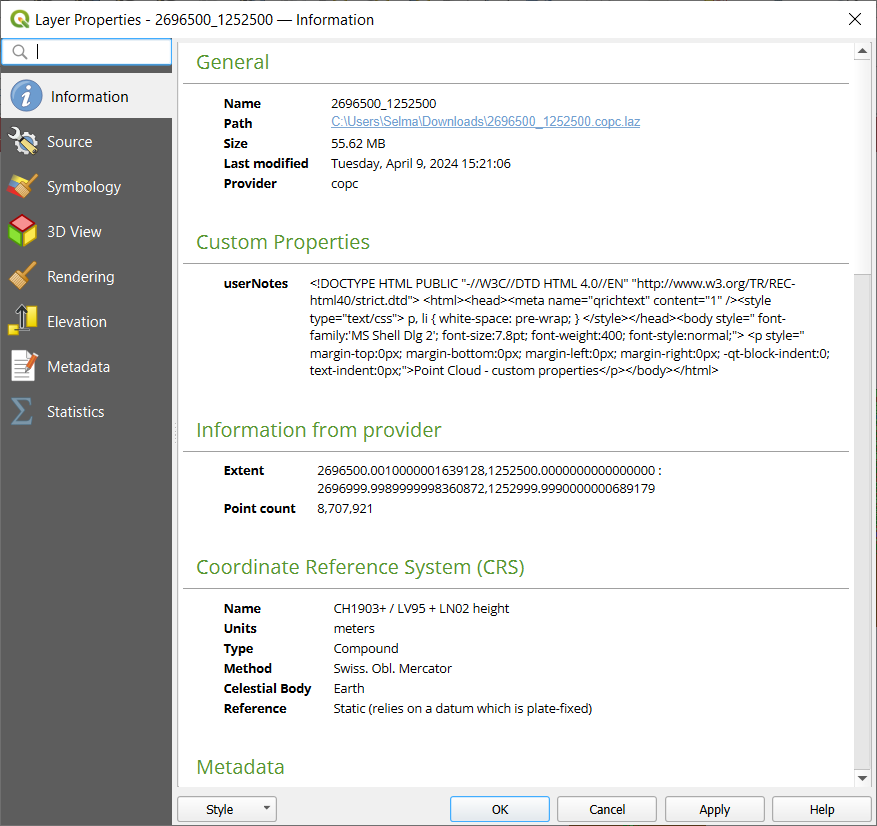
Fig. 16.1 Fliken Information om punktmoln
16.2.2. Källegenskaper
På fliken  Source kan du se och redigera grundläggande information om punktmolnslagret:
Source kan du se och redigera grundläggande information om punktmolnslagret:
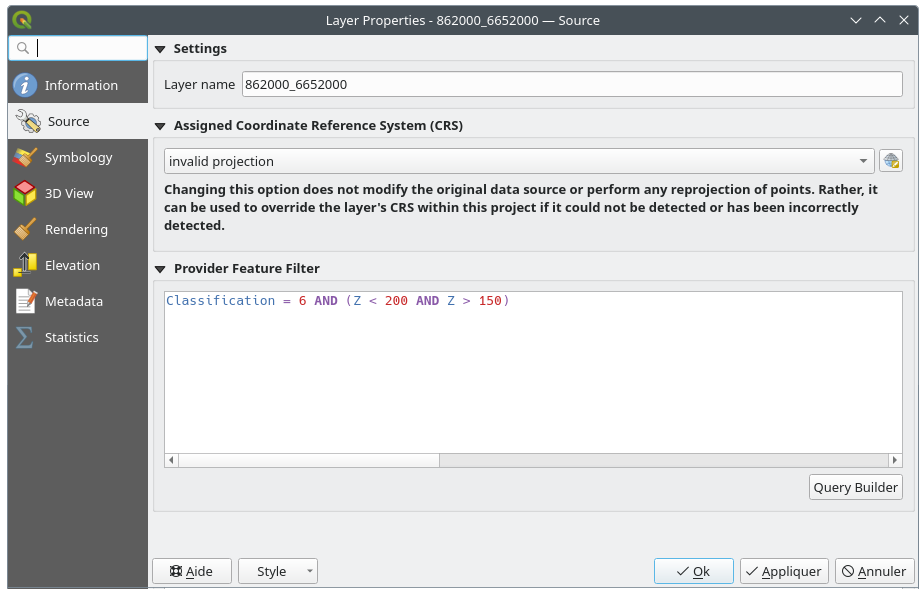
Fig. 16.2 Fliken Punktmolnskälla
Inställningar: Ange ett lagernamn som skiljer sig från lagrets filnamn och som kommer att användas för att identifiera lagret i projektet (i lagerpanelen, med uttryck, i utskriftslayoutens teckenförklaring, …)
Tilldelat koordinatreferenssystem (CRS): Här kan du ändra lagrets tilldelade Coordinate Reference System genom att välja ett nyligen använt i listrutan eller klicka på knappen
 set Projection Select CRS (se Väljare för referenssystem för koordinater). Använd denna process endast om det CRS som tillämpas på lagret är felaktigt eller om inget CRS har tillämpats.
set Projection Select CRS (se Väljare för referenssystem för koordinater). Använd denna process endast om det CRS som tillämpas på lagret är felaktigt eller om inget CRS har tillämpats.
Provider Feature Filter: gör det möjligt att begränsa data som ska användas i det aktuella projektet till en delmängd, med hjälp av funktioner och uttryck på PDAL-dataleverantörsnivå. Tryck på knappen Query Builder längst ned för att börja ställa in filtret.
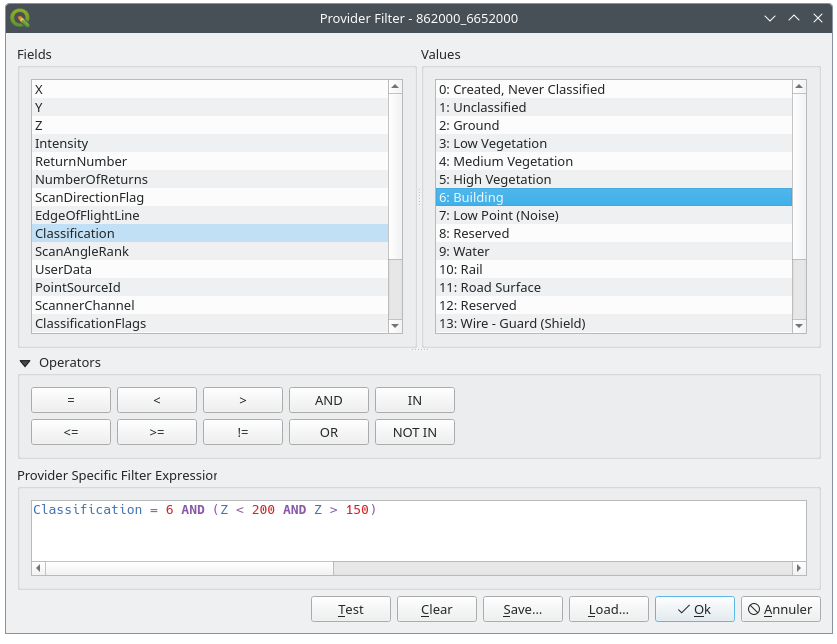
Fig. 16.3 Filtrering av punktmolnslager till byggnader på specifik höjd
I den nedre delen av dialogrutan kan du skriva in ett Providerspecifikt filteruttryck. Ett sådant uttryck kan byggas upp tack vare:
Fields: listan innehåller alla attribut för punktmolnslagret. Om du vill lägga till ett attribut i uttrycket dubbelklickar du på dess namn eller skriver in det i textrutan.
Values: -ramen visar värden eller statistik för det valda attributet, som ett par av typen nyckel:värde. För att lägga till ett värde i uttrycksfältet dubbelklickar du på dess namn i listan: beroende på typen av attribut läggs antingen nyckeln eller värdet till i uttrycket. Eller skriv in värdet i textrutan för uttrycket.
Operatorer: detta verktygsfält innehåller alla operatorer som kan användas. För att lägga till en operator i uttrycksfältet klickar du på lämplig knapp. Relationella operatorer (
=,>, …) och logiska operatorer (AND,OR, …) finns tillgängliga.
Knappen Test hjälper dig att kontrollera syntaxen i din fråga. Använd knappen Clear för att radera frågan och återställa lagret till dess ursprungliga tillstånd (dvs. ladda alla punkter i lagret). Det är möjligt att Save… spara frågan som en
.QQF-fil eller Load… ladda frågan från en fil till dialogrutan.När ett filter tillämpas behandlar QGIS den resulterande delmängden som om den vore hela lagret. Om du t.ex. har använt filtret ovanför för att filtrera byggnader kan du inte t.ex. visa, fråga, spara eller redigera punkter som har vegetationsklassificering eftersom de inte ingår i delmängden.
Tips
Filtrerade lager visas i panelen Lager
I panelen Lager listas ett filtrerat lager med en ikon
 Filter bredvid som anger vilken fråga som används när musen förs över ikonen. Dubbelklicka på ikonen för att öppna dialogrutan Query Builder för redigering. Detta kan också göras via menyn .
Filter bredvid som anger vilken fråga som används när musen förs över ikonen. Dubbelklicka på ikonen för att öppna dialogrutan Query Builder för redigering. Detta kan också göras via menyn .
16.2.3. Egenskaper för symbologi
På fliken  Symbology görs inställningarna för rendering av punktmolnet. I den övre delen finns inställningarna för de olika funktionella renderingarna. I den nedre delen finns sektioner där allmänna inställningar för hela lagret kan göras och som gäller för alla funktionella renderingsprogram.
Symbology görs inställningarna för rendering av punktmolnet. I den övre delen finns inställningarna för de olika funktionella renderingarna. I den nedre delen finns sektioner där allmänna inställningar för hela lagret kan göras och som gäller för alla funktionella renderingsprogram.
16.2.3.1. Renderingstyper för funktioner
Det finns olika alternativ för rendering av punktmoln som kan väljas med hjälp av rullgardinsmenyn längst upp på fliken Symbology (se Fig. 16.4):
 Endast utsträckning: Endast en avgränsande ruta av datautbredningen visas; praktiskt för att få en överblick över datautbredningen. Som vanligt hjälper Symbol widget dig att konfigurera alla egenskaper (färg, streck, opacitet, underlager, …) som du vill ha för rutan.
Endast utsträckning: Endast en avgränsande ruta av datautbredningen visas; praktiskt för att få en överblick över datautbredningen. Som vanligt hjälper Symbol widget dig att konfigurera alla egenskaper (färg, streck, opacitet, underlager, …) som du vill ha för rutan. Attribut efter ramp: Data ritas över en färggradient. Se Attribut för rampåtergivaren
Attribut efter ramp: Data ritas över en färggradient. Se Attribut för rampåtergivaren RGB: Rita data med hjälp av röda, gröna och blå färgvärden. Se RGB-rendering
RGB: Rita data med hjälp av röda, gröna och blå färgvärden. Se RGB-rendering Klassificering: Data ritas med olika färger för olika klasser. Se Klassificering Renderer
Klassificering: Data ritas med olika färger för olika klasser. Se Klassificering Renderer
När ett punktmoln laddas följer QGIS en logik för att välja den bästa renderingsenheten:
om datasetet innehåller färginformation (röda, gröna, blå attribut) används RGB-renderingsprogrammet
else om datasetet innehåller ett
Classification-attribut används den klassificerade renderingstjänstenannars återgår den till rendering baserad på Z-attribut
Om du inte känner till punktmolnets attribut ger  Statistics tab en bra översikt över vilka attribut som finns i punktmolnet och inom vilka intervall värdena ligger.
Statistics tab en bra översikt över vilka attribut som finns i punktmolnet och inom vilka intervall värdena ligger.
För varje renderingsprogram kan du förbättra datavisningen genom att justera punktsymbolstorleken eller aktivera ytstriangulering.
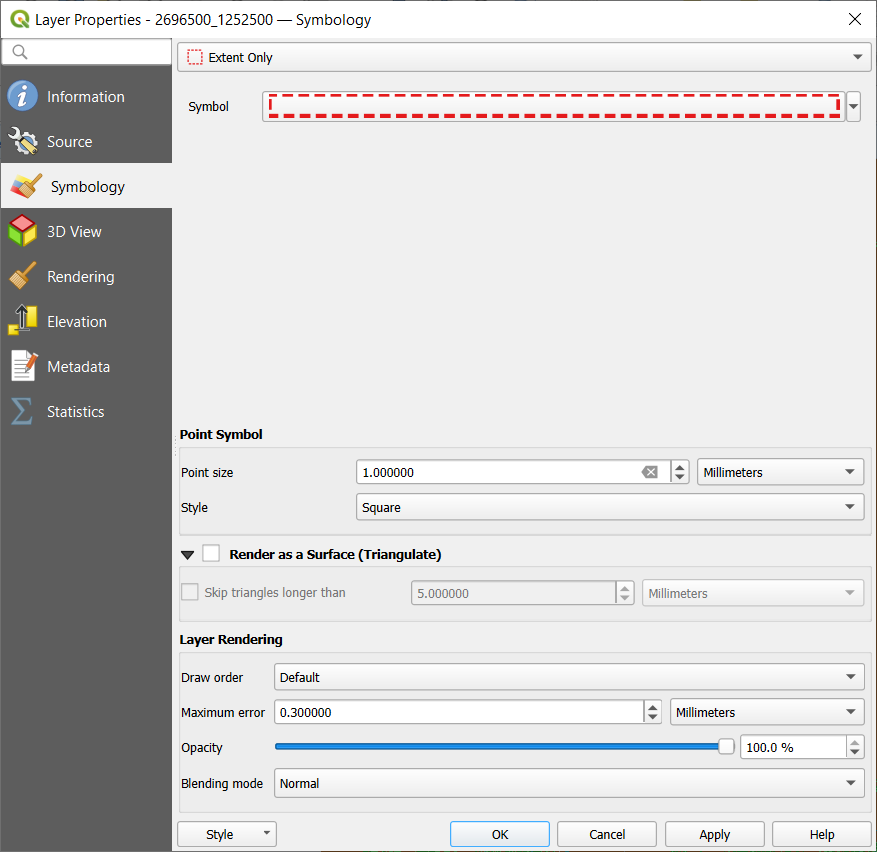
Fig. 16.4 Fliken Punktmolnssymbologi
Attribut för rampåtergivaren
Med Attribute by Ramp kan data visas som numeriska värden över en färggradient. Sådana numeriska värden kan t.ex. vara ett befintligt intensitetsattribut eller Z-värdet. Beroende på ett minimi- och ett maximivärde sprids de andra värdena till färggradienten via interpolation. De olika värdena och deras tilldelning till en viss färg kallas ”färgkarta” och visas i tabellen. Det finns olika inställningsmöjligheter som beskrivs under bilden.
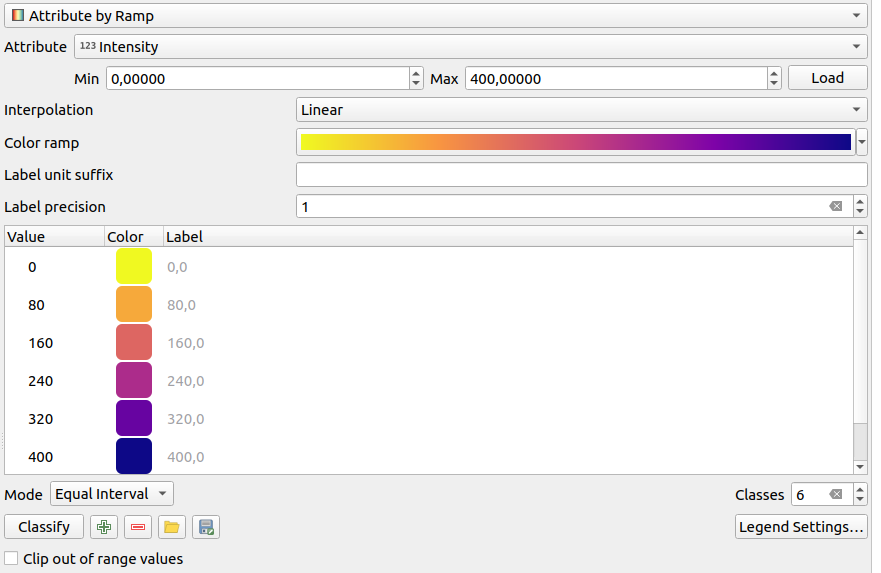
Fig. 16.5 Fliken Symbologi för punktmoln: Attribut per ramp
Min och Max definierar det intervall som tillämpas på färgrampen: värdet Min representerar den vänstra och värdet Max den högra änden av färgrampen, värdena däremellan interpoleras. Som standard identifierar QGIS minimum och maximum från det valda attributet, men de kan ändras. När du har ändrat värdena kan du återställa standardvärdena genom att klicka på knappen Load.
I Interpolation anges hur värden tilldelas färg:
Discrete (en
<=symbol visas i rubriken på kolumnen Value): Färgen tas från den närmaste färgkartsposten med lika eller högre värdeLinear Färgen interpoleras linjärt från färgkartans poster över och under pixelvärdet, vilket innebär att varje värde i datasetet motsvarar en unik färg
Exact (en
=symbol visas i rubriken på kolumnen Value): Endast pixlar med ett värde som är lika med en post i färgkartan får en färg; andra pixlar återges inte.
Widgeten Färgramp hjälper dig att välja den färgramp som ska tilldelas datasetet. Som vanligt med den här widgeten kan du skapa en ny och redigera eller spara den som är vald för tillfället.
Med Label unit suffix läggs en etikett till efter värdet i teckenförklaringen och med Label precision styrs antalet decimaler som ska visas.
Klassificeringen Mode hjälper dig att definiera hur värdena fördelas mellan klasserna:
Kontinuerlig: Klasserna nummer och färg hämtas från färgrampens stopp; gränsvärdena ställs in efter stoppens fördelning i färgrampen (mer information om stopp finns i Inställning av en färgramp).
Equal interval: Antalet klasser bestäms av fältet Classes i slutet av raden; gränsvärden definieras så att klasserna alla har samma storlek.
Klasserna bestäms automatiskt och visas i färgkartans tabell. Men du kan också redigera dessa klasser manuellt:
Genom att dubbelklicka på ett Value i tabellen kan du ändra klassvärdet
Dubbelklick i kolumnen Color öppnar widgeten Färgväljare, där du kan välja en färg som ska gälla för det värdet
Dubbelklicka i kolumnen Label för att ändra etiketten för klassen
Om du högerklickar på markerade rader i färgtabellen visas en kontextuell meny med Change Color… och Change Opacity… för markeringen
Under tabellen finns alternativen att återställa standardklasserna med Classify eller att manuellt  Lägg till lägga till värden eller
Lägg till lägga till värden eller  Ta bort valda värden från tabellen.
Ta bort valda värden från tabellen.
Eftersom en anpassad färgkarta kan vara mycket komplex finns det också möjlighet att  Läs in en befintlig färgkarta eller att
Läs in en befintlig färgkarta eller att  Spara den för användning i andra lager (som en
Spara den för användning i andra lager (som en txt-fil).
Om du har valt Linear för Interpolation kan du också konfigurera:
 Clip out of range values Som standard tilldelar den linjära metoden den första klassens (respektive den sista klassens) färg till värden i datasetet som är lägre än det inställda Min-värdet (respektive högre än det inställda Max-värdet). Markera denna inställning om du inte vill rendera dessa värden.
Clip out of range values Som standard tilldelar den linjära metoden den första klassens (respektive den sista klassens) färg till värden i datasetet som är lägre än det inställda Min-värdet (respektive högre än det inställda Max-värdet). Markera denna inställning om du inte vill rendera dessa värden.Legend settings, för visning i panelen Layers och i layout förklaring. Anpassningen fungerar på samma sätt som med ett rasterlager (mer information finns i Anpassa rasterförklaring).
RGB-rendering
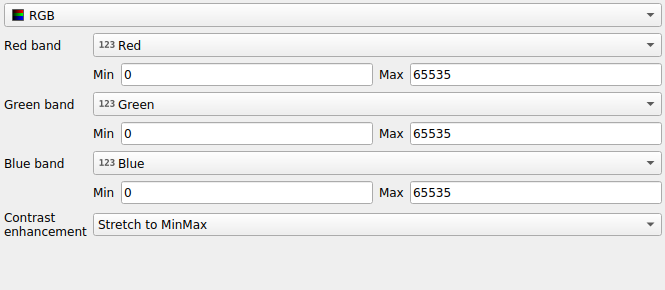
Fig. 16.6 RGB-rendering av punktmoln
Med återgivaren RGB kommer tre valda attribut från punktmolnet att användas som röd, grön och blå komponent. Om attributen har rätt namn väljer QGIS dem automatiskt och hämtar värdena Min och Max för varje band och skalar färgen i enlighet med detta. Det är dock också möjligt att ändra värdena manuellt.
En metod för Kontrastförbättring kan tillämpas på värdena: Ingen förbättring, Stretch till MinMax, Stretch och Clip till MinMax och Clip till MinMax
Observera
Verktyget Kontrastförbättring är fortfarande under utveckling. Om du har problem med det bör du använda standardinställningen Stretch to MinMax.
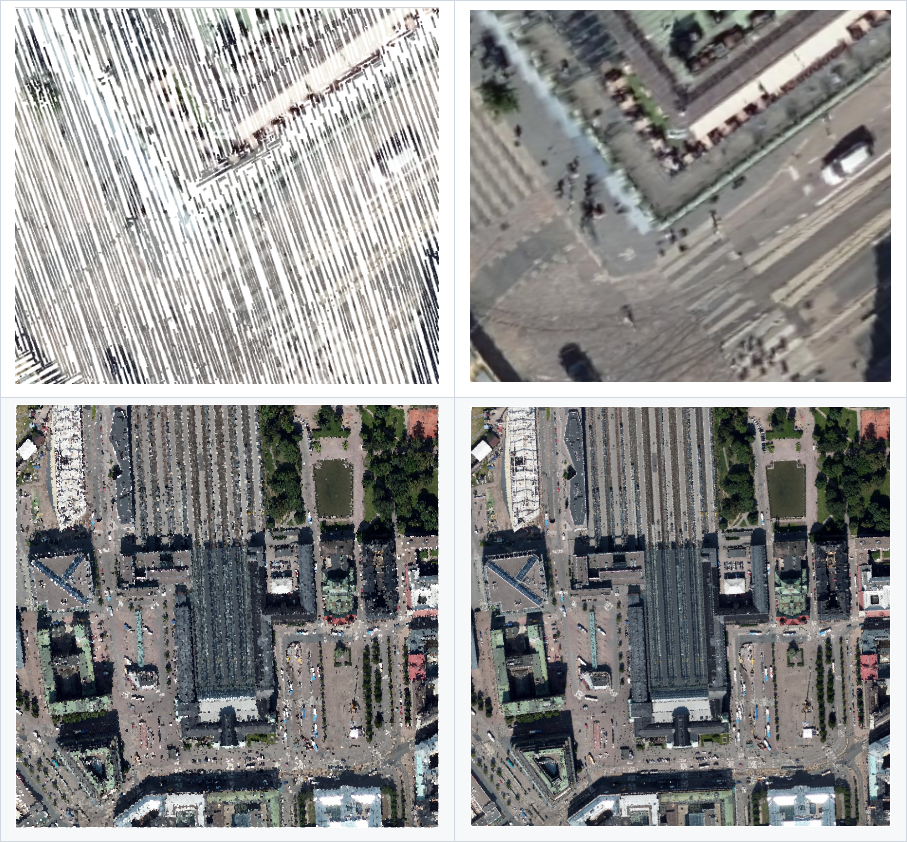
Fig. 16.7 Exempel på RGB-rendering (vänster) kombinerat med triangulering av ytan (höger)
Klassificering Renderer
I renderingen Classification visas punktmolnet differentierat med färg på grundval av ett attribut. Alla typer av attribut kan användas (numeriska, strängar, …). Punktmolnsdata innehåller ofta ett fält som kallas Classification. Detta innehåller vanligtvis data som bestäms automatiskt genom efterbearbetning, t.ex. om vegetation. Med Attribute kan du välja det fält från attributtabellen som ska användas för klassificeringen. Som standard använder QGIS definitionerna i LAS-specifikationen (se tabellen ’ASPRS Standard Point Classes’ i PDF-filen på ASPRS hemsida). Uppgifterna kan dock avvika från detta schema; om du är osäker måste du fråga den person eller institution som du fick uppgifterna från om definitionerna.
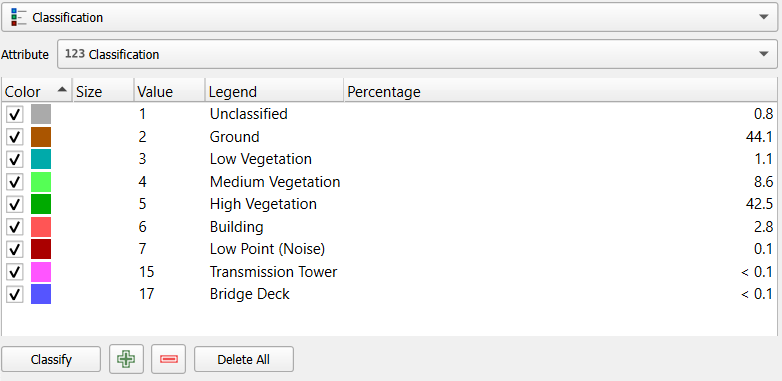
Fig. 16.8 Renderingsprogram för klassificering av punktmoln
I tabellen visas alla använda värden med motsvarande färg och teckenförklaring. I början av varje rad finns en kryssruta (); om den är avmarkerad visas inte längre detta värde på kartan. Genom att dubbelklicka i tabellen kan du ändra:
Color: widgeten Färgväljare öppnas
Size: om du tilldelar en storlek på
0till en kategori kommer den att återgå till att använda standard punktstorlek som ställts in för lagretden Värde
Legend
kolumnen Percentage visar hur kategorin är representerad i lagret.
Du kan också högerklicka på en eller flera rader för att öppna en snabbmeny med alternativ för att ändra färg, opacitet eller punktstorlek.
Under tabellen finns knappar med vilka du kan ändra de standardklasser som genereras av QGIS:
Med knappen Classify kan data klassificeras automatiskt: alla värden som förekommer i attributen och som ännu inte finns i tabellen läggs till
Med
Lägg till och Ta bort kan värden läggas till eller tas bort manuelltDelete All tar bort alla värden från tabellen
Råd
I panelen Layers kan du högerklicka på en klassbladspost i ett lager för att snabbt konfigurera synligheten för motsvarande funktioner.
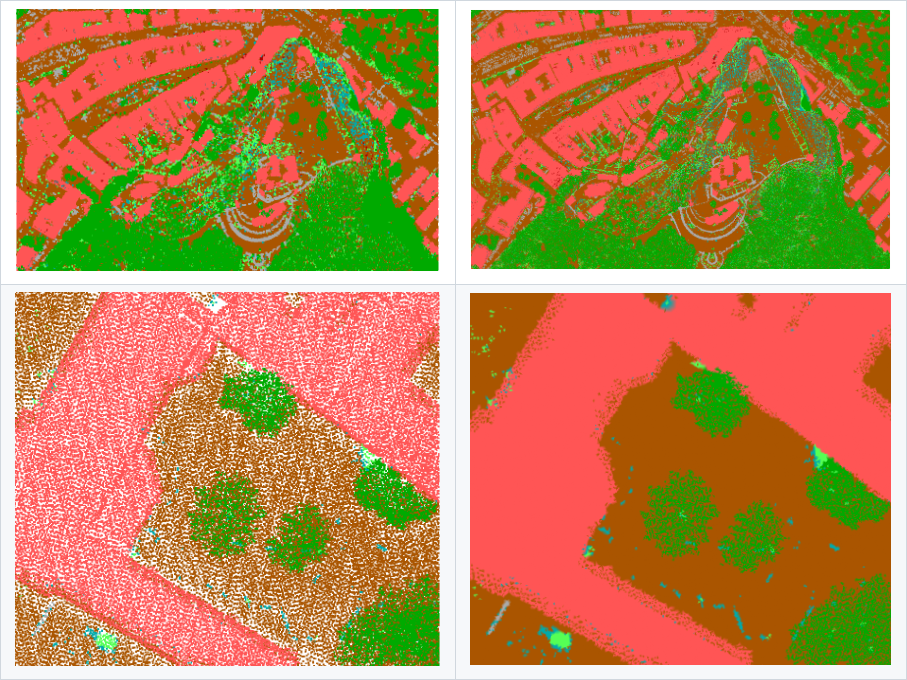
Fig. 16.9 Exempel på klassificeringsrendering (vänster) kombinerat med triangulering av ytan (höger)
16.2.3.2. Punktsymbol
Under Point Symbol kan du ställa in storleken och enheten (t.ex. millimeter, pixlar, tum) som varje datapunkt ska visas med. Antingen Circle eller Square kan väljas som stil för punkterna.
16.2.3.3. Rendera som en yta (triangulera)
Markera Rendera som yta (Triangulera) för att aktivera triangulering av punktmolnslagret i 2D-vyn. Detta alternativ gör det möjligt att rendera trianglar istället för punkter. Varje punkt behåller sin färg för interpolering i triangeln. Du kan styra den horisontella längden på de beräknade trianglarna:
Genom att markera alternativet Skippa trianglar längre än och ställa in tröskelvärdet kan du styra den maximala längden på en sida av trianglarna som ska beaktas i den horisontella planen. Detta kan vara särskilt användbart om du vill identifiera faktiska hål i data.
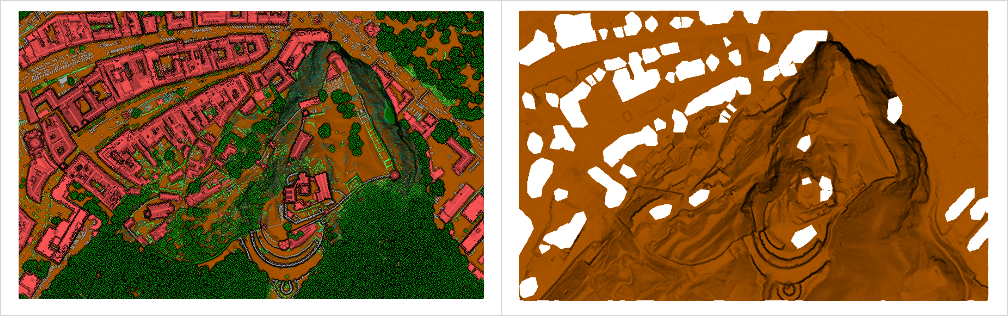
Fig. 16.10 Rendering av data som en yta med kartskuggning (vänster) och med kartskuggning, filtrering av stora trianglar (höger)
16.2.3.4. Rendering av lager
I avsnittet Layer Rendering har du följande alternativ för att ändra renderingen av lagret:
Draw order: gör det möjligt att styra om punktmolnens renderingsordning på 2d-kartans duk ska bero på deras Z-värde. Det är möjligt att rendera :
med Default-ordningen i vilken punkterna lagras i lagret,
från Underst till överst (punkter med större Z-värden täcker lägre punkter vilket ger utseendet på ett äkta ortofoto),
eller från Top to bottom där scenen visas sedd underifrån.
Maximalt fel: Punktmoln innehåller vanligtvis fler punkter än vad som behövs för visningen. Med detta alternativ ställer du in hur tät eller gles visningen av punktmolnet ska vara (detta kan också förstås som ”maximalt tillåtet mellanrum mellan punkter”). Om du ställer in ett stort värde (t.ex. 5 mm) kommer det att finnas synliga mellanrum mellan punkterna. Ett lågt värde (t.ex. 0,1 mm) kan tvinga fram rendering av onödigt många punkter, vilket gör renderingen långsammare (olika enheter kan väljas).
Opacitet: Med det här verktyget kan du göra det underliggande lagret i kartbilden synligt. Använd skjutreglaget för att anpassa synligheten för ditt lager efter dina behov. Du kan också göra en exakt definition av den procentuella synligheten i menyn bredvid skjutreglaget.
Blandningsläge: Med detta verktyg kan du uppnå speciella renderingseffekter. Pixlarna i de överliggande och underliggande lagren blandas med hjälp av de inställningar som beskrivs i Blandningslägen.
Eye dome lighting: detta tillämpar skuggningseffekter på kartans canvas för en bättre djupåtergivning. Renderingskvaliteten beror på egenskapen draw order; Default draw order kan ge suboptimala resultat. Följande parametrar kan kontrolleras:
Strength: ökar kontrasten, vilket ger bättre djupseende
Distance: representerar avståndet mellan de använda pixlarna och mittpixeln och gör att kanterna blir tjockare.
16.2.4. egenskaper för 3D-vy
På fliken  3D View kan du göra inställningar för hur punktmolnet ska återges i 3D-kartor.
3D View kan du göra inställningar för hur punktmolnet ska återges i 3D-kartor.
16.2.4.1. 3D-renderingslägen
Följande alternativ kan väljas från rullgardinsmenyn längst upp på fliken:
Ingen rendering: Data visas inte
Följ 2D-symbologi: Synkroniserar funktioner som renderas i 3D med symbologi som tilldelats i 2D
 Single Color: Alla punkter visas i samma färg oavsett attribut
Single Color: Alla punkter visas i samma färg oavsett attribut- Attribut efter ramp: Interpolerar ett givet attribut över en färgramp och tilldelar funktioner deras matchande färg. Se Attribut för rampåtergivaren.
- RGB: Använd olika attribut för funktionerna för att ställa in de röda, gröna och blå färgkomponenterna som ska tilldelas dem. Se RGB-rendering.
- Classification: särskiljer punkter med färg på grundval av ett attribut. Se Klassificering Renderer.
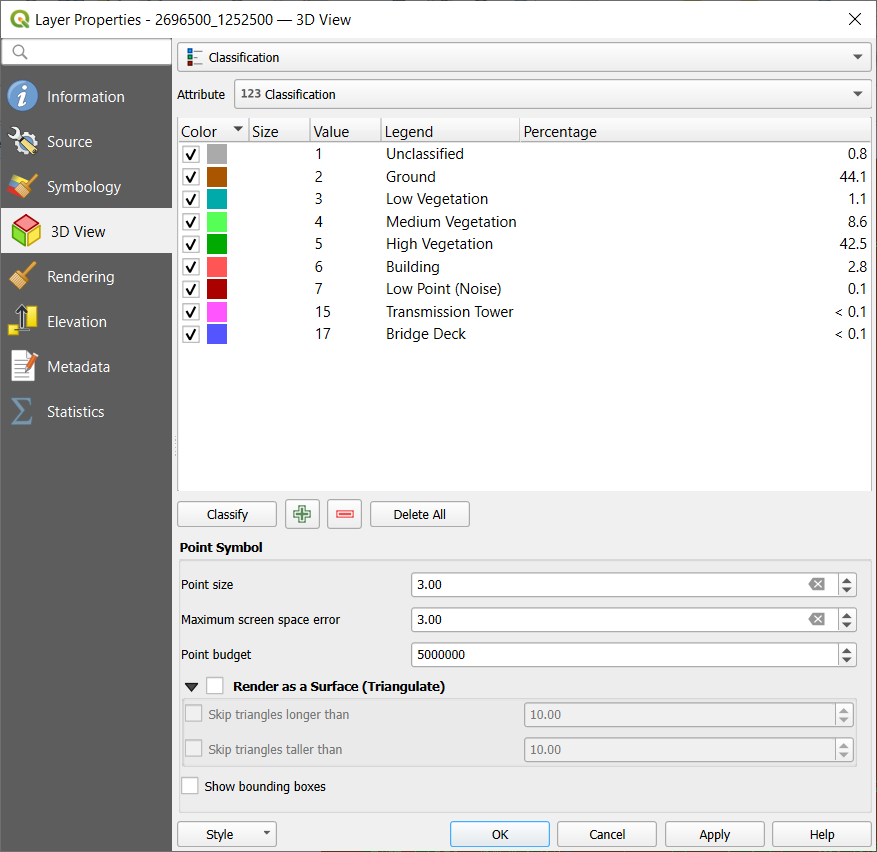
Fig. 16.11 Punktmolnets 3D-vyflik med klassificeringsrenderaren
16.2.4.2. 3D-punktsymbol
I den nedre delen av fliken 3D View hittar du avsnittet Point Symbol. Här kan du göra allmänna inställningar för hela lagret som är desamma för alla renderare. Det finns följande alternativ:
Punktstorlek: Den storlek (i pixlar) som varje datapunkt visas med kan ställas in
Maximalt fel på skärmutrymmet: Med detta alternativ ställer du in hur tät eller gles visningen av punktmolnet ska vara (i pixlar). Om du anger ett stort värde (t.ex. 10) kommer det att finnas synliga luckor mellan punkterna; ett lågt värde (t.ex. 0) kan tvinga fram rendering av onödigt många punkter, vilket gör renderingen långsammare (du hittar mer information i Symbology Maximum error).
Punktbudget: För att undvika långa renderingar kan du ställa in det maximala antalet punkter som ska renderas
Markera
Render as surface (Triangulate) för att rendera punktmolnslagret i 3D-vyn med en solid yta som erhålls genom triangulering. Du kan styra dimensionerna på de beräknade trianglarna:- Hoppa över trianglar som är längre än ett tröskelvärde: anger i den horisontella planen den maximala längden på en sida av trianglarna som ska beaktas
- Hoppa över trianglar som är högre än ett tröskelvärde: anger i den vertikala planen den maximala höjden på en sida av trianglarna som ska beaktas
- Visa begränsningsrutor: Speciellt användbart för felsökning, visar begränsningsrutor för noder i hierarkin
16.2.5. Rendering av egenskaper
I grupprutan Scale dependent visibility kan du ställa in skalan Maximum (inclusive) och Minimum (exclusive) och definiera ett skalområde inom vilket objekten ska vara synliga. Utanför detta intervall är de dolda. Knappen  Set to current canvas scale hjälper dig att använda den aktuella kartans skala som gräns för synlighetsintervallet. Se Väljare för synlighetsskala för mer information.
Set to current canvas scale hjälper dig att använda den aktuella kartans skala som gräns för synlighetsintervallet. Se Väljare för synlighetsskala för mer information.
Observera
Du kan också aktivera skalberoende synlighet på ett lager från panelen Layers: högerklicka på lagret och välj Set Layer Scale Visibility i snabbmenyn.
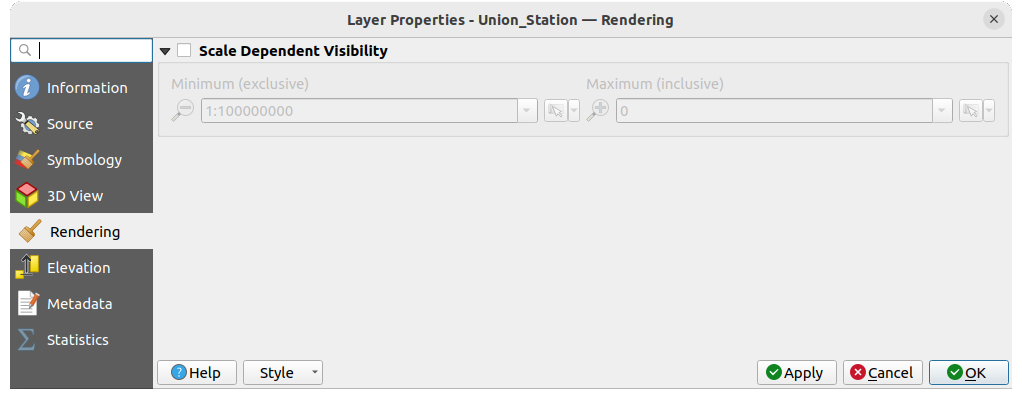
Fig. 16.12 Fliken Rendering av punktmoln
16.2.6. Elevation Egenskaper
På fliken  Elevation kan du ställa in korrigeringar för Z-värdena i data. Detta kan vara nödvändigt för att justera höjden på data i 3D-kartor och dess utseende i profile tool charts. Det finns följande alternativ:
Elevation kan du ställa in korrigeringar för Z-värdena i data. Detta kan vara nödvändigt för att justera höjden på data i 3D-kartor och dess utseende i profile tool charts. Det finns följande alternativ:
Vertikalt referenssystem: Om CRS för punktmolnslagret är ett sammansatt CRS (inklusive en Z-dimension), kommer det vertikala CRS som används för lagret automatiskt att härledas från den vertikala komponenten i lagrets CRS. I det här fallet kan du inte manuellt ställa in en annan vertikal CRS och alternativet att ändra den kommer att inaktiveras. Om punktmolnslagret använder ett horisontellt (2D) CRS (vilket dock är ovanligt) kan du manuellt välja ett specifikt vertikalt CRS genom att klicka på
Välj CRS. Vertikala referenssystem stöds för punktmolnlager i:Under Elevation-gruppen:
Du kan ställa in en Scale: Om
10anges här visas en punkt som har värdet Z =5på en höjd av50.En förskjutning till z-nivån kan anges. Detta är användbart för att matcha olika datakällor i höjdled med varandra. Som standard används det lägsta z-värdet i data som detta värde. Detta värde kan också återställas med knappen
 Uppdatera i slutet av raden.
Uppdatera i slutet av raden.
Under Profile Chart Accuracy hjälper Maximum error dig att kontrollera hur tätt eller glest punkterna ska återges i höjdprofilen. Större värden resulterar i en snabbare generering med färre punkter inkluderade.
Under Profile Chart Appearance kan du styra poängvisningen:
Point size: den storlek som punkterna ska återges med, i enheter som stöds (millimeter, kartenheter, pixlar, …)
Style: om punkterna ska återges som Circle eller Square
Använd en enda Color på alla punkter som syns i profilvyn
Markera
Respect layer’s coloring för att istället visa punkterna med den färg som tilldelats via deras 2D symbology Apply opacity by distance from curve effect, minskar opaciteten för punkter som ligger längre bort från profilkurvan
Apply opacity by distance from curve effect, minskar opaciteten för punkter som ligger längre bort från profilkurvan
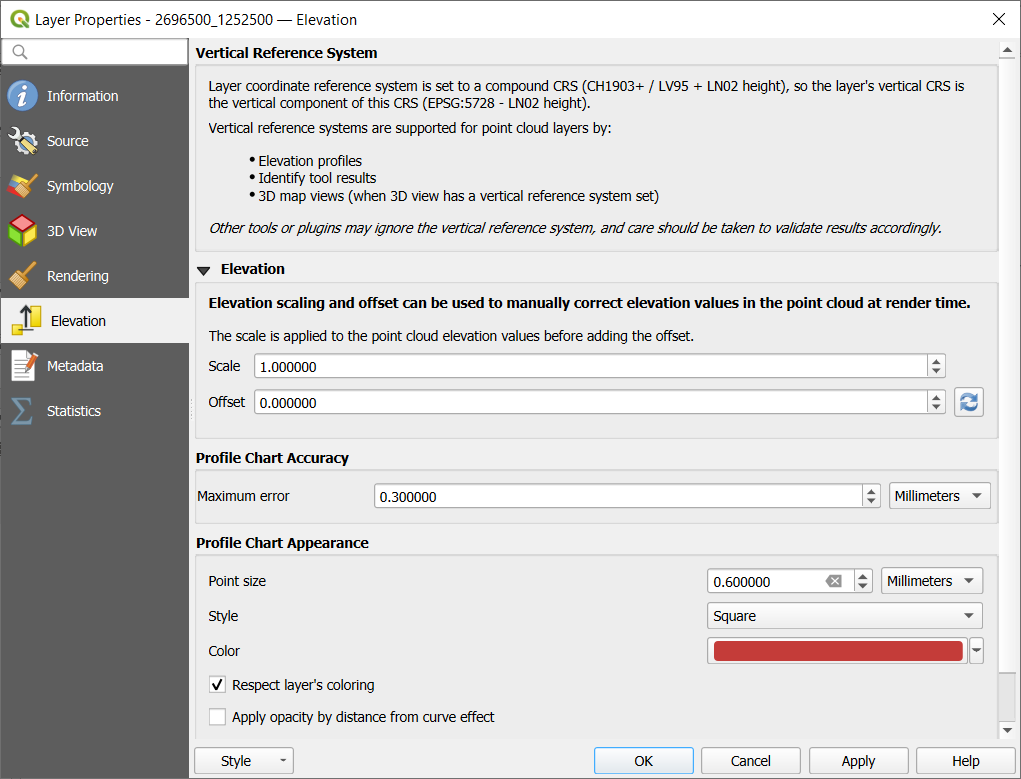
Fig. 16.13 Fliken för punktmolnets höjd
16.2.7. Egenskaper för metadata
Fliken Metadata ger dig alternativ för att skapa och redigera en metadatarapport om ditt lager. Se Metadata för mer information.
16.2.8. Statistik Egenskaper
På fliken Statistics kan du få en översikt över attributen i ditt punktmoln och deras fördelning.
Längst upp hittar du avsnittet Attribute Statistics. Här listas alla attribut som finns i punktmolnet, samt några av deras statistiska värden: Minimum, Maximum, Mean, Standard Deviation
Om det finns ett attribut Classification, så finns det en annan tabell i den nedre delen. Här listas alla värden som ingår i attributet, samt deras absoluta Count och relativa % abundans.
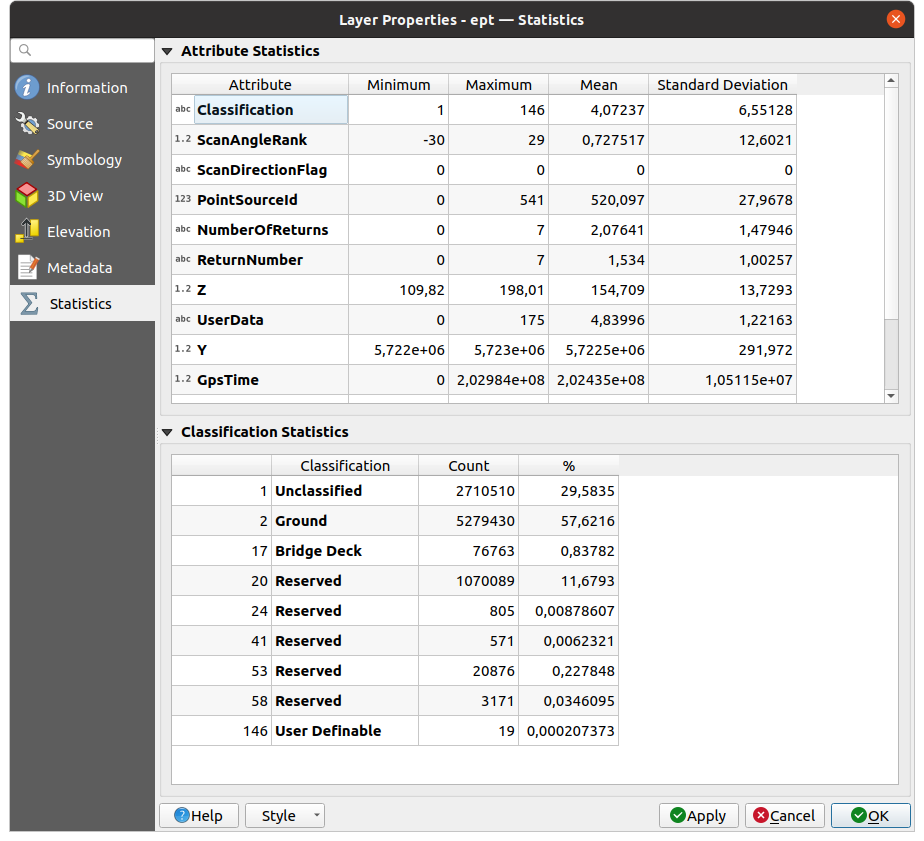
Fig. 16.14 Fliken Statistik för punktmoln
16.3. Virtuellt punktmoln
Lidarundersökningar av större områden är ofta dataset på flera terabyte med många miljarder punkter. Att ha så stora datamängder representerade som en enda punktmolnsfil är inte praktiskt på grund av svårigheterna med lagring, överföring, visning och analys. Punktmolnsdata lagras och distribueras därför vanligtvis uppdelade i kvadratiska rutor (t.ex. ”1 km x 1 km”), där varje ruta har en mer hanterbar filstorlek (t.ex. ~ 200 MB när den komprimeras).
Tiling av data löser problemen med datastorlek, men det medför problem vid bearbetning eller visning av ett intresseområde som inte helt ryms inom en enda tile. Användarna måste utveckla arbetsflöden som tar hänsyn till flera tiles och särskild omsorg måste ägnas åt att hantera data nära tiles kanter för att undvika oönskade artefakter i utdata. På samma sätt blir det besvärligt att ladda många enskilda filer och använda samma symbologi när man tittar på punktmolnsdata.
Här är ett exempel på flera punktmoln som laddats i QGIS. Varje kakelplatta stylas baserat på kakelplattans min/max Z-värden, vilket skapar synliga artefakter på kakelplattans kanter. Stylingen måste justeras för varje lager separat:

Fig. 16.15 Enskilda punktmoln laddas, med artefakter på kanterna
I GIS-världen är många användare bekanta med begreppet virtuella raster. Ett virtuellt raster är en fil som helt enkelt refererar till andra rasterfiler med faktiska data. På så sätt behandlar GIS-programvaran hela datasetet som består av många filer som ett enda rasterlager, vilket gör det mycket enklare att visa och analysera alla raster som listas i den virtuella filen.
Med utgångspunkt i konceptet virtuella raster från GDAL är virtuella punktmoln (VPC) ett filformat som refererar till andra punktmolnsfiler. Programvara som stöder virtuella punktmoln hanterar hela den kaklade datamängden som en enda datakälla.
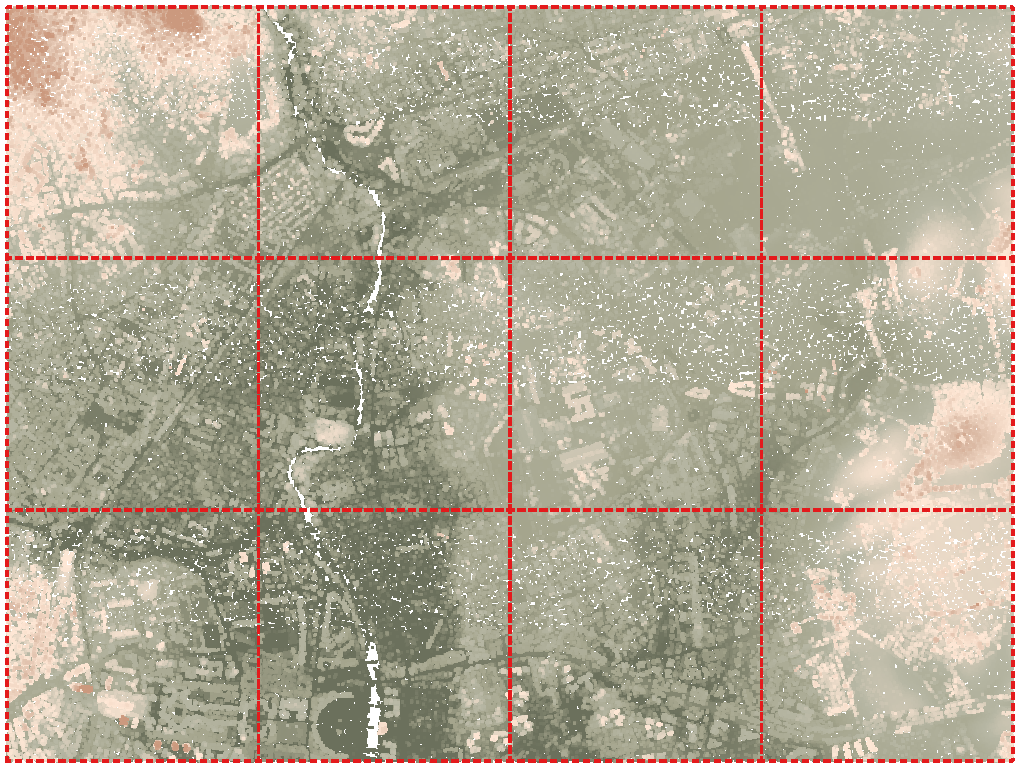
Fig. 16.16 Det virtuella punktmolnet
Att visa och manipulera virtuella punktmoln är mycket smidigare och enklare.
Fig. 16.17 Det virtuella punktmolnets utdata i 2D: visa detaljer när du zoomar in
I grund och botten är en virtuell punktmolnsfil en enkel JSON-fil med tillägget .vpc, som innehåller referenser till faktiska datafiler (t.ex. .LAS, .LAZ eller .COPC-filer) och ytterligare metadata som extraherats från filerna. Även om det är möjligt att skriva VPC-filer för hand, rekommenderas det starkt att skapa dem med hjälp av ett automatiserat verktyg, t.ex:
Algoritmen Processing Skapa ett virtuellt punktmoln (VPC)
Kommandot
build_vpci verktyget PDAL wrench
För mer information hänvisas till ”VPC-specifikationen” <https://github.com/PDAL/wrench/blob/main/vpc-spec.md>`_ som också innehåller bästa praxis och valfria tillägg (t.ex. översikter).