Important
La traduction est le fruit d’un effort communautaire auquel vous pouvez vous joindre. Cette page est actuellement traduite à 84.34%.
24.1.20. Analyse de terrain raster
24.1.20.1. Orientation
Calcule l’aspect du modèle numérique de terrain en entrée. La couche raster finale de l’aspect contient des valeurs de 0 à 360 qui expriment la direction de la pente, en commençant par le nord (0°) et en continuant dans le sens des aiguilles d’une montre.
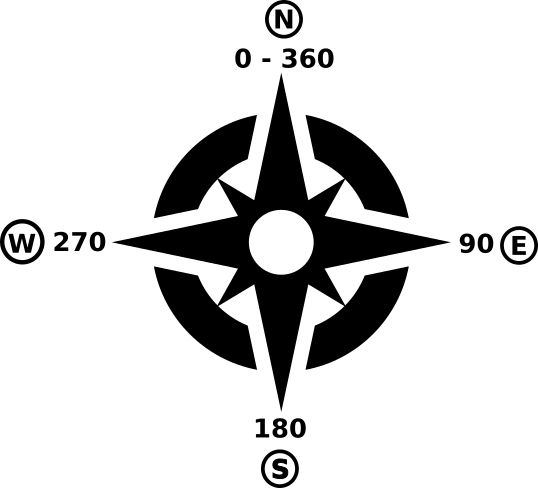
Fig. 24.71 Valeurs d’orientation
L’image suivante montre la couche d’orientation reclassée avec une rampe de couleur:
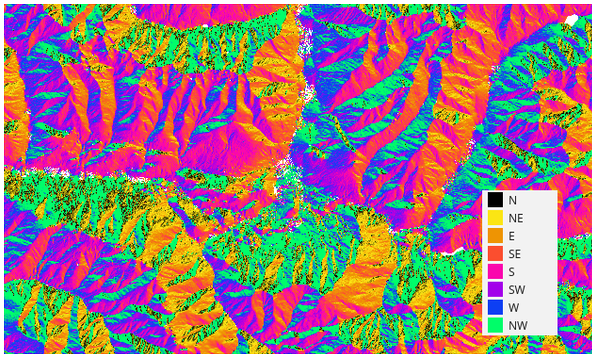
Fig. 24.72 Couche d’orientation reclassée
Paramètres
Etiquette |
Nom |
Type |
Description |
|---|---|---|---|
Couche d’élévation |
|
[raster] |
Couche raster de modèle de terrain numérique |
Facteur Z |
|
[numérique: décimal] Par défaut : 1.0 |
Exagération verticale. Ce paramètre est utile lorsque les unités Z diffèrent des unités X et Y, par exemple les pieds et les mètres. Vous pouvez utiliser ce paramètre pour régler cela. La valeur par défaut est 1 (pas d’exagération). |
Orientation |
|
[raster] Par défaut : |
Specify the output aspect raster layer. One of:
|
Les sorties
Etiquette |
Nom |
Type |
Description |
|---|---|---|---|
Orientation |
|
[raster] |
La couche raster d’orientation en sortie |
Code Python
Algorithm ID: native:aspect
import processing
processing.run("algorithm_id", {parameter_dictionary})
L”id de l’algorithme est affiché lors du survol du nom de l’algorithme dans la boîte à outils Traitements. Les nom et valeur de chaque paramètre sont fournis via un dictionnaire de paramètres. Voir Utiliser les algorithmes du module de traitements depuis la console Python pour plus de détails sur l’exécution d’algorithmes via la console Python.
24.1.20.2. DTM filter (slope-based)
Ajouté dans la version 3.34
Can be used to filter a digital elevation model in order to classify its cells into ground and object (non-ground) cells.
The tool uses concepts as described by Vosselman (2000)
and is based on the assumption that a large height difference between two nearby cells is unlikely to be caused by a steep slope in the terrain.
The probability that the higher cell might be non-ground increases when the distance between the two cells decreases.
Therefore the filter defines a maximum height difference (dz_max) between two cells as a function of the distance (d) between the cells (dz_max( d ) = d).
A cell is classified as terrain if there is no cell within the kernel radius
to which the height difference is larger than the allowed maximum height difference at the distance between these two cells.
The approximate terrain slope (s) parameter is used to modify the filter function
to match the overall slope in the study area (dz_max( d ) = d * s).
A 5 % confidence interval (ci = 1.65 * sqrt( 2 * stddev )) may be used to modify the filter function even further
by either relaxing (dz_max( d ) = d * s + ci) or amplifying (dz_max( d ) = d * s - ci) the filter criterium.
References: Vosselman, G. (2000): Slope based filtering of laser altimetry data. IAPRS, Vol. XXXIII, Part B3, Amsterdam, The Netherlands, 935-942
Voir aussi
This tool is a port of the SAGA DTM Filter (slope-based)
Paramètres
Paramètres basiques
Etiquette |
Nom |
Type |
Description |
|---|---|---|---|
Couche en entrée |
|
[raster] |
Couche raster de modèle de terrain numérique |
Numéro de bande |
|
[bande raster] |
The band of the DEM to consider |
Kernel radius (pixels) |
|
[numérique : entier] Par défaut : 5 |
The radius of the filter kernel (in pixels). Must be large enough to reach ground cells next to non-ground objects. |
Terrain slope (%, pixel size/vertical units) |
|
[numérique: décimal] Default: 30.0 |
The approximate terrain slope in |
Filter modification |
|
[liste] Par défaut : 0 |
Choose whether to apply the filter kernel without modification or to use a confidence interval to relax or amplify the height criterium.
|
Écart-type |
|
[numérique: décimal] Par défaut : 0.1 |
The standard deviation used to calculate a 5% confidence interval applied to the height threshold. |
Output layer (ground) Optionnel |
|
[raster] Par défaut : |
Specify the filtered DEM containing only cells classified as ground. One of:
|
Output layer (non-ground objects) Optionnel |
|
[raster] Par défaut : |
Specify the non-ground objects removed by the filter. One of:
|
Paramètres avancés
Etiquette |
Nom |
Type |
Description |
|---|---|---|---|
Options de création Optionnel
|
|
[Chaîne de caractères] Par défaut : “” |
Pour ajouter une ou plusieurs options de création qui contrôlent le raster à créer (couleurs, taille de bloc, compression de fichier …). Pour plus de commodité, vous pouvez utiliser des profils prédéfinis (voir les options de pilote GDAL). Pour le processus en lot et le modeleur graphique : séparez les différentes options avec le caractère pipe ( |
Les sorties
Etiquette |
Nom |
Type |
Description |
|---|---|---|---|
Output layer (ground) |
|
[raster] |
The filtered DEM containing only cells classified as ground. |
Output layer (non-ground objects) |
|
[raster] |
The non-ground objects removed by the filter. |
Code Python
ID de l’algorithme : native:dtmslopebasedfilter
import processing
processing.run("algorithm_id", {parameter_dictionary})
L”id de l’algorithme est affiché lors du survol du nom de l’algorithme dans la boîte à outils Traitements. Les nom et valeur de chaque paramètre sont fournis via un dictionnaire de paramètres. Voir Utiliser les algorithmes du module de traitements depuis la console Python pour plus de détails sur l’exécution d’algorithmes via la console Python.
24.1.20.3. Fill sinks (Wang & Liu)
Added in 3.44
Uses a method proposed by Wang & Liu to identify and fill surface depressions in digital elevation models.
The method was enhanced to allow the creation of hydrologically sound elevation models, i.e. not only to fill the depression(s) but also to preserve a downward slope along the flow path. If desired, this is accomplished by preserving a minimum slope gradient (and thus elevation difference) between cells.
References: Wang, L. & H. Liu (2006): An efficient method for identifying and filling surface depressions in digital elevation models for hydrologic analysis and modelling. International Journal of Geographical Information Science, Vol. 20, No. 2: 193-213.
Voir aussi
This tool is a port of the SAGA Fill Sinks (Wang & Liu) tool.
Paramètres
Paramètres basiques
Etiquette |
Nom |
Type |
Description |
|---|---|---|---|
Couche en entrée |
|
[raster] |
Couche raster de modèle de terrain numérique |
Numéro de bande |
|
[bande raster] Par défaut : 1 |
The band of the DEM to consider |
Minimum slope (degrees) |
|
[numérique: décimal] Default: 0.10 |
Minimum slope gradient to preserve from cell to cell; with a value of zero, sinks are filled up to the spill elevation (which results in flat areas). |
Output layer (filled DEM) Optionnel |
|
[raster] Par défaut : |
Specify the output raster corresponding to the depression-free DEM. One of:
|
Output layer (flow directions) Optionnel |
|
[raster] Par défaut : |
Specify the output raster with computed flow directions. One of:
|
Output layer (watershed basins) Optionnel |
|
[raster] Par défaut : |
Specify the output raster corresponding to the delineated watershed basins. One of:
|
Paramètres avancés
Etiquette |
Nom |
Type |
Description |
|---|---|---|---|
Options de création Optionnel |
|
[Chaîne de caractères] Par défaut : “” |
Pour ajouter une ou plusieurs options de création qui contrôlent le raster à créer (couleurs, taille de bloc, compression de fichier …). Pour plus de commodité, vous pouvez utiliser des profils prédéfinis (voir les options de pilote GDAL). Pour le processus en lot et le modeleur graphique : séparez les différentes options avec le caractère pipe ( |
Les sorties
Etiquette |
Nom |
Type |
Description |
|---|---|---|---|
Output layer (filled DEM) |
|
[raster] |
Output raster corresponding to the depression-free digital elevation model. |
Output layer (flow directions) |
|
[raster] |
Output raster with computed flow directions; 0=N, 1=NE, 2=E, … 7=NW. |
Output layer (watershed basins) |
|
[raster] |
Output raster corresponding to the delineated watershed basins. |
Code Python
Algorithm ID: native:fillsinkswangliu
import processing
processing.run("algorithm_id", {parameter_dictionary})
L”id de l’algorithme est affiché lors du survol du nom de l’algorithme dans la boîte à outils Traitements. Les nom et valeur de chaque paramètre sont fournis via un dictionnaire de paramètres. Voir Utiliser les algorithmes du module de traitements depuis la console Python pour plus de détails sur l’exécution d’algorithmes via la console Python.
24.1.20.4. Ombrage
Calcule la couche raster d’ombres à partir d’un modèle numérique de terrain.
L’ombrage de la couche est calculée en fonction de la position du soleil: vous avez la possibilité de modifier à la fois l’angle horizontal (azimut) et l’angle vertical (élévation du soleil) du soleil.
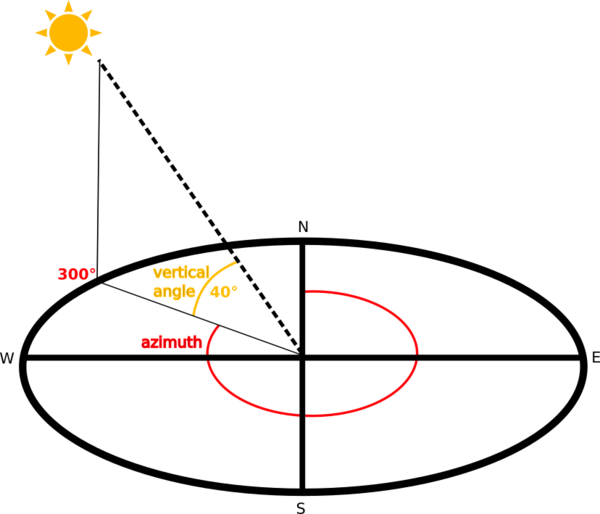
Fig. 24.73 Azimut et angle vertical
La couche d’ombrage contient des valeurs comprises entre 0 (ombre complète) et 255 (soleil complet). L” ombrage est généralement utilisée pour mieux comprendre le relief de la région.
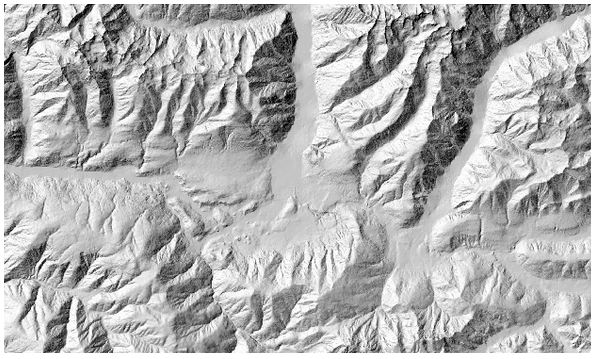
Fig. 24.74 Couche ombrage avec azimut 300 et angle vertical 45
Il est particulièrement intéressant de donner à la couche d’ombrage une valeur de transparence et de la comparer avec le raster d’élévation:
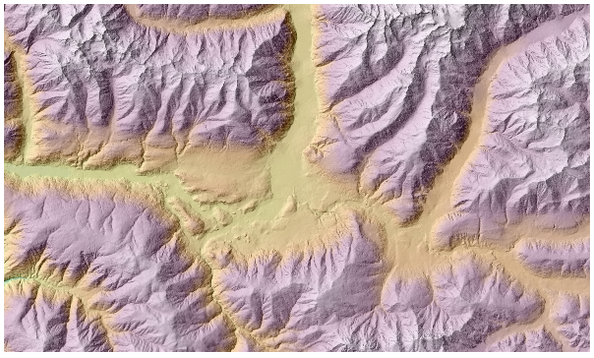
Fig. 24.75 Comparaison de l’ombrage avec la couche d’élévation
Paramètres
Etiquette |
Nom |
Type |
Description |
|---|---|---|---|
Couche d’élévation |
|
[raster] |
Couche raster de modèle de terrain numérique |
Facteur Z |
|
[numérique: décimal] Par défaut : 1.0 |
Exagération verticale. Ce paramètre est utile lorsque les unités Z diffèrent des unités X et Y, par exemple les pieds et les mètres. Vous pouvez utiliser ce paramètre pour régler cela. Augmenter la valeur de ce paramètre exagérera le résultat final (ce qui le rendra plus « vallonné »). La valeur par défaut est 1 (pas d’exagération). |
Azimut (angle horizontal) |
|
[numérique: décimal] Par défaut : 300.0 |
Réglez l’angle horizontal (en degrés) du soleil (dans le sens des aiguilles d’une montre). Plage: 0 à 360. 0 correspond au nord. |
Angle vertical |
|
[numérique: décimal] Par défaut : 40.0 |
Réglez l’angle vertical (en degrés) du soleil, c’est-à-dire la hauteur du soleil. Les valeurs peuvent aller de 0 (élévation minimale) à 90 (élévation maximale). |
Ombrage |
|
[raster] Par défaut : |
Specify the output hillshade raster layer. One of:
|
Les sorties
Etiquette |
Nom |
Type |
Description |
|---|---|---|---|
Ombrage |
|
[raster] |
Couche raster ombrage en sortie |
Code Python
Algorithm ID: native:hillshade
import processing
processing.run("algorithm_id", {parameter_dictionary})
L”id de l’algorithme est affiché lors du survol du nom de l’algorithme dans la boîte à outils Traitements. Les nom et valeur de chaque paramètre sont fournis via un dictionnaire de paramètres. Voir Utiliser les algorithmes du module de traitements depuis la console Python pour plus de détails sur l’exécution d’algorithmes via la console Python.
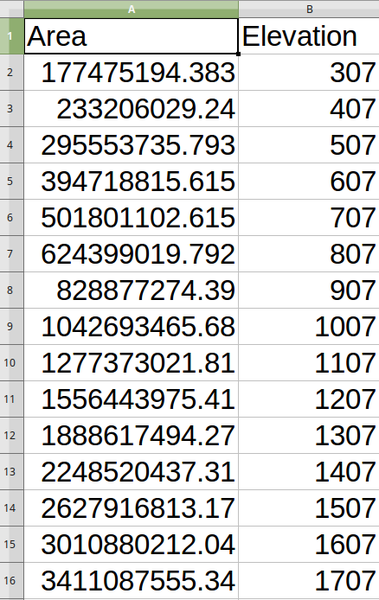
24.1.20.5. Courbes hypsométriques
Calcule les courbes hypsométriques d’un modèle numérique d’élévation. Les courbes sont générées sous la forme de fichiers CSV dans un dossier de sortie spécifié par l’utilisateur.
Une courbe hypsométrique est un histogramme cumulatif des valeurs d’élévation dans une zone géographique.
Vous pouvez utiliser des courbes hypsométriques pour détecter les différences dans le paysage dues à la géomorphologie du territoire.
Paramètres
Etiquette |
Nom |
Type |
Description |
|---|---|---|---|
MNT à analyser |
|
[raster] |
Couche raster de modèle de terrain numérique à utiliser pour calculer les altitudes |
Couche limite |
|
[vecteur : polygone] |
Couche de vecteur de polygone avec les limites des zones utilisées pour calculer les courbes hypsométriques |
Étape |
|
[numérique: décimal] Par défaut : 100.0 |
Distance verticale entre les courbes |
Utiliser % de la surface au lieu de la valeur absolue |
|
[booléen] Par défaut : Faux |
Ecrire le pourcentage de zone dans le champ « Surface » du fichier CSV au lieu de la zone absolue |
Courbes hypsométriques |
|
[répertoire] |
Specify the output folder for the hypsometric curves. One of:
|
Les sorties
Etiquette |
Nom |
Type |
Description |
|---|---|---|---|
Courbes hypsométriques |
|
[répertoire] |
Répertoire contenant les fichiers avec les courbes hypsométriques. Pour chaque entité de la couche vectorielle d’entrée, un fichier CSV avec des valeurs de zone et d’altitude sera créé. Les noms de fichiers commençant par |
Code Python
ID de l’algorithme : qgis:hypsometriccurves
import processing
processing.run("algorithm_id", {parameter_dictionary})
L”id de l’algorithme est affiché lors du survol du nom de l’algorithme dans la boîte à outils Traitements. Les nom et valeur de chaque paramètre sont fournis via un dictionnaire de paramètres. Voir Utiliser les algorithmes du module de traitements depuis la console Python pour plus de détails sur l’exécution d’algorithmes via la console Python.
24.1.20.6. Relief
Crée une couche de relief ombrée à partir des données d’élévation numériques. Vous pouvez spécifier la couleur du relief manuellement ou laisser l’algorithme choisir automatiquement toutes les classes de relief.

Fig. 24.76 Couche de relief
Paramètres
Etiquette |
Nom |
Type |
Description |
|---|---|---|---|
Couche d’élévation |
|
[raster] |
Couche raster de modèle de terrain numérique |
Facteur Z |
|
[numérique: décimal] Par défaut : 1.0 |
Exagération verticale. Ce paramètre est utile lorsque les unités Z diffèrent des unités X et Y, par exemple les pieds et les mètres. Vous pouvez utiliser ce paramètre pour régler cela. Augmenter la valeur de ce paramètre exagérera le résultat final (ce qui le rendra plus « vallonné »). La valeur par défaut est 1 (pas d’exagération). |
Générez automatiquement des classes de relief |
|
[booléen] Par défaut : Faux |
Si vous cochez cette option, l’algorithme créera automatiquement toutes les classes de couleurs en relief |
Couleurs de relief Optionnel |
|
[widget table] |
Utilisez le widget de tableau si vous souhaitez choisir les couleurs de relief manuellement. Vous pouvez ajouter autant de classes de couleurs que vous le souhaitez: pour chaque classe, vous pouvez choisir la limite inférieure et supérieure et enfin en cliquant sur la ligne de couleur, vous pouvez choisir la couleur grâce au widget couleur. 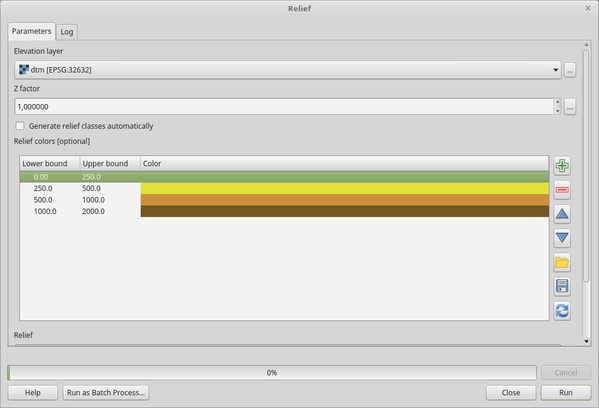
Fig. 24.77 Réglage manuel des classes de couleurs relief Les boutons dans le panneau de droite vous permettent: d’ajouter ou de supprimer des classes de couleurs, de modifier l’ordre des classes de couleurs déjà définies, d’ouvrir un fichier existant avec des classes de couleurs et d’enregistrer les classes actuelles en tant que fichier. |
Relief |
|
[raster] Par défaut : |
Specify the output relief raster layer. One of:
|
Distribution de fréquence Optionnel |
|
[vecteur : table] Par défaut : |
Specify the CSV table for the output frequency distribution. One of:
|
Les sorties
Etiquette |
Nom |
Type |
Description |
|---|---|---|---|
Relief |
|
[raster] |
Couche raster en relief de sortie |
Distribution de fréquence |
|
[vecteur : table] |
La distribution de fréquence de sortie |
Code Python
ID de l’algorithme : qgis:relief
import processing
processing.run("algorithm_id", {parameter_dictionary})
L”id de l’algorithme est affiché lors du survol du nom de l’algorithme dans la boîte à outils Traitements. Les nom et valeur de chaque paramètre sont fournis via un dictionnaire de paramètres. Voir Utiliser les algorithmes du module de traitements depuis la console Python pour plus de détails sur l’exécution d’algorithmes via la console Python.
24.1.20.7. Indice de rugosité
Calcule la mesure quantitative de l’hétérogénéité du terrain décrite par Riley et al. (1999). Il est calculé pour chaque emplacement, en résumant le changement d’altitude dans la grille de 3x3 pixels.
Chaque pixel contient la différence d’élévation d’une cellule centrale et des 8 cellules qui l’entourent.
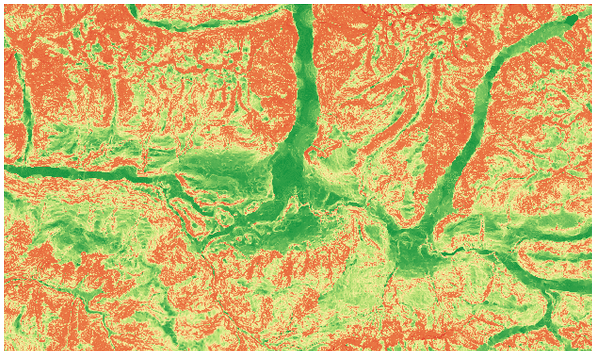
Fig. 24.78 Couche de rugosité des valeurs faibles (rouge) aux valeurs élevées (vert)
Paramètres
Etiquette |
Nom |
Type |
Description |
|---|---|---|---|
Couche d’élévation |
|
[raster] |
Couche raster de modèle de terrain numérique |
Facteur Z |
|
[numérique: décimal] Par défaut : 1.0 |
Exagération verticale. Ce paramètre est utile lorsque les unités Z diffèrent des unités X et Y, par exemple les pieds et les mètres. Vous pouvez utiliser ce paramètre pour régler cela. Augmenter la valeur de ce paramètre exagérera le résultat final (ce qui le rendra plus robuste). La valeur par défaut est 1 (pas d’exagération). |
Rugosité |
|
[raster] Par défaut : |
Specify the output ruggedness raster layer. One of:
|
Les sorties
Etiquette |
Nom |
Type |
Description |
|---|---|---|---|
Rugosité |
|
[raster] |
Couche raster de rugosité en sortie |
Code Python
Algorithm ID: native:ruggednessindex
import processing
processing.run("algorithm_id", {parameter_dictionary})
L”id de l’algorithme est affiché lors du survol du nom de l’algorithme dans la boîte à outils Traitements. Les nom et valeur de chaque paramètre sont fournis via un dictionnaire de paramètres. Voir Utiliser les algorithmes du module de traitements depuis la console Python pour plus de détails sur l’exécution d’algorithmes via la console Python.
24.1.20.8. Pente
Calcule la pente d’une couche raster en entrée. La pente est l’angle d’inclinaison du terrain et s’exprime en degrés.
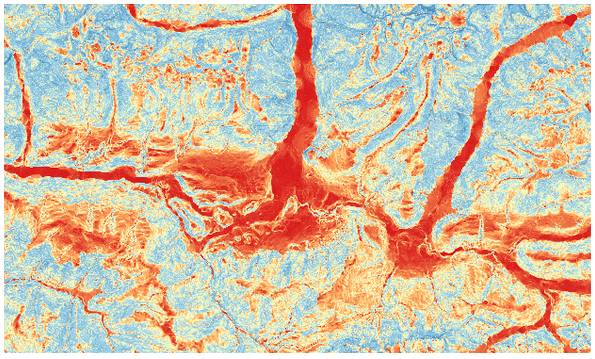
Fig. 24.79 Zones plates en rouge, zones escarpées en bleu
Paramètres
Etiquette |
Nom |
Type |
Description |
|---|---|---|---|
Couche d’élévation |
|
[raster] |
Couche raster de modèle de terrain numérique |
Facteur Z |
|
[numérique: décimal] Par défaut : 1.0 |
Exagération verticale. Ce paramètre est utile lorsque les unités Z diffèrent des unités X et Y, par exemple les pieds et les mètres. Vous pouvez utiliser ce paramètre pour régler cela. Augmenter la valeur de ce paramètre exagérera le résultat final (le rendant plus raide). La valeur par défaut est 1 (pas d’exagération). |
Pente |
|
[raster] Par défaut : |
Specify the output slope raster layer. One of:
|
Les sorties
Etiquette |
Nom |
Type |
Description |
|---|---|---|---|
Pente |
|
[raster] |
Couche raster de pente de sortie |
Code Python
Algorithm ID: native:slope
import processing
processing.run("algorithm_id", {parameter_dictionary})
L”id de l’algorithme est affiché lors du survol du nom de l’algorithme dans la boîte à outils Traitements. Les nom et valeur de chaque paramètre sont fournis via un dictionnaire de paramètres. Voir Utiliser les algorithmes du module de traitements depuis la console Python pour plus de détails sur l’exécution d’algorithmes via la console Python.